
自驱动装置、引导系统及其移动方法.pdf

悠柔****找我


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自驱动装置、引导系统及其移动方法.pdf
本发明涉及一种自驱动装置,包括壳体;位于壳体内并驱动自驱动装置移动的驱动单元,驱动单元包括在外部导线限定的范围内移动的驱动轮;产生探测周期的周期设置单元;偏转探测装置,偏转探测装置在探测周期内探测自驱动装置的偏转量;控制驱动轮移动速度的控制单元,其中自驱动装置还包括对偏转量与预设值进行比较的比较单元,若偏转量大于预设值,控制单元控制自驱动装置离开所述导线;若偏转量不大于预设值,控制单元控制自驱动装置沿所述导线移动。本发明中的自驱动装置能够在沿导线移动过程中准确识别不同的导线。
地面移动设备的引导装置及其引导方法.pdf
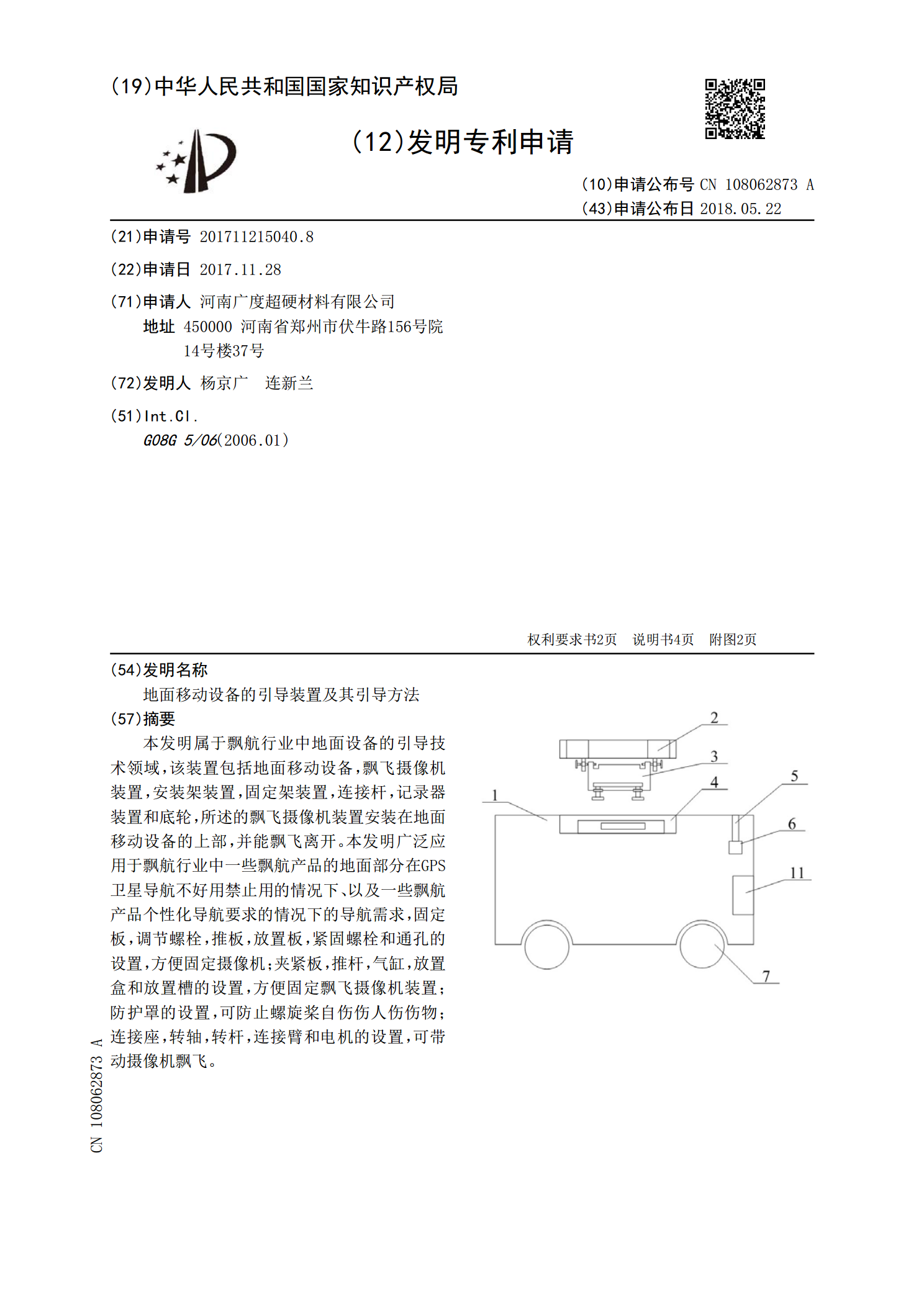
本发明属于飘航行业中地面设备的引导技术领域,该装置包括地面移动设备,飘飞摄像机装置,安装架装置,固定架装置,连接杆,记录器装置和底轮,所述的飘飞摄像机装置安装在地面移动设备的上部,并能飘飞离开。本发明广泛应用于飘航行业中一些飘航产品的地面部分在GPS卫星导航不好用禁止用的情况下、以及一些飘航产品个性化导航要求的情况下的导航需求,固定板,调节螺栓,推板,放置板,紧固螺栓和通孔的设置,方便固定摄像机;夹紧板,推杆,气缸,放置盒和放置槽的设置,方便固定飘飞摄像机装置;防护罩的设置,可防止螺旋桨自伤伤人伤伤物;连
自移动装置控制方法、装置、系统、介质及自移动装置.pdf
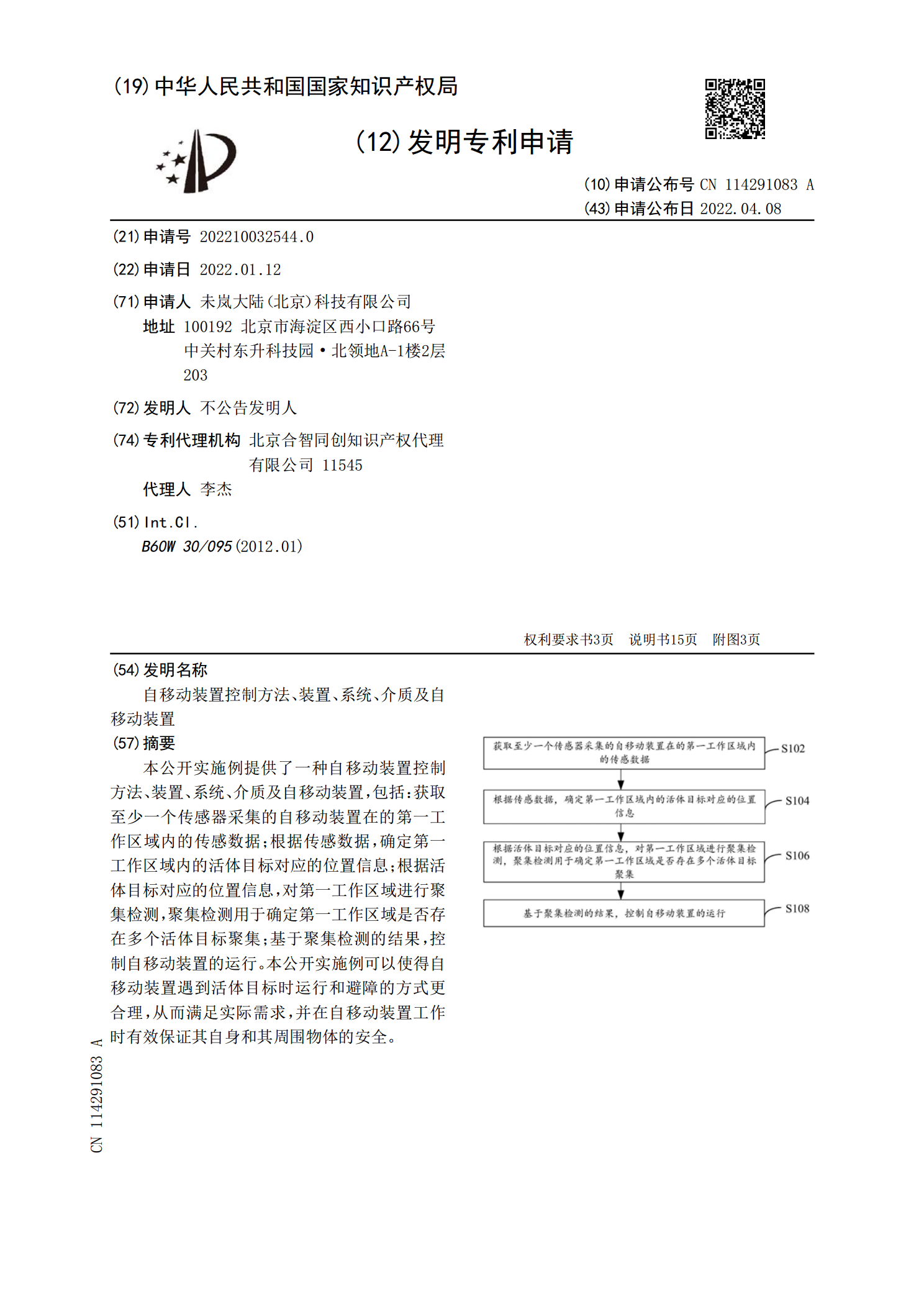
本公开实施例提供了一种自移动装置控制方法、装置、系统、介质及自移动装置,包括:获取至少一个传感器采集的自移动装置在的第一工作区域内的传感数据;根据传感数据,确定第一工作区域内的活体目标对应的位置信息;根据活体目标对应的位置信息,对第一工作区域进行聚集检测,聚集检测用于确定第一工作区域是否存在多个活体目标聚集;基于聚集检测的结果,控制自移动装置的运行。本公开实施例可以使得自移动装置遇到活体目标时运行和避障的方式更合理,从而满足实际需求,并在自移动装置工作时有效保证其自身和其周围物体的安全。

移动终端装置及其驱动方法.pdf
公开了一种基于触摸强度来解除锁定模式以防止由无意触摸引起解锁操作的移动终端装置及其驱动方法,其中,该驱动方法可包括:当在锁定模式下发生多次触摸时检测每次触摸的触摸强度,以及基于所检测到的多个触摸强度来解除锁定模式,或者执行与所检测到的多个触摸强度对应的功能。
自驱动排污监控系统及其监控方法.pdf
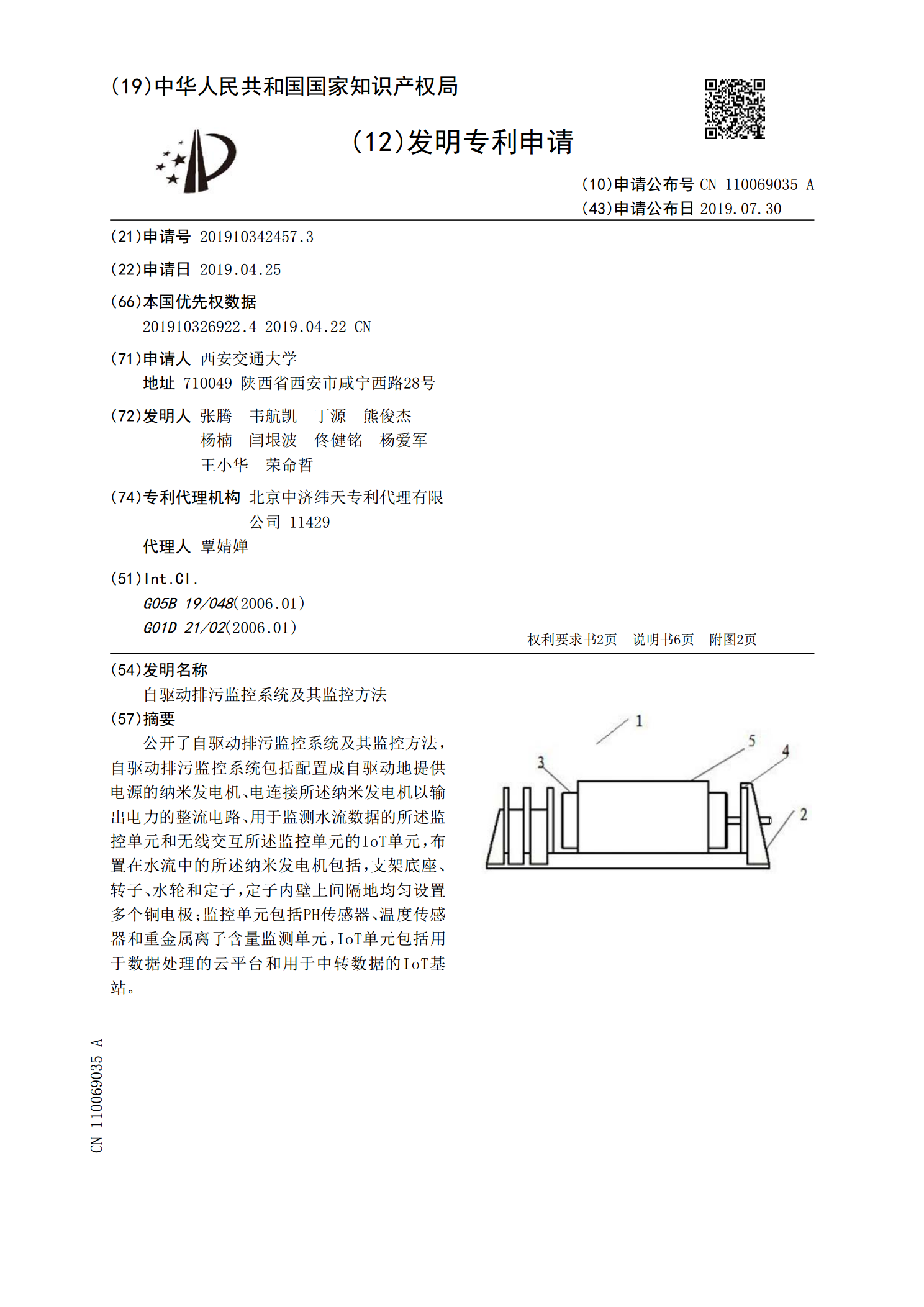
公开了自驱动排污监控系统及其监控方法,自驱动排污监控系统包括配置成自驱动地提供电源的纳米发电机、电连接所述纳米发电机以输出电力的整流电路、用于监测水流数据的所述监控单元和无线交互所述监控单元的IoT单元,布置在水流中的所述纳米发电机包括,支架底座、转子、水轮和定子,定子内壁上间隔地均匀设置多个铜电极;监控单元包括PH传感器、温度传感器和重金属离子含量监测单元,IoT单元包括用于数据处理的云平台和用于中转数据的IoT基站。