
可变安装高度的轮式差速驱动转向装置.pdf

小宏****aa


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

可变安装高度的轮式差速驱动转向装置.pdf
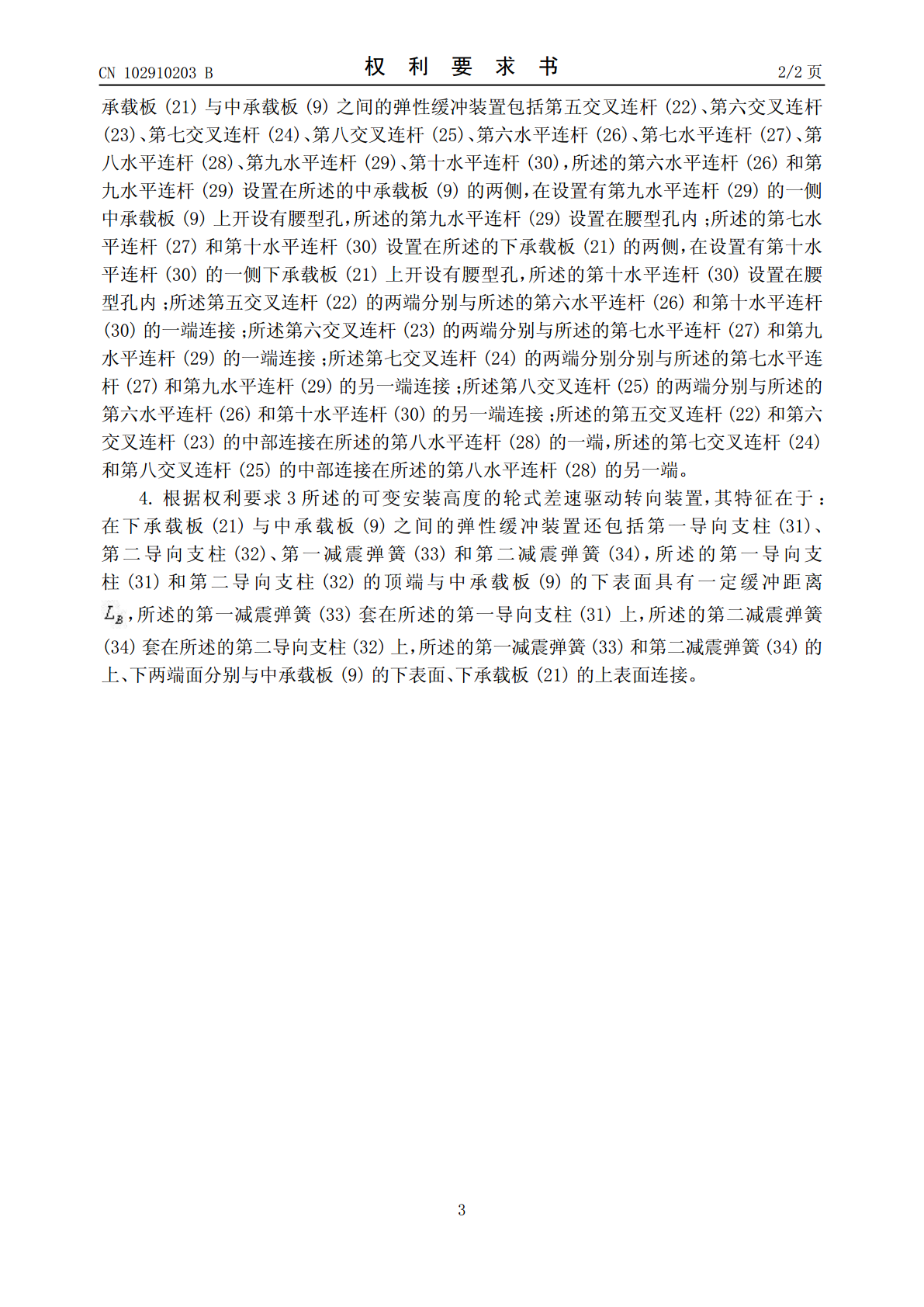
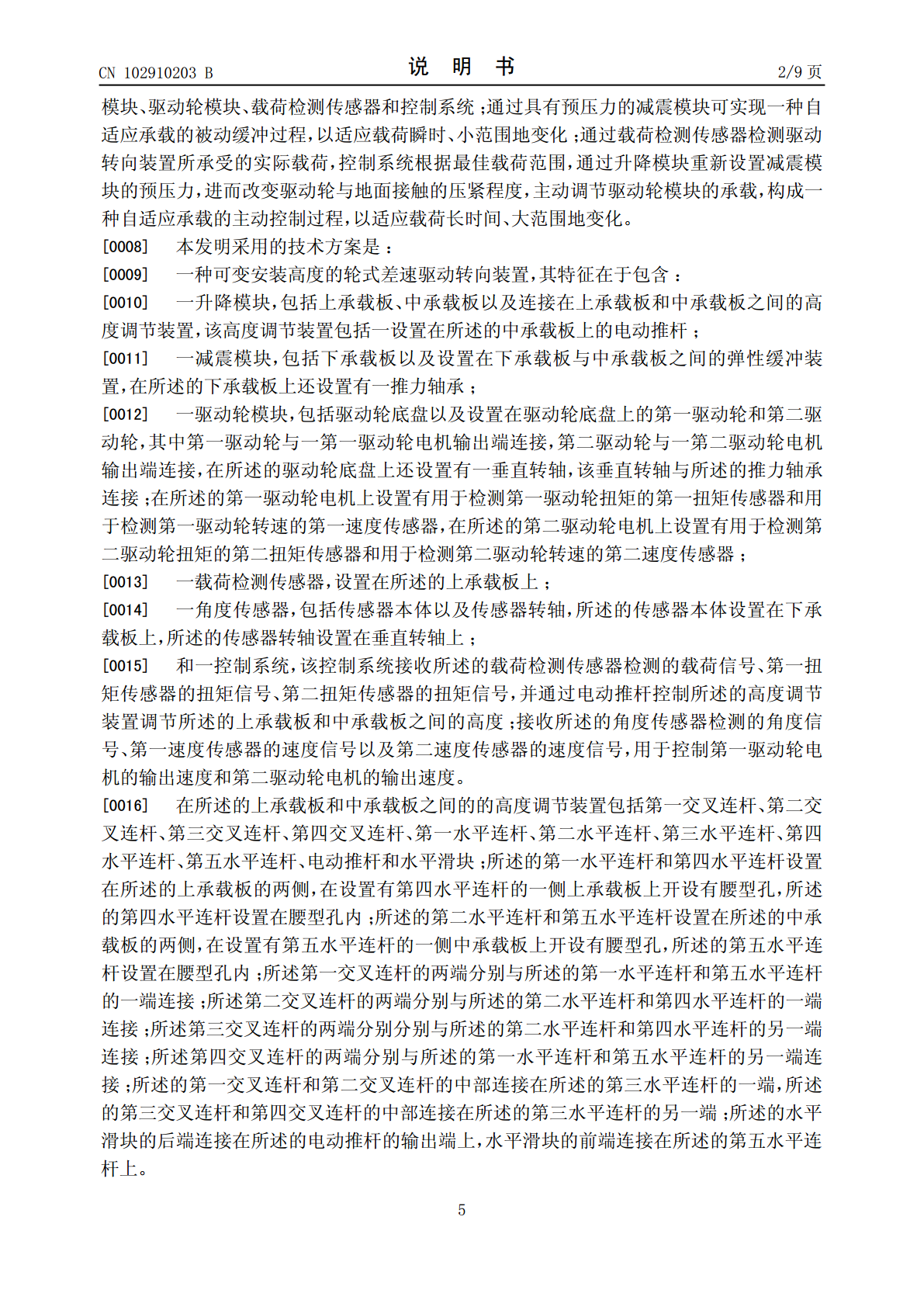
本发明公开了一种可变安装高度的轮式差速驱动转向装置。该驱动转向装置包含升降模块、减震模块、驱动轮模块、载荷检测传感器和控制系统。控制系统由车辆行驶所需的最小驱动力计算驱动转向装置所应承受的最佳载荷,通过升降模块主动调节驱动轮与地面接触的压紧程度,通过减震模块在车辆行驶过程中保持该压紧程度,从而使驱动转向装置能够获得并保持该最佳承载,既避免因承载过大而引起的电机转矩不足,又避免因承载过小而引起的驱动轮打滑。该装置可在相同整车载荷条件下显著降低对电机功率和电池容量的要求,提高电动车辆的带负载能力。
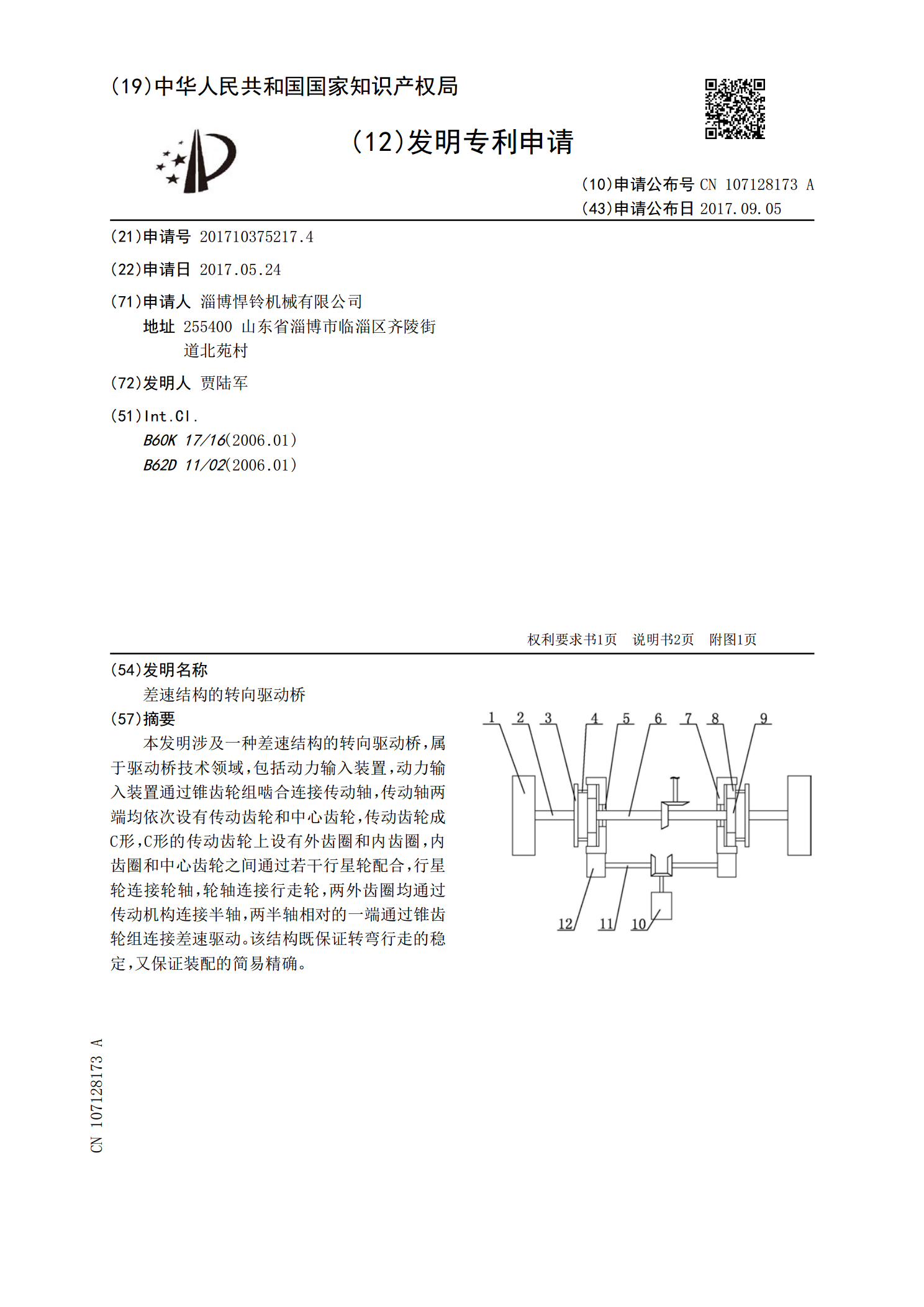
差速结构的转向驱动桥.pdf
本发明涉及一种差速结构的转向驱动桥,属于驱动桥技术领域,包括动力输入装置,动力输入装置通过锥齿轮组啮合连接传动轴,传动轴两端均依次设有传动齿轮和中心齿轮,传动齿轮成C形,C形的传动齿轮上设有外齿圈和内齿圈,内齿圈和中心齿轮之间通过若干行星轮配合,行星轮连接轮轴,轮轴连接行走轮,两外齿圈均通过传动机构连接半轴,两半轴相对的一端通过锥齿轮组连接差速驱动。该结构既保证转弯行走的稳定,又保证装配的简易精确。

复合传动型差速转向驱动机构及行走装置.pdf
本发明公开了一种复合传动型差速转向驱动机构及行走装置,对于复合传动型差速转向驱动机构,其驱动模块具有第一驱动部和第二驱动部,转动主体包括壳套、第一转轴和第二转轴,第一转轴外套有第一从动轮,第一从动轮与第一驱动部连接并固定在壳套上,第二转轴外则套装第二从动轮和一号传动轮,第二从动轮固定在一号传动轮上并与第二驱动部连接,启动驱动模块不仅能对齿轮组进行传动控制,也带动了壳套的转动,实现复合传动;再者,第一转轴与第二转轴伸入壳套内的端部固定有主锥齿轮,两主锥齿轮与一从锥齿轮啮合形成齿轮组,如此确保了第一转轴和第二
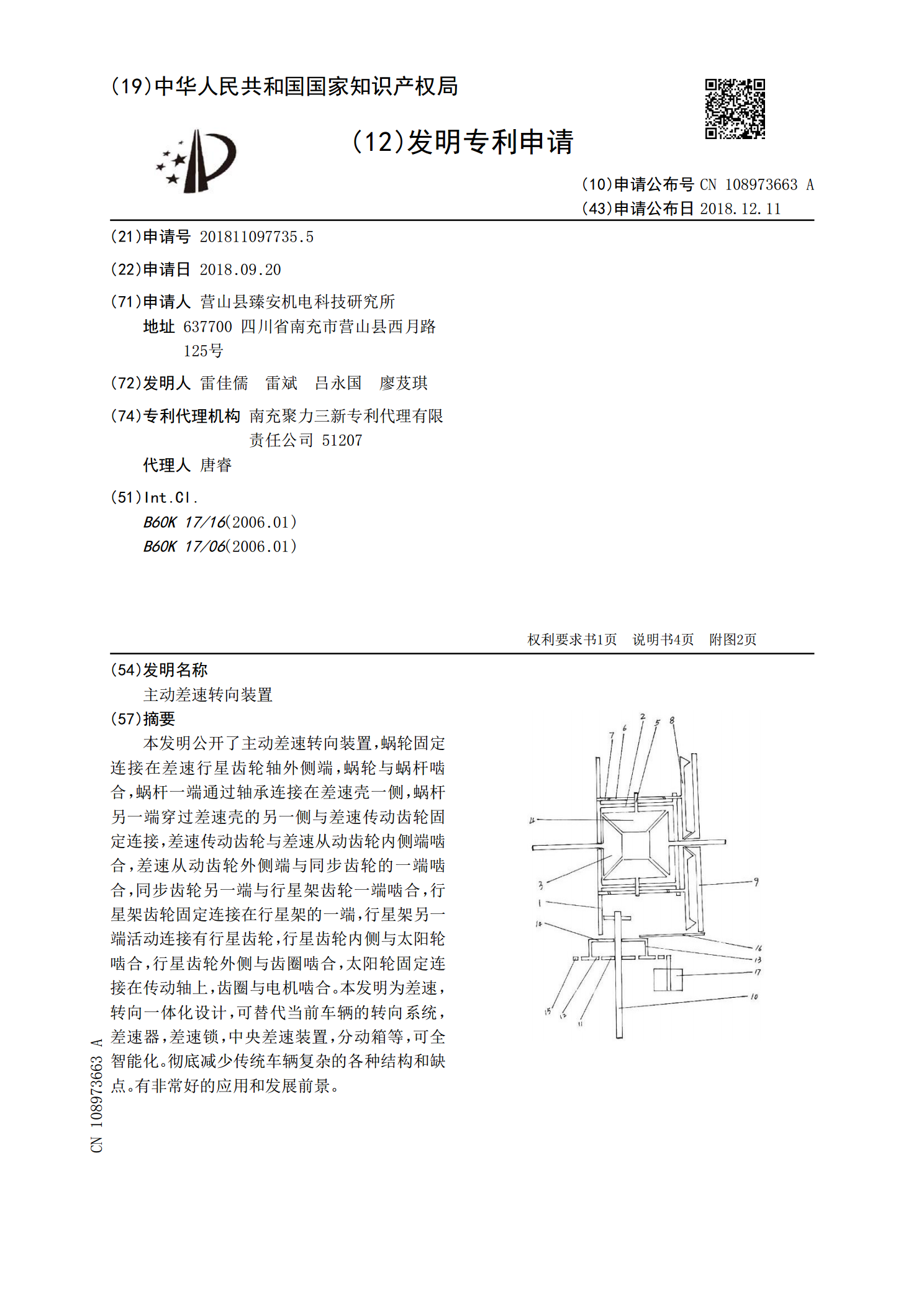
主动差速转向装置.pdf
本发明公开了主动差速转向装置,蜗轮固定连接在差速行星齿轮轴外侧端,蜗轮与蜗杆啮合,蜗杆一端通过轴承连接在差速壳一侧,蜗杆另一端穿过差速壳的另一侧与差速传动齿轮固定连接,差速传动齿轮与差速从动齿轮内侧端啮合,差速从动齿轮外侧端与同步齿轮的一端啮合,同步齿轮另一端与行星架齿轮一端啮合,行星架齿轮固定连接在行星架的一端,行星架另一端活动连接有行星齿轮,行星齿轮内侧与太阳轮啮合,行星齿轮外侧与齿圈啮合,太阳轮固定连接在传动轴上,齿圈与电机啮合。本发明为差速,转向一体化设计,可替代当前车辆的转向系统,差速器,差速锁
双轮差速转向驱动轮.pdf
本发明双轮差速转向驱动轮,包括双轮差速驱动轮和与双轮差速驱动轮对应设置且相配合使用的驱动轮转盘组件;双轮差速驱动轮包括电机及支架组件、对称设置于电机及支架组件两侧的且均与电机及支架组件配合使用的单侧驱动轮组件和单侧随动轮组件,电机及支架组件连接有减速箱组件,减速箱组件与单侧驱动轮组件相对应相配合使用。本发明在电机及支架组件两侧分别安装一个单侧驱动轮和单侧随动轮,使得驱动轮有两个轮子同时承受载荷,提高了驱动轮的承载能力;单侧驱动轮和单侧随动轮位于驱动轮转盘组件中心两侧,在转向时两轮可通过差速旋转,把单轮转向