
复波式谐波传动减速器.pdf

是你****盟主


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

复波式谐波传动减速器.pdf
本发明提供了一种复波式谐波传动减速器,其包括波发生器、柔轮、固定刚轮和输出刚轮,其中,波发生器具有凸轮、第一柔性轴承、第二柔性轴承,柔轮具有第一外齿轮和第二外齿轮,分别位于柔轮的两端,凸轮通过第一柔性轴承使柔轮的第一外齿轮与固定刚轮啮合,凸轮通过第二柔性轴承使柔轮的第二外齿轮与输出刚轮啮合。本发明以复波的形式实现了两级谐波传动减速,结构紧凑、体积小、传动比大、传动精度高,具有广泛的应用。
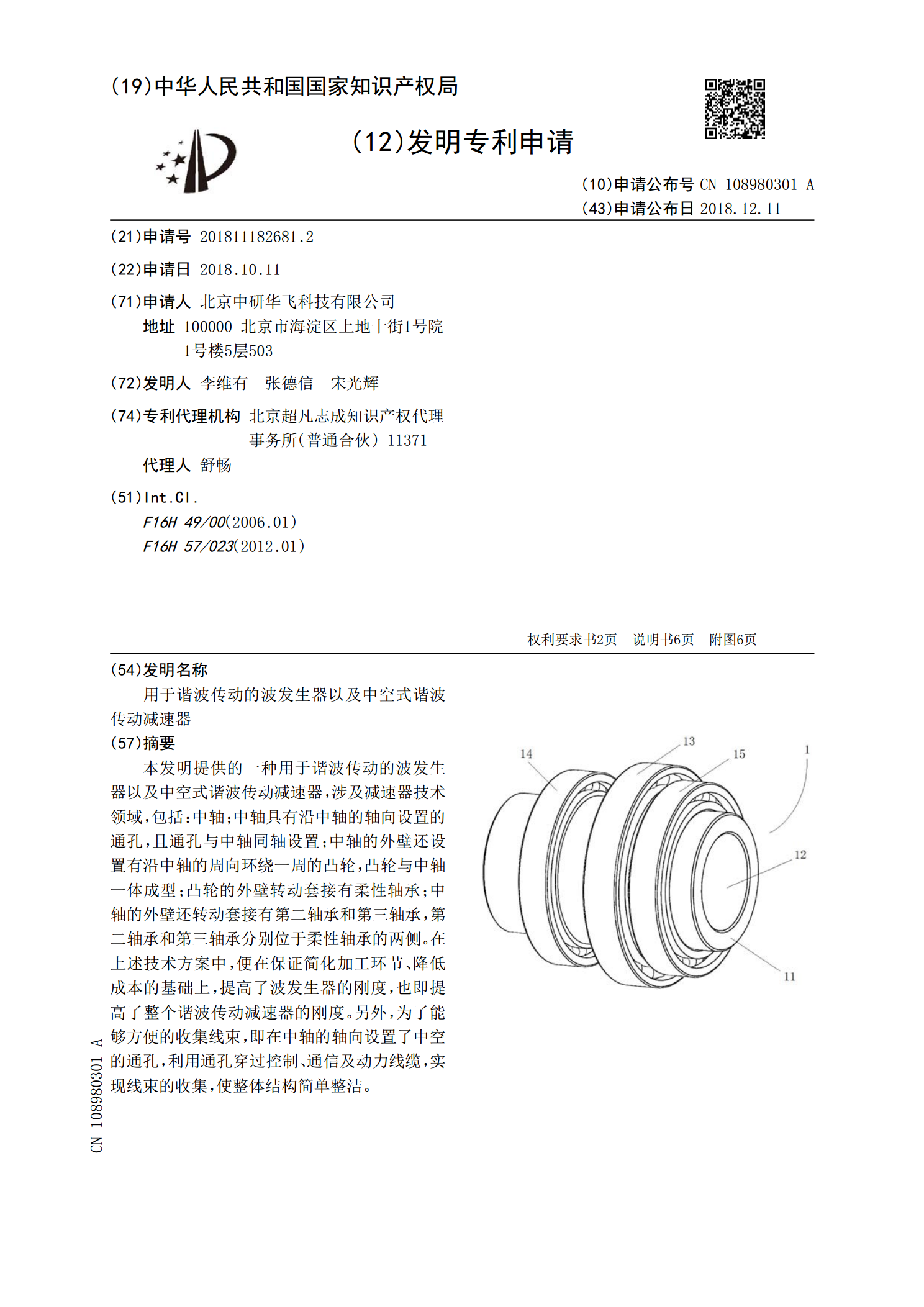
用于谐波传动的波发生器以及中空式谐波传动减速器.pdf
本发明提供的一种用于谐波传动的波发生器以及中空式谐波传动减速器,涉及减速器技术领域,包括:中轴;中轴具有沿中轴的轴向设置的通孔,且通孔与中轴同轴设置;中轴的外壁还设置有沿中轴的周向环绕一周的凸轮,凸轮与中轴一体成型;凸轮的外壁转动套接有柔性轴承;中轴的外壁还转动套接有第二轴承和第三轴承,第二轴承和第三轴承分别位于柔性轴承的两侧。在上述技术方案中,便在保证简化加工环节、降低成本的基础上,提高了波发生器的刚度,也即提高了整个谐波传动减速器的刚度。另外,为了能够方便的收集线束,即在中轴的轴向设置了中空的通孔,利

镶嵌式谐波传动减速器.pdf
本发明提供了一种镶嵌式谐波传动减速器,其包括波发生器组件、柔轮、固定刚轮和输出刚轮,其中,波发生器组件包括凸轮,凸轮对柔轮产生可控变形,柔轮通过其外齿轮分别与固定刚轮和输出钢轮的内齿轮啮合,还包括壳体,固定钢轮镶嵌入该壳体内,与壳体可拆卸的连接。本发明通过将现有技术中的一体式壳体零件进行拆分,使得非制齿部分的材料比重降低,大大减小了谐波传动减速器的整体重量。
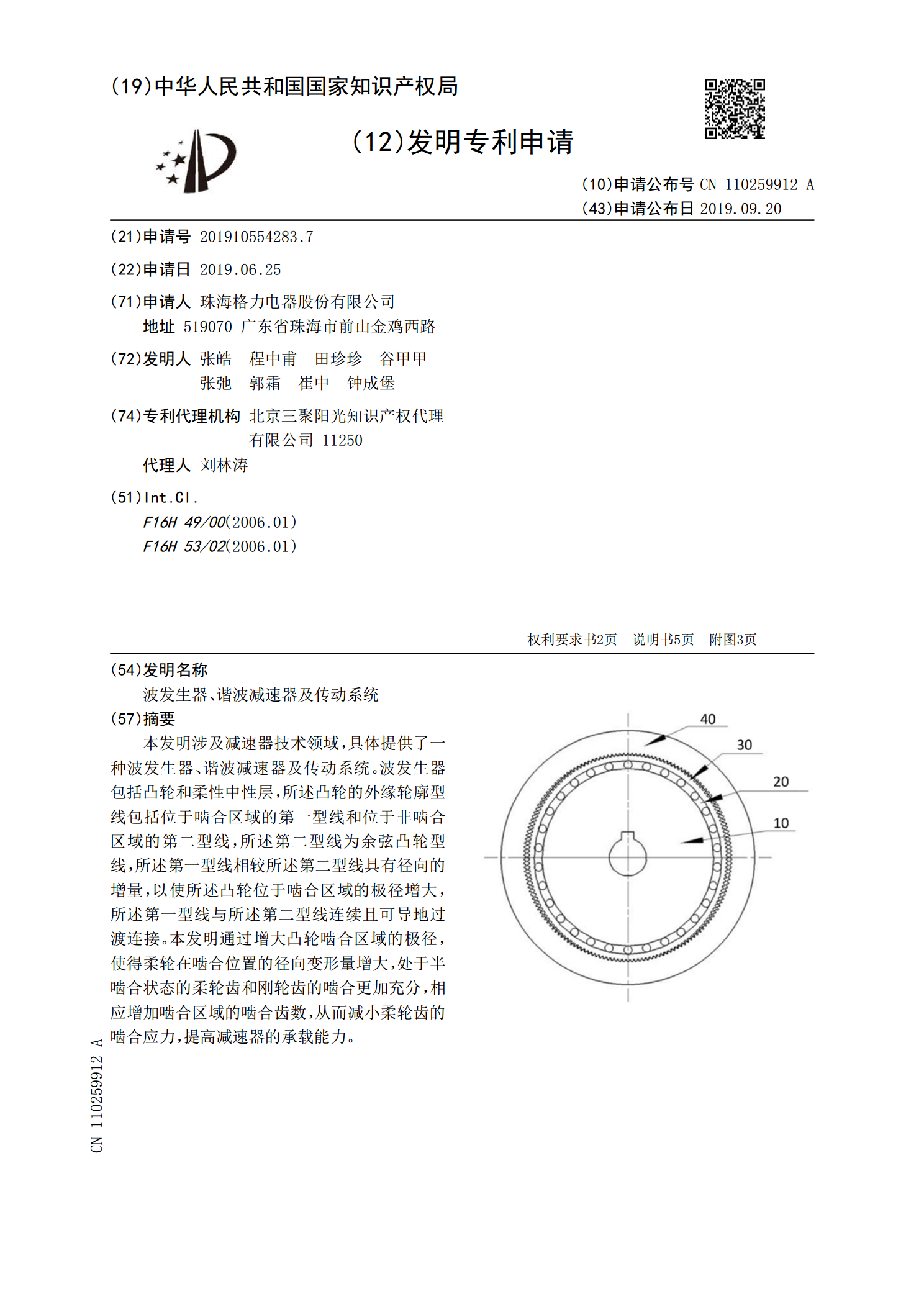
波发生器、谐波减速器及传动系统.pdf
本发明涉及减速器技术领域,具体提供了一种波发生器、谐波减速器及传动系统。波发生器包括凸轮和柔性中性层,所述凸轮的外缘轮廓型线包括位于啮合区域的第一型线和位于非啮合区域的第二型线,所述第二型线为余弦凸轮型线,所述第一型线相较所述第二型线具有径向的增量,以使所述凸轮位于啮合区域的极径增大,所述第一型线与所述第二型线连续且可导地过渡连接。本发明通过增大凸轮啮合区域的极径,使得柔轮在啮合位置的径向变形量增大,处于半啮合状态的柔轮齿和刚轮齿的啮合更加充分,相应增加啮合区域的啮合齿数,从而减小柔轮齿的啮合应力,提高减
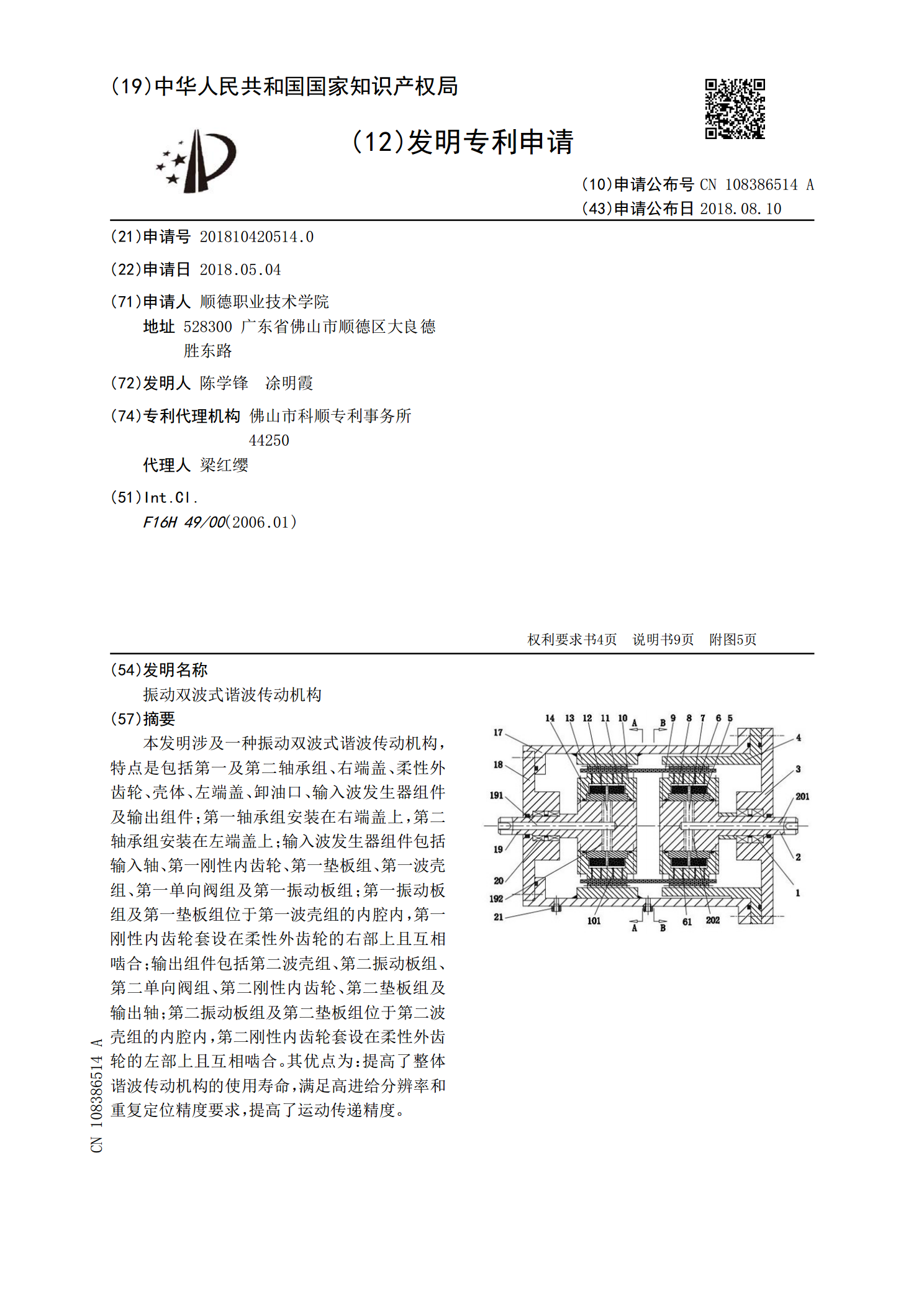
振动双波式谐波传动机构.pdf
本发明涉及一种振动双波式谐波传动机构,特点是包括第一及第二轴承组、右端盖、柔性外齿轮、壳体、左端盖、卸油口、输入波发生器组件及输出组件;第一轴承组安装在右端盖上,第二轴承组安装在左端盖上;输入波发生器组件包括输入轴、第一刚性内齿轮、第一垫板组、第一波壳组、第一单向阀组及第一振动板组;第一振动板组及第一垫板组位于第一波壳组的内腔内,第一刚性内齿轮套设在柔性外齿轮的右部上且互相啮合;输出组件包括第二波壳组、第二振动板组、第二单向阀组、第二刚性内齿轮、第二垫板组及输出轴;第二振动板组及第二垫板组位于第二波壳组的