
一种智能车辆转向机构及其控制方法.pdf

fa****楠吖


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能车辆转向机构及其控制方法.pdf
一种智能车辆转向机构及其控制方法,包括方向盘、扭矩传感器、转向输入轴、模式离合器、蜗轮蜗杆减速机构、转向输出轴、旋转编码器、电动机、安全离合器、转向齿轮、转向齿条、控制器;方向盘经扭矩传感器与转向输入轴相连;方向盘经扭矩传感器与转向输入轴相连;转向输入轴经模式离合器与蜗轮蜗杆减速机构中的蜗杆相连接,电动机的输出轴经安全离合器与蜗轮蜗杆减速机构中的蜗轮相连接;无人驾驶时,控制器选择位置伺服控制方法,实现了无人驾驶自动控制模式的精准角度和角速度控制;人工控制时,控制器选择力矩控制方法,实现了人工控制模式的良好
一种农用履带车辆转向机构及其转向控制方法.pdf
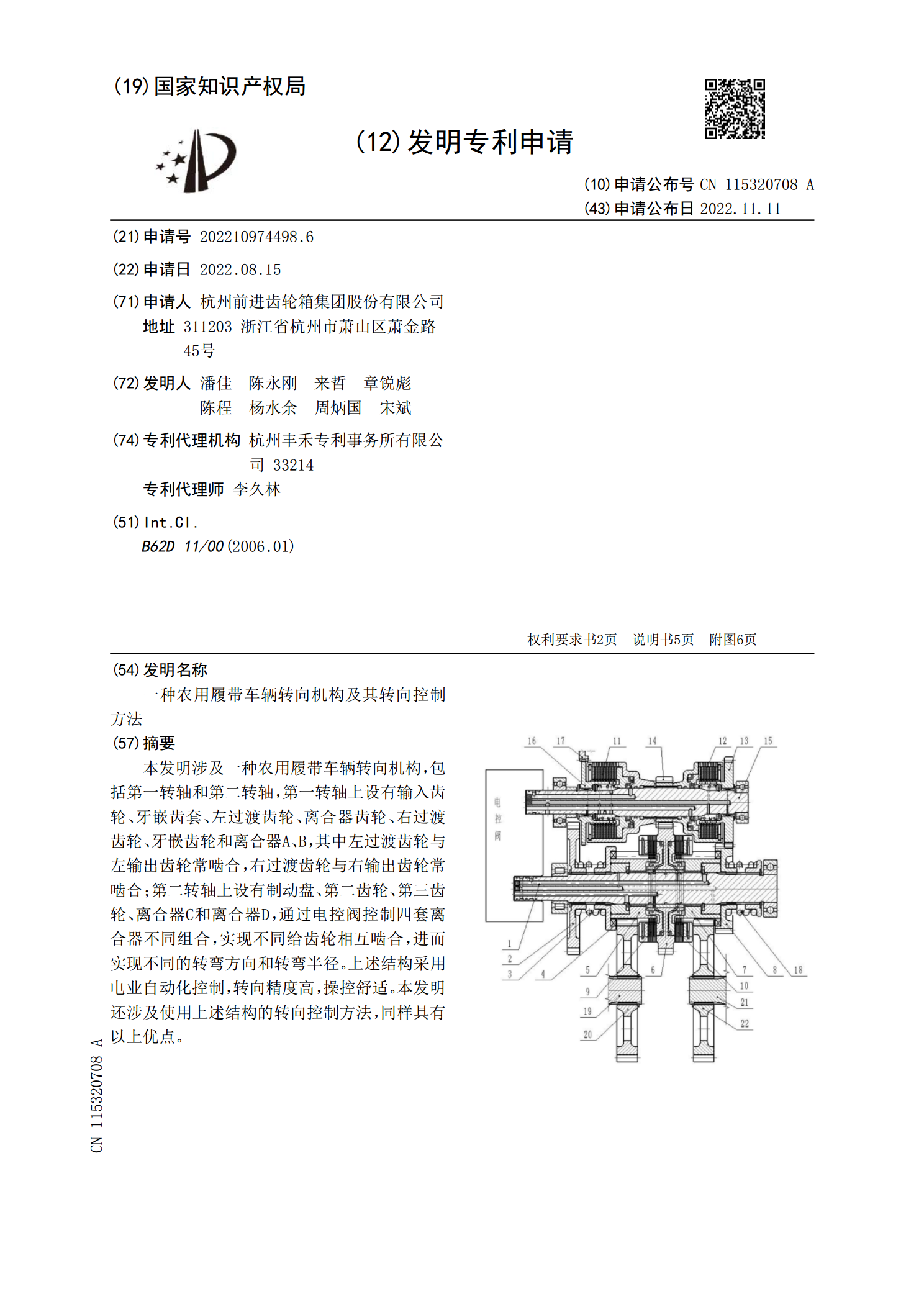
本发明涉及一种农用履带车辆转向机构,包括第一转轴和第二转轴,第一转轴上设有输入齿轮、牙嵌齿套、左过渡齿轮、离合器齿轮、右过渡齿轮、牙嵌齿轮和离合器A、B,其中左过渡齿轮与左输出齿轮常啮合,右过渡齿轮与右输出齿轮常啮合;第二转轴上设有制动盘、第二齿轮、第三齿轮、离合器C和离合器D,通过电控阀控制四套离合器不同组合,实现不同给齿轮相互啮合,进而实现不同的转弯方向和转弯半径。上述结构采用电业自动化控制,转向精度高,操控舒适。本发明还涉及使用上述结构的转向控制方法,同样具有以上优点。

一种车辆及其转向机构.pdf
本申请公开了一种车辆及其转向机构,其中转向机构包括立杆、把手、将立杆和把手转动连接的转动组件,所述转动组件包括轴套、与轴套配合使用的转轴和套设于转轴上的第一扭簧和第二扭簧,第一扭簧与第二扭簧的一端直接或间接的固定在转轴或轴套上,另一端直接或间接的对应固定在轴套或转轴上,第一扭簧和第二扭簧分别为左旋和右旋,第一扭簧和/或第二扭簧自身的两扭臂之间的初始角度,大于安装后的扭臂两端固定位置之间的角度。通过设置第一扭簧、第二扭簧结构及其位置的设置,实现了双向转向复位功能,并可以在安装时预紧两扭簧,克服了把手在初始位

带有转向限制机构的车辆和车辆的转向控制方法.pdf
一种车辆,包括:行走机构;转向机构,控制所述行走机构的行进方向;转向限制启动机构;以及转向限制机构,其中,所述转向限制启动机构致动所述转向限制机构以限制行驶中的所述车辆的转向。有利地,所述行走机构包括左侧驱动轮和右侧驱动轮;所述转向限制机构通过调节两侧驱动轮的旋转速度差控制所述行走机构相对于当前行进方向的转向角度。
一种智能辅助转向系统及其控制方法.pdf
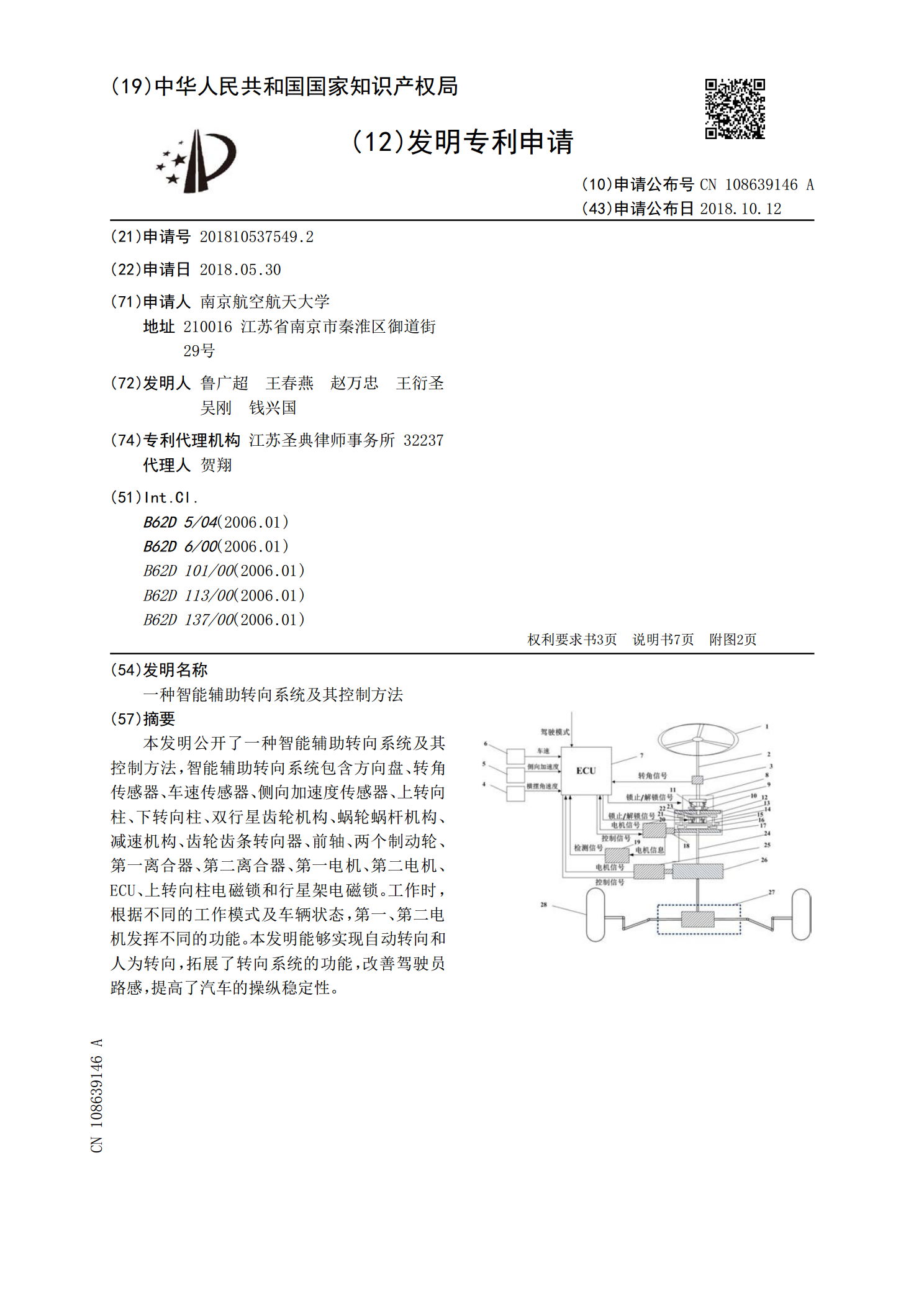
本发明公开了一种智能辅助转向系统及其控制方法,智能辅助转向系统包含方向盘、转角传感器、车速传感器、侧向加速度传感器、上转向柱、下转向柱、双行星齿轮机构、蜗轮蜗杆机构、减速机构、齿轮齿条转向器、前轴、两个制动轮、第一离合器、第二离合器、第一电机、第二电机、ECU、上转向柱电磁锁和行星架电磁锁。工作时,根据不同的工作模式及车辆状态,第一、第二电机发挥不同的功能。本发明能够实现自动转向和人为转向,拓展了转向系统的功能,改善驾驶员路感,提高了汽车的操纵稳定性。