
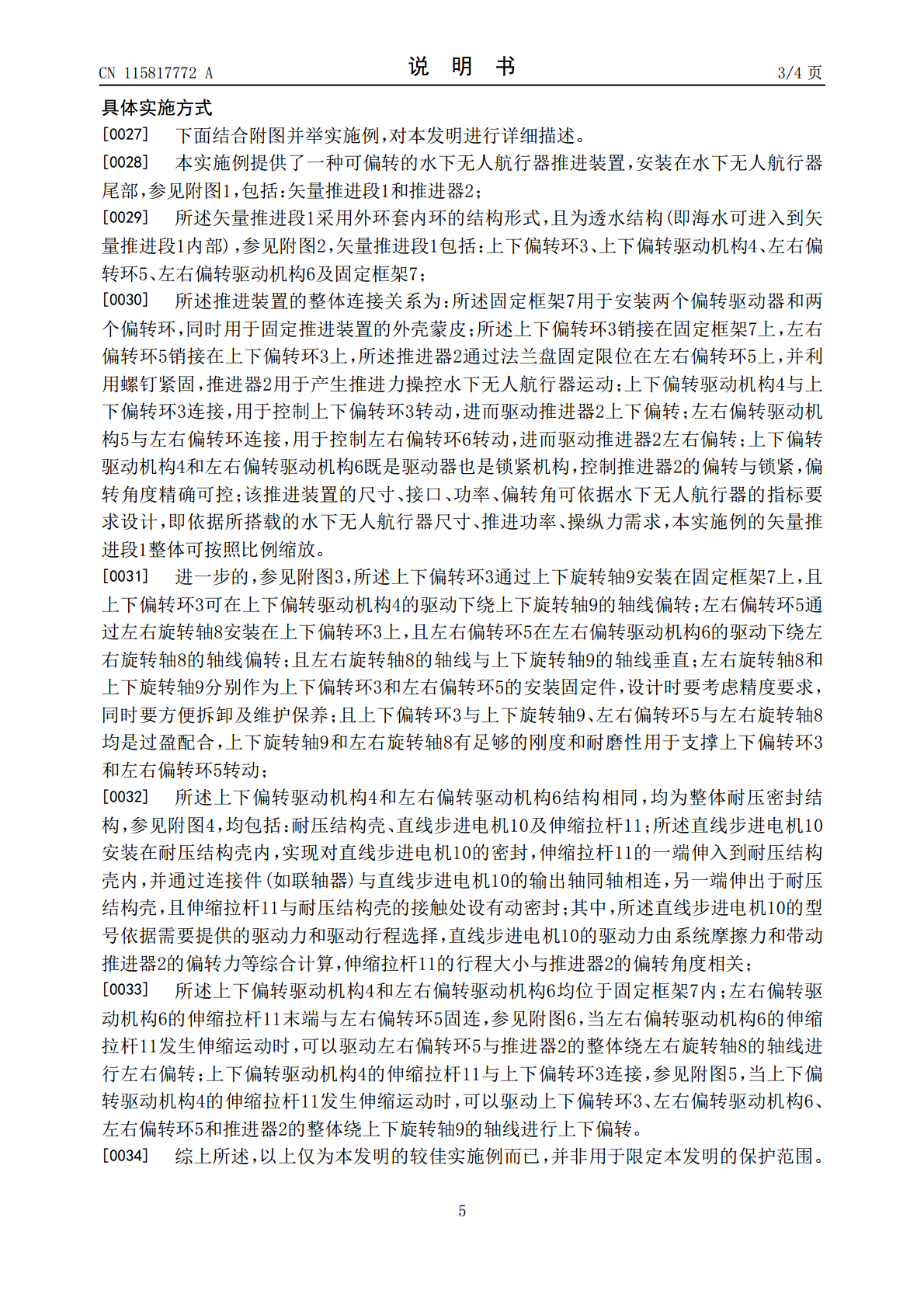
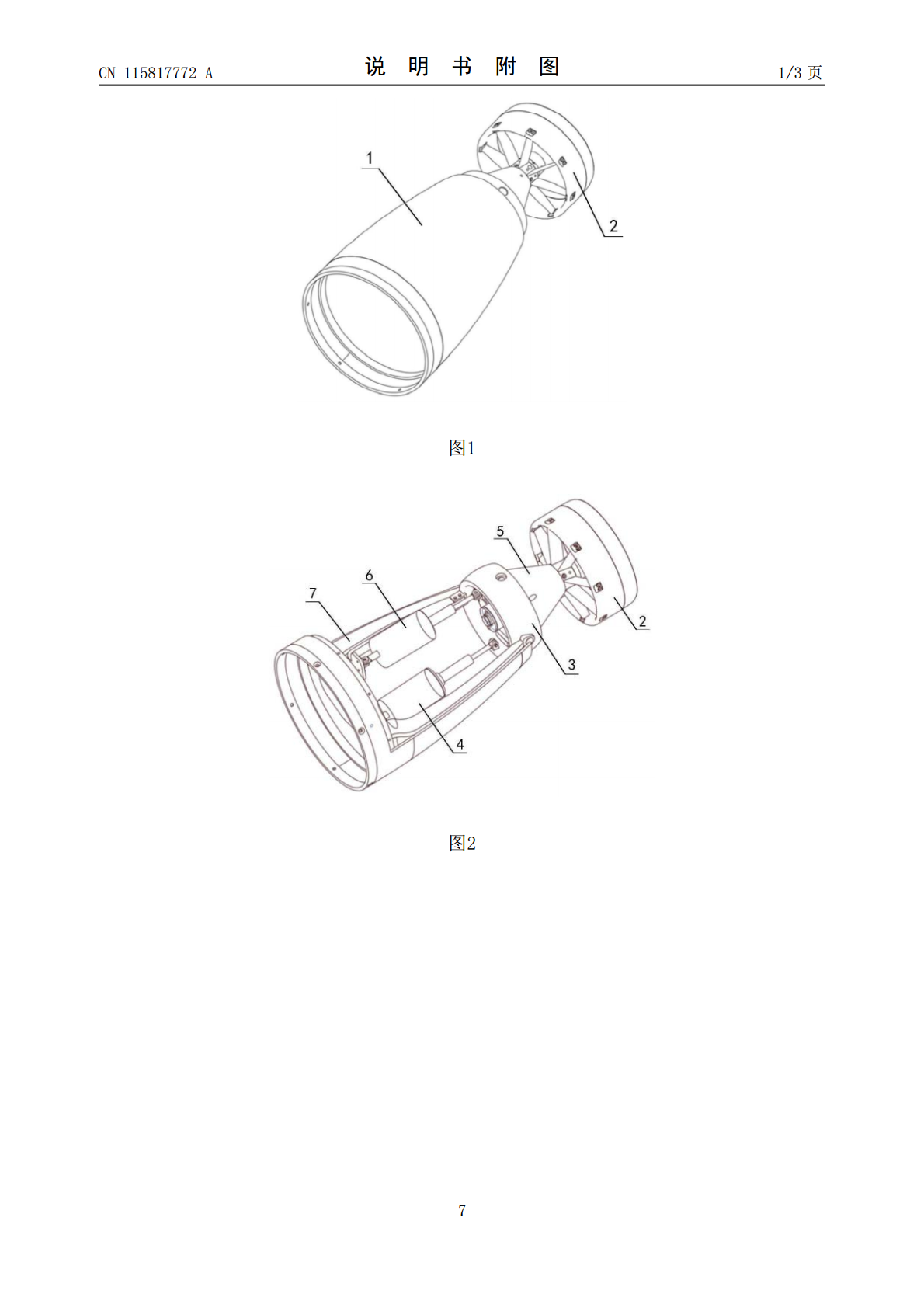
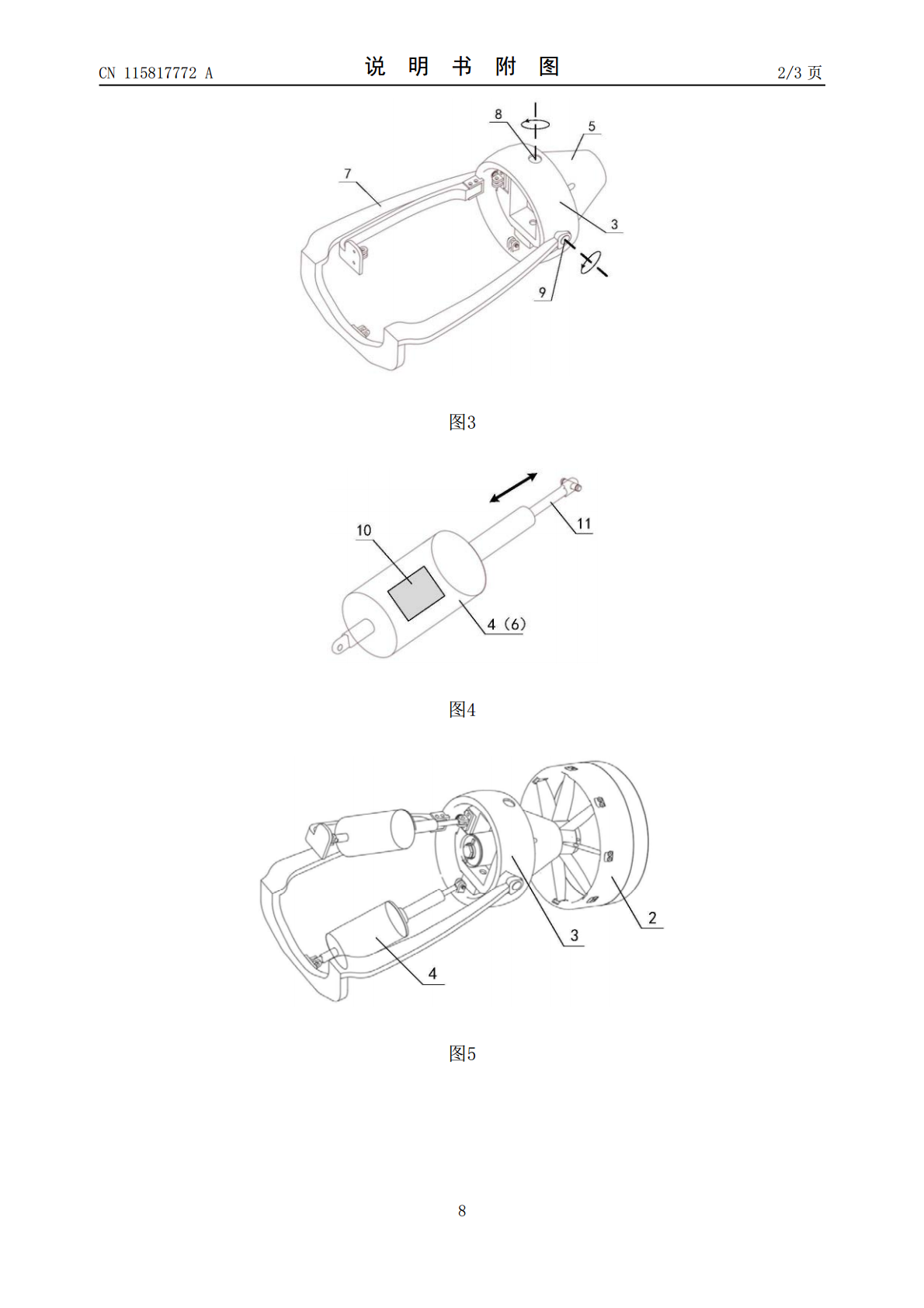
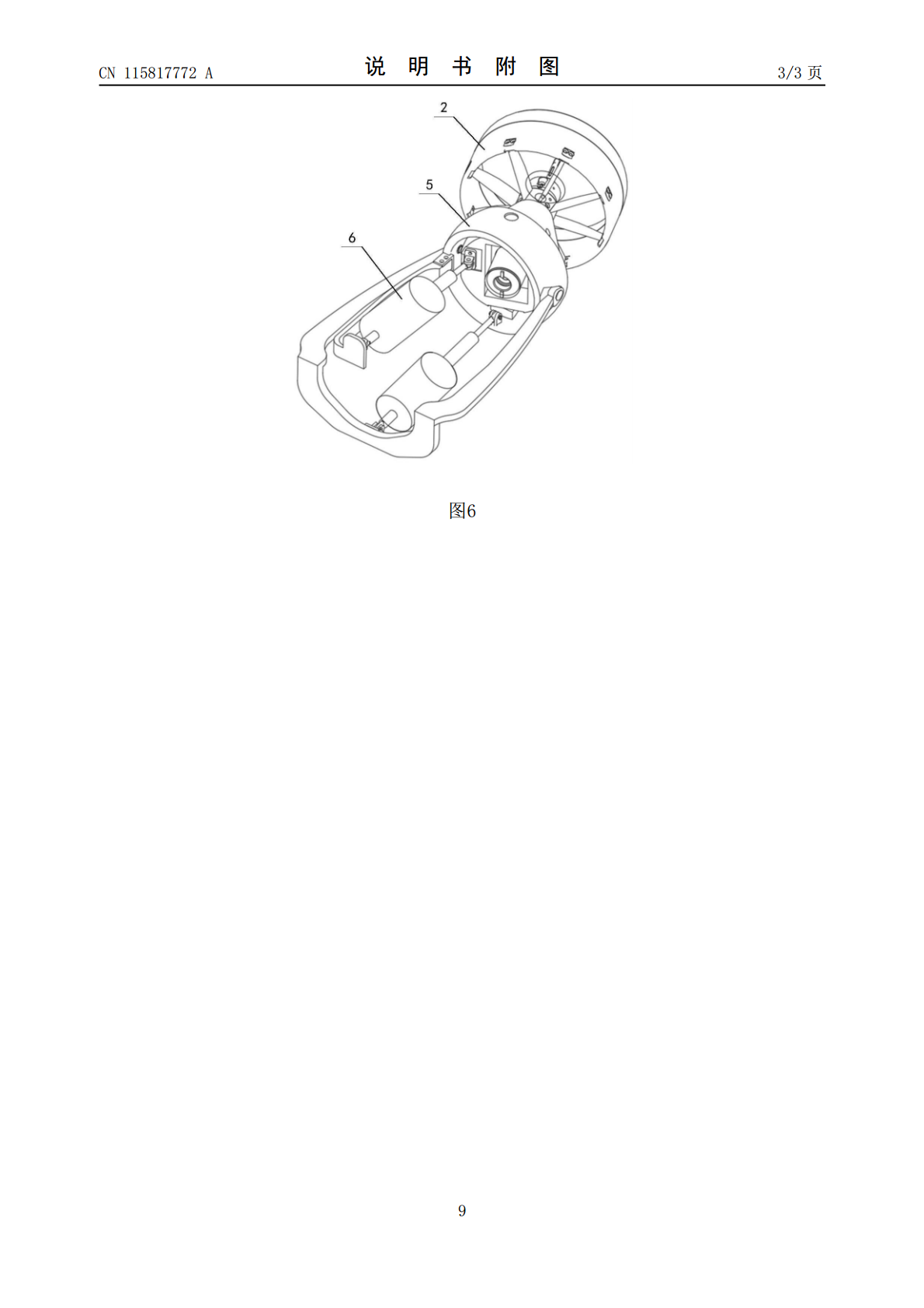
一种可偏转的水下无人航行器推进装置.pdf

书生****专家

1/9
2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可偏转的水下无人航行器推进装置.pdf
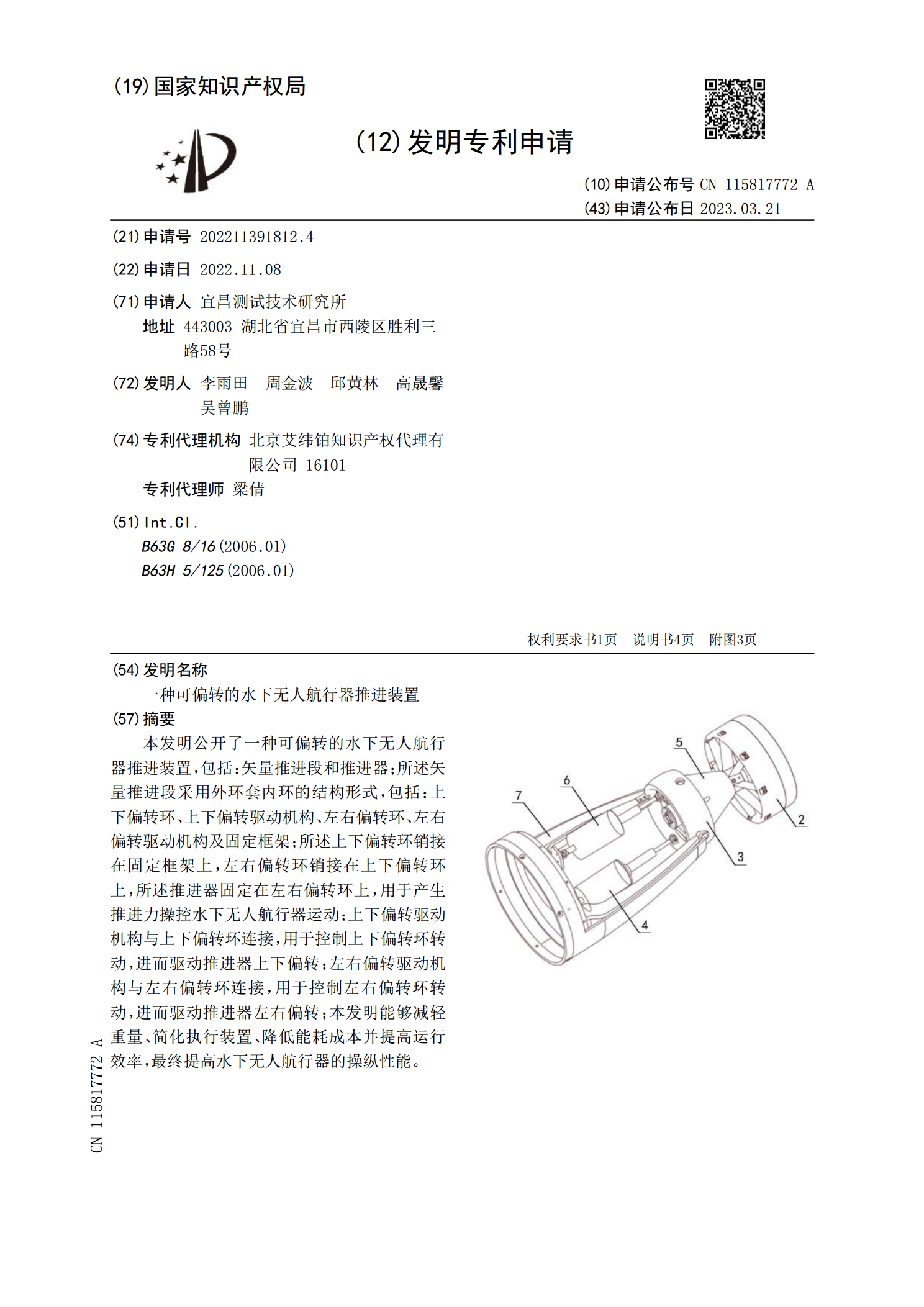
本发明公开了一种可偏转的水下无人航行器推进装置,包括:矢量推进段和推进器;所述矢量推进段采用外环套内环的结构形式,包括:上下偏转环、上下偏转驱动机构、左右偏转环、左右偏转驱动机构及固定框架;所述上下偏转环销接在固定框架上,左右偏转环销接在上下偏转环上,所述推进器固定在左右偏转环上,用于产生推进力操控水下无人航行器运动;上下偏转驱动机构与上下偏转环连接,用于控制上下偏转环转动,进而驱动推进器上下偏转;左右偏转驱动机构与左右偏转环连接,用于控制左右偏转环转动,进而驱动推进器左右偏转;本发明能够减轻重量、简化执
水下无人航行器主动对接装置及水下无人航行器.pdf
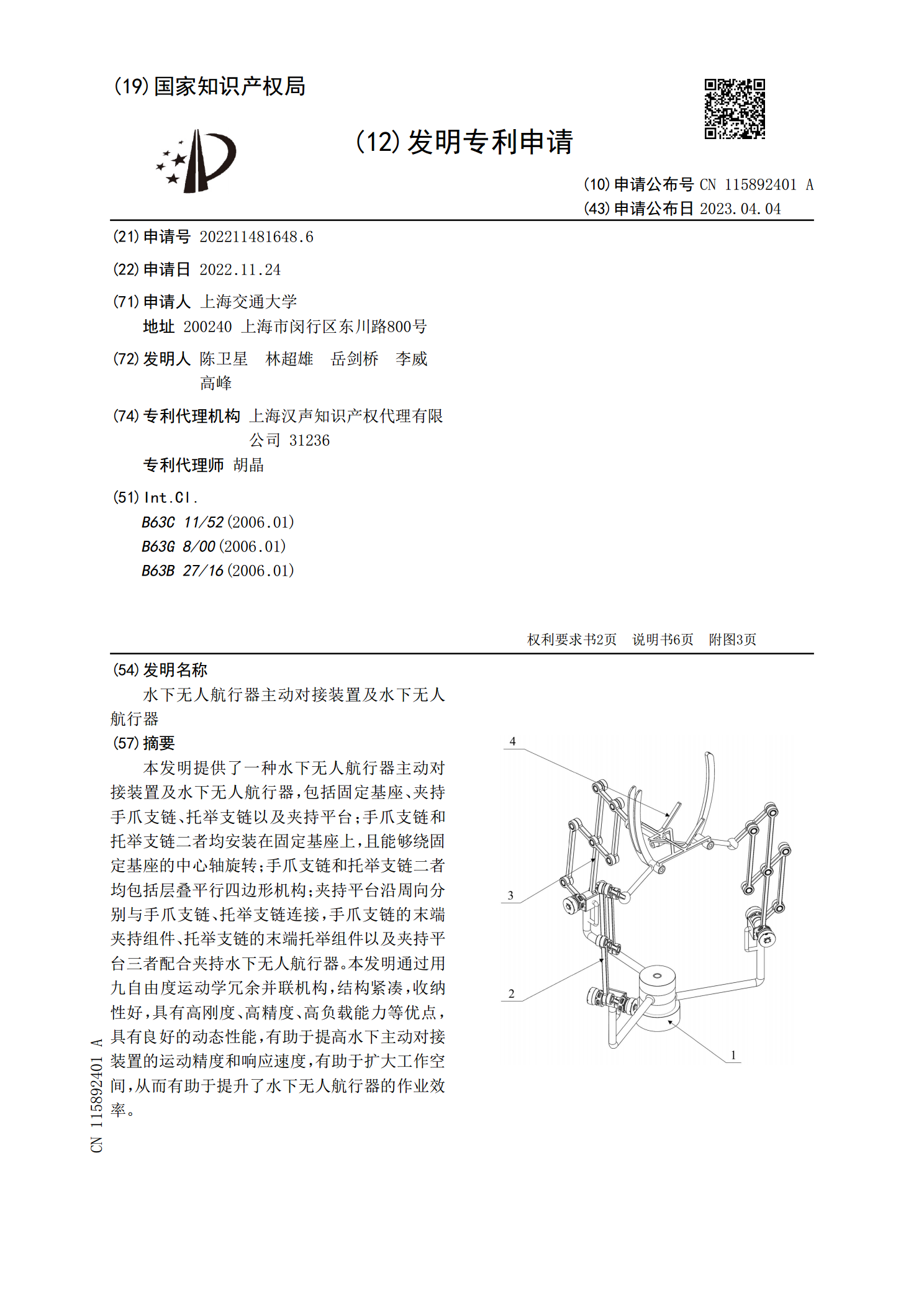
本发明提供了一种水下无人航行器主动对接装置及水下无人航行器,包括固定基座、夹持手爪支链、托举支链以及夹持平台;手爪支链和托举支链二者均安装在固定基座上,且能够绕固定基座的中心轴旋转;手爪支链和托举支链二者均包括层叠平行四边形机构;夹持平台沿周向分别与手爪支链、托举支链连接,手爪支链的末端夹持组件、托举支链的末端托举组件以及夹持平台三者配合夹持水下无人航行器。本发明通过用九自由度运动学冗余并联机构,结构紧凑,收纳性好,具有高刚度、高精度、高负载能力等优点,具有良好的动态性能,有助于提高水下主动对接装置的运动

无人水下航行器的发展与展望.docx
无人水下航行器的发展与展望【摘要】以无人水下航行器的发展趋势与功用为主题介绍了无人水下航行器的特点和使命阐述了无人水下航行器的发展历程和研究现状重点介绍了美国在无人水下航行器方面的发展过程和发展方向。最后展望了其未来发展重点及在军事方面的广泛应用。【关键词】无人水下航行器;发展;功用;展望1.引言无人水下航行器[1](UUVUnmannedUnder-waterVehicle)是以潜艇和水面舰艇为载体具有长时间续航能力并且可回收的小型智能
无人水下航行器的发展与展望.docx
无人水下航行器的发展与展望【摘要】以无人水下航行器的发展趋势与功用为主题介绍了无人水下航行器的特点和使命阐述了无人水下航行器的发展历程和研究现状重点介绍了美国在无人水下航行器方面的发展过程和发展方向。最后展望了其未来发展重点及在军事方面的广泛应用。【关键词】无人水下航行器;发展;功用;展望1.引言无人水下航行器[1](UUVUnmannedUnder-waterVehicle)是以潜艇和水面舰艇为载体具有长时间续航能力并且可回收的小型智能

一种自治式水下航行器矢量推进装置.pdf
本发明公开了一种自治式水下航行器矢量推进装置,包括连接架、俯仰传动机构和转向传动机构,所述俯仰传动机构包括依次连接的俯仰驱动装置、俯仰圆柱齿轮传动机构和俯仰螺旋传动机构;所述转向传动机构包括托架以及依次连接的转向驱动装置、圆锥齿轮传动机构、转向圆柱齿轮传动机构、转向螺旋传动机构、操纵力传递机构、主推电机和螺旋桨。本发明采用矢量推进,省去了舵等操纵面,使AUV整体结构更加紧凑,外形更加完整流畅,阻力减少;与舵等操纵面相比,矢量推进直接改变推进力的方向,即使在低速下也能获得很大的操纵力,使AUV具有良好的低速