
一种自治式水下航行器矢量推进装置.pdf

书生****萌哒


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自治式水下航行器矢量推进装置.pdf
本发明公开了一种自治式水下航行器矢量推进装置,包括连接架、俯仰传动机构和转向传动机构,所述俯仰传动机构包括依次连接的俯仰驱动装置、俯仰圆柱齿轮传动机构和俯仰螺旋传动机构;所述转向传动机构包括托架以及依次连接的转向驱动装置、圆锥齿轮传动机构、转向圆柱齿轮传动机构、转向螺旋传动机构、操纵力传递机构、主推电机和螺旋桨。本发明采用矢量推进,省去了舵等操纵面,使AUV整体结构更加紧凑,外形更加完整流畅,阻力减少;与舵等操纵面相比,矢量推进直接改变推进力的方向,即使在低速下也能获得很大的操纵力,使AUV具有良好的低速

矢量推进式新型水下航行器主体的关键结构研究的开题报告.docx
矢量推进式新型水下航行器主体的关键结构研究的开题报告一、研究背景随着科技的不断发展,水下航行器的技术也在不断提高和改进。传统的水下航行器采用螺旋桨推进,存在结构复杂、靠电池供电续航能力不强等问题,因此需要开发新型的水下航行器。本文旨在通过研究矢量推进式新型水下航行器主体的关键结构,提高其推进效率和控制性能,以满足未来的水下探测和勘探任务需求。二、研究内容1.矢量推进原理矢量推进是一种新型船舶推进方案,其原理是将推进器的推力按照不同方向分配,从而控制船舶运动方向和速度。本研究将设计一种适用于水下航行器的矢量

泵组推进式水下航行器.pdf
本发明涉及泵组推进式水下航行器,可有效解决水下航行器自吸能力差,难以满足水下航行器的水动力性能的问题,技术方案是,壳体的前后两端分别设置有前喷射口总成和后喷射口总成,壳体上分别设置有进水口和用于控制壳体行进方向的喷射口,进水口与离心泵的进水口相连,离心泵的出水口与高压柱塞泵的进水口相连,高压柱塞泵的出水口分别与前喷射口总成、后喷射口总成和喷射口相连,构成壳体的行进方向控制结构,蓄水箱的进水口与双向齿轮泵的出水口相连,双向齿轮泵的出水口与设置在壳体上的换水口相连,构成壳体的浮力式上下位置调节结构,本发明保证

矢量推进式新型水下航行器主体的关键结构研究的任务书.docx
矢量推进式新型水下航行器主体的关键结构研究的任务书任务书一、任务背景水下航行器是一种从水面往下潜行的航行工具,具有广泛的应用场景,在国防、海洋调查、水下资源开发等领域都有重要的作用。目前,水下航行器的主要推进方法有螺旋桨、喷水推进、水动力推进等,但这些推进方式由于设计结构、能量利用效率以及适应复杂水下环境的能力等方面存在一些问题。因此,研究一种新型的水下航行器推进方式,具有重要的意义。矢量推进式新型水下航行器推进方式采用了喷向不同方向的多个喷口,可以灵活控制航行器的航向和速度,可以避免传统水下航行器在复杂
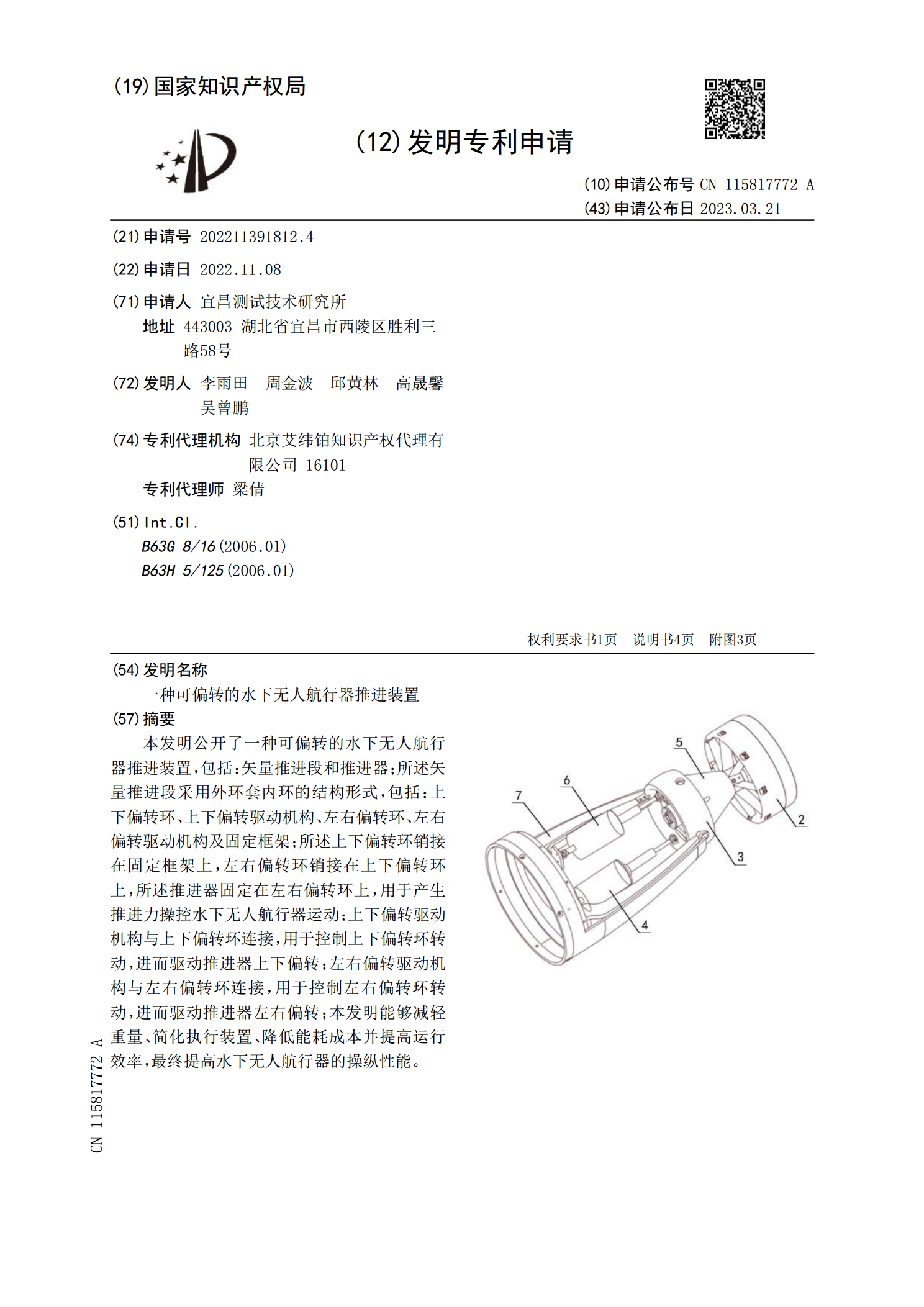
一种可偏转的水下无人航行器推进装置.pdf
本发明公开了一种可偏转的水下无人航行器推进装置,包括:矢量推进段和推进器;所述矢量推进段采用外环套内环的结构形式,包括:上下偏转环、上下偏转驱动机构、左右偏转环、左右偏转驱动机构及固定框架;所述上下偏转环销接在固定框架上,左右偏转环销接在上下偏转环上,所述推进器固定在左右偏转环上,用于产生推进力操控水下无人航行器运动;上下偏转驱动机构与上下偏转环连接,用于控制上下偏转环转动,进而驱动推进器上下偏转;左右偏转驱动机构与左右偏转环连接,用于控制左右偏转环转动,进而驱动推进器左右偏转;本发明能够减轻重量、简化执