
电控消隙的变齿厚齿轮副.pdf

曦晨****22


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
电控消隙的变齿厚齿轮副.pdf
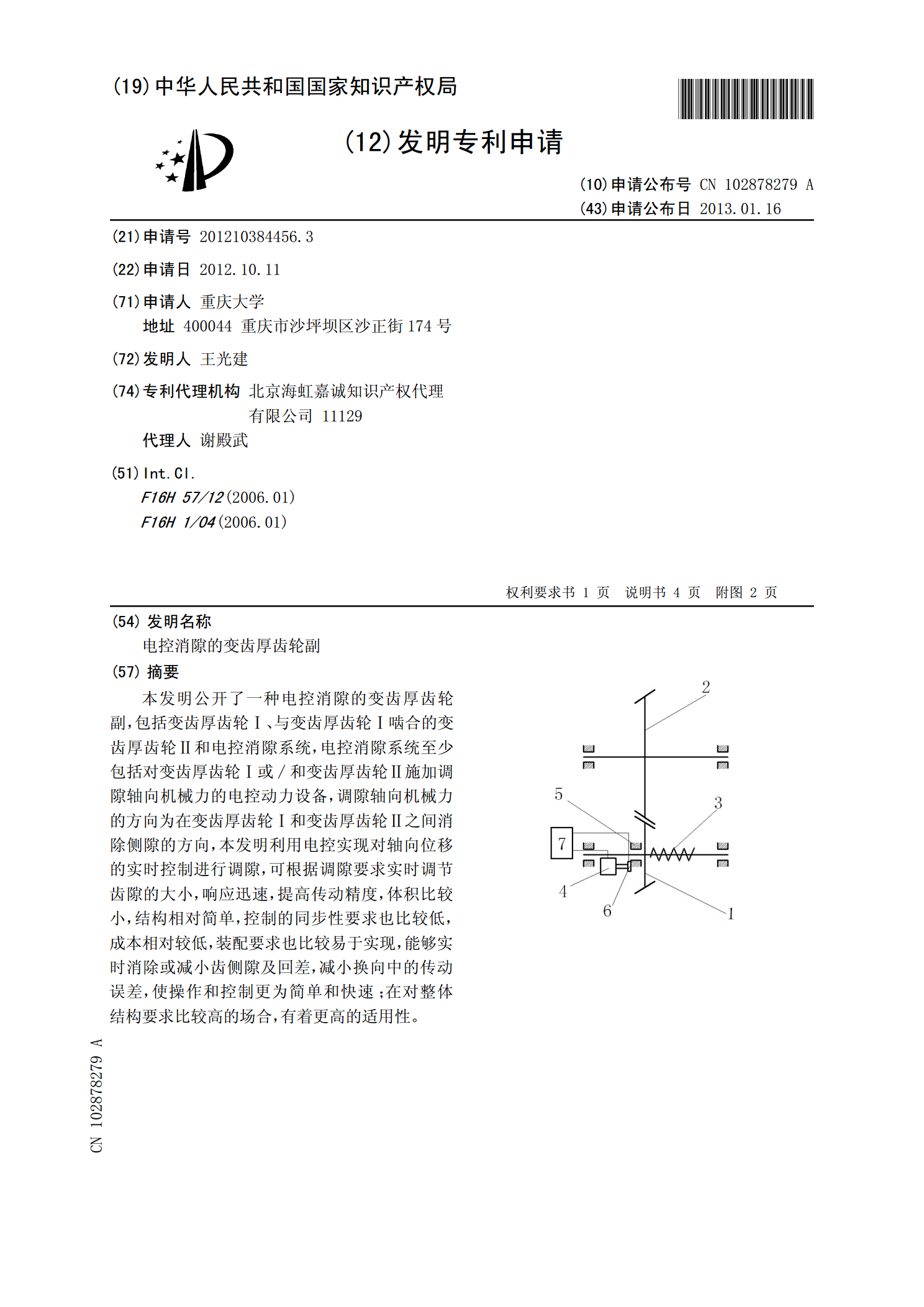
本发明公开了一种电控消隙的变齿厚齿轮副,包括变齿厚齿轮Ⅰ、与变齿厚齿轮Ⅰ啮合的变齿厚齿轮Ⅱ和电控消隙系统,电控消隙系统至少包括对变齿厚齿轮Ⅰ或/和变齿厚齿轮Ⅱ施加调隙轴向机械力的电控动力设备,调隙轴向机械力的方向为在变齿厚齿轮Ⅰ和变齿厚齿轮Ⅱ之间消除侧隙的方向,本发明利用电控实现对轴向位移的实时控制进行调隙,可根据调隙要求实时调节齿隙的大小,响应迅速,提高传动精度,体积比较小,结构相对简单,控制的同步性要求也比较低,成本相对较低,装配要求也比较易于实现,能够实时消除或减小齿侧隙及回差,减小换向中的传动误差

交变负载下变齿厚齿轮副侧隙控制试验研究.docx
交变负载下变齿厚齿轮副侧隙控制试验研究交变负载下变齿厚齿轮副侧隙控制试验研究摘要:本文以变齿厚齿轮副侧隙控制为目标,通过试验研究交变负载下的侧隙变化规律。试验结果表明,在交变负载下,侧隙的变化与齿轮副的振动频率和负载大小有关。针对侧隙变化导致的噪声和损伤问题,还进行了一些控制措施的讨论。本研究为变齿厚齿轮副侧隙控制提供了一定的理论和实验依据。1.引言变齿厚齿轮副在工业领域中广泛应用,但在运行过程中往往会面临侧隙的增加导致的噪声和损伤问题。因此,研究变齿厚齿轮副在交变负载下的侧隙变化规律,对于改善其运行性能

变齿厚齿轮的珩齿加工.pdf
第5卷第2期中国工程机械学报Vol.5No.22007年4月CHINESEJOURNALOFCONSTRUCTIONMACHINERYApr.2007齿轮传动中磨损问题的研究及修复方法综述赵丽娟,史辉(辽宁工程技术大学机械工程学院,辽宁阜新123000)摘要:齿轮传动是机器传递运动和动力的一种主要形式。如何减少齿轮工作中的磨损、延长其使用寿命是工业生产中至关重要的问题.总结了齿轮磨损问题的基本类型、研究历程、研究方法以及失效齿轮的常用修复方法等.关键词:齿轮传动;磨损;修复中图分类号:TH132.41文献

消隙斜齿圆柱齿轮.pdf
一种消隙斜齿圆柱齿轮,沿垂直于斜齿轮轴线的截面将斜齿轮分成左半齿轮1、右半齿轮2两部分,在两部分之间设置能使左半齿轮1与右半齿轮2沿轴向分离的弹性元件,包括垫环3、滑柱4、调节螺母6,所述垫环3有凹形锥面3‑1,垫环3镶嵌在左半齿轮1或右半齿轮2上且锥面3‑1朝外;所述滑柱4的外形为横截面呈“O”形的柱体,滑柱4的一个端面设有螺杆4‑1,在滑柱4上沿纵向开有两条斜底槽4‑2;所述左半齿轮1与右半齿轮2都沿轴向开有横截面呈“O”形的O形孔2‑1且滑柱4装在孔内;所述弹性元件是用杆状弹性材料弯制成“∩”形的∩
消隙直齿圆柱齿轮.pdf
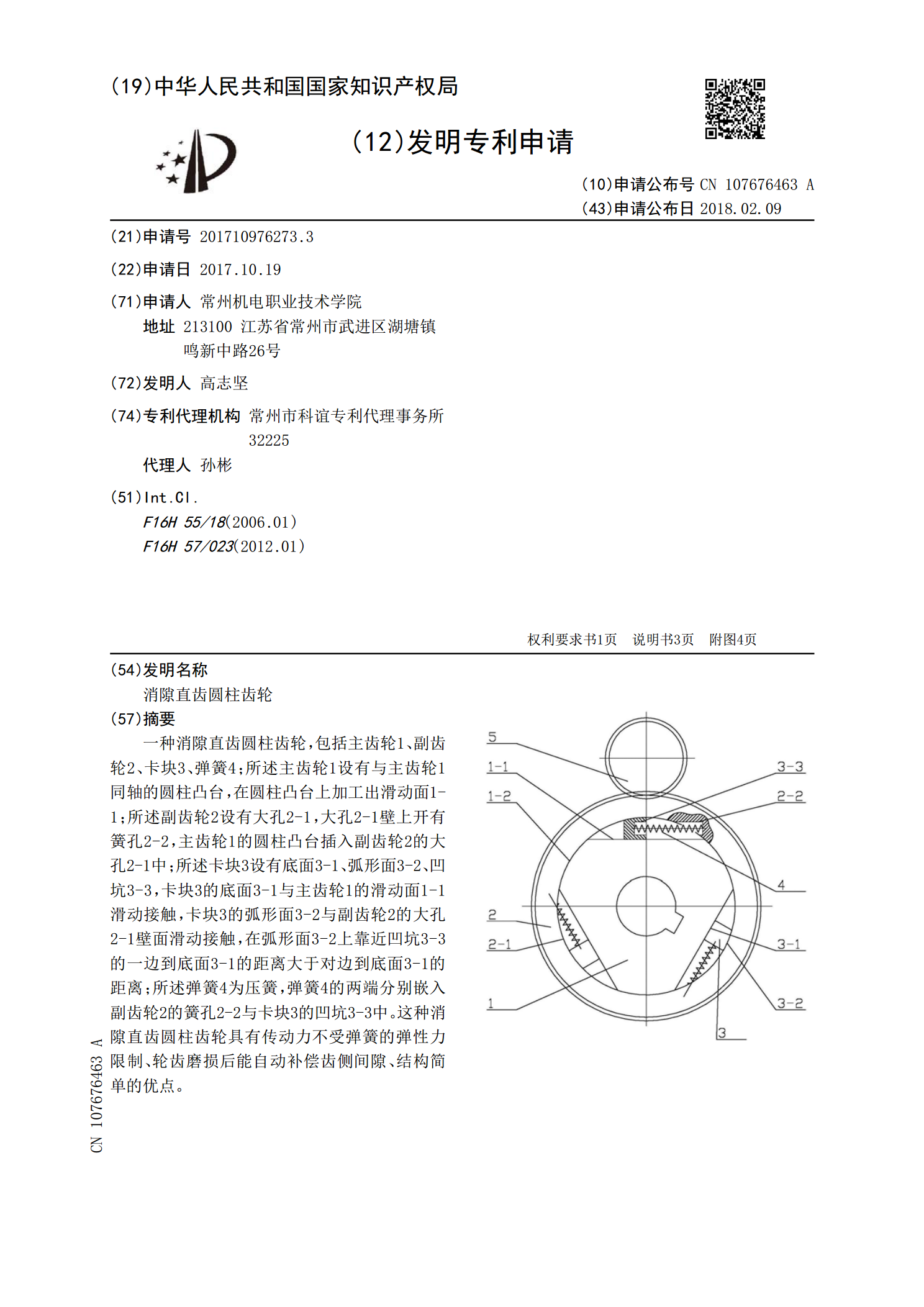
一种消隙直齿圆柱齿轮,包括主齿轮1、副齿轮2、卡块3、弹簧4;所述主齿轮1设有与主齿轮1同轴的圆柱凸台,在圆柱凸台上加工出滑动面1‑1;所述副齿轮2设有大孔2‑1,大孔2‑1壁上开有簧孔2‑2,主齿轮1的圆柱凸台插入副齿轮2的大孔2‑1中;所述卡块3设有底面3‑1、弧形面3‑2、凹坑3‑3,卡块3的底面3‑1与主齿轮1的滑动面1‑1滑动接触,卡块3的弧形面3‑2与副齿轮2的大孔2‑1壁面滑动接触,在弧形面3‑2上靠近凹坑3‑3的一边到底面3‑1的距离大于对边到底面3‑1的距离;所述弹簧4为压簧,弹簧4的两