
机器人自动充电系统及其充电方法.pdf

阳炎****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人自动充电系统及其充电方法.pdf
本发明公开了一种机器人自动充电系统,它包括安装在充电室内的导轨和充电极片,导轨上设有导向轮,导向轮指引机器人车轮的移动,每个导轨上还安装相应交流充电座,交流充电座与交流市电的零线和火线连接,充电极片安装在机器人底盘上,所述充电极片依次与充电控制模块、整流模块、充电电池连接,并公开了一种基于本装置的机器人自动充电方法,本发明中的充电系统采用导轨引导机器人运动,保证了机器人停靠位置和姿态的精度;采用交流市电供电,充电座安装在导轨上,不需要外置直流整流装置,系统结构简单;由于采用交流市电供电,电压等级高,可以对
充电桩的自动充电处理方法及其装置.pdf
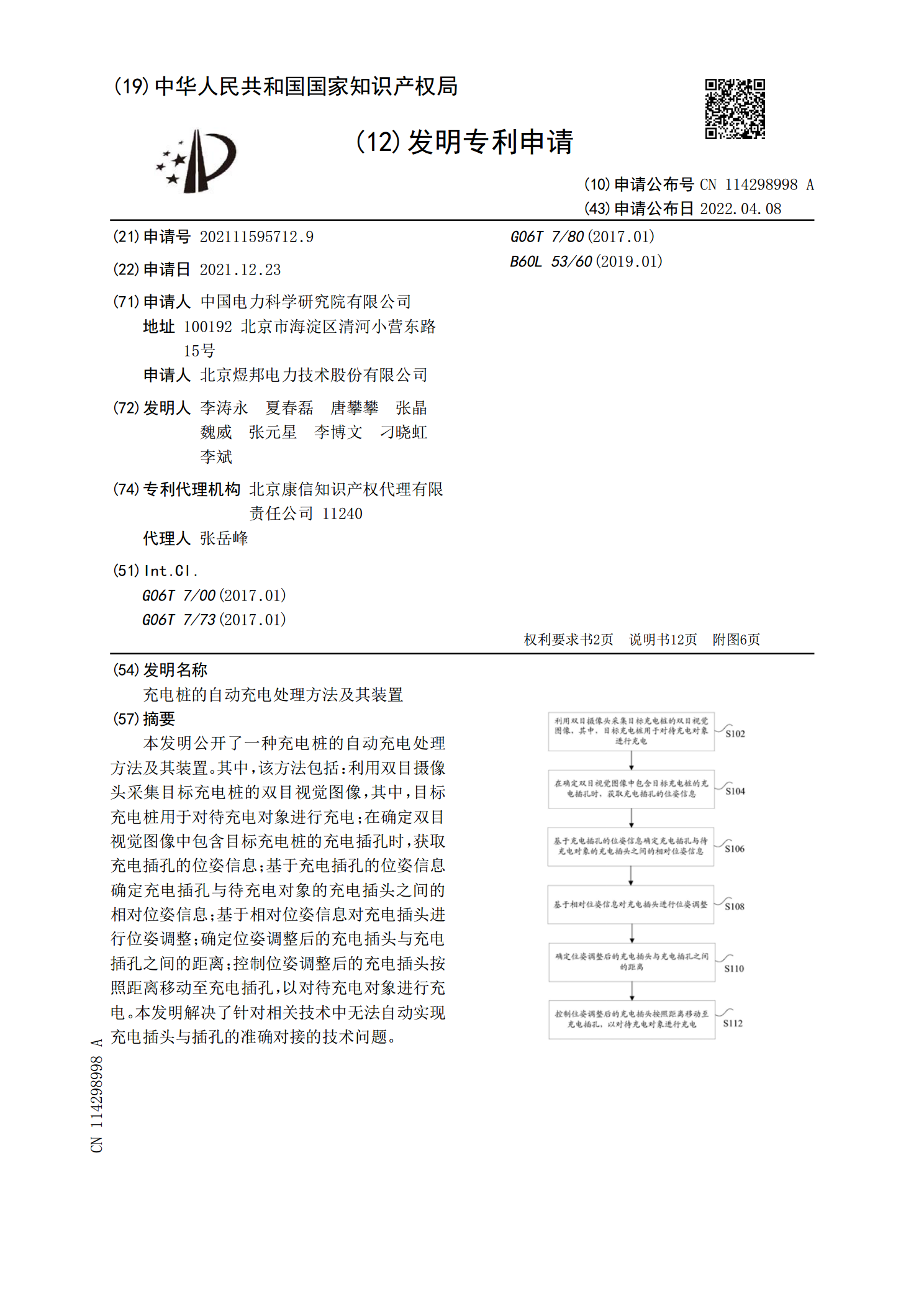
本发明公开了一种充电桩的自动充电处理方法及其装置。其中,该方法包括:利用双目摄像头采集目标充电桩的双目视觉图像,其中,目标充电桩用于对待充电对象进行充电;在确定双目视觉图像中包含目标充电桩的充电插孔时,获取充电插孔的位姿信息;基于充电插孔的位姿信息确定充电插孔与待充电对象的充电插头之间的相对位姿信息;基于相对位姿信息对充电插头进行位姿调整;确定位姿调整后的充电插头与充电插孔之间的距离;控制位姿调整后的充电插头按照距离移动至充电插孔,以对待充电对象进行充电。本发明解决了针对相关技术中无法自动实现充电插头与插
轮椅车的自动无线充电方法及其系统.pdf
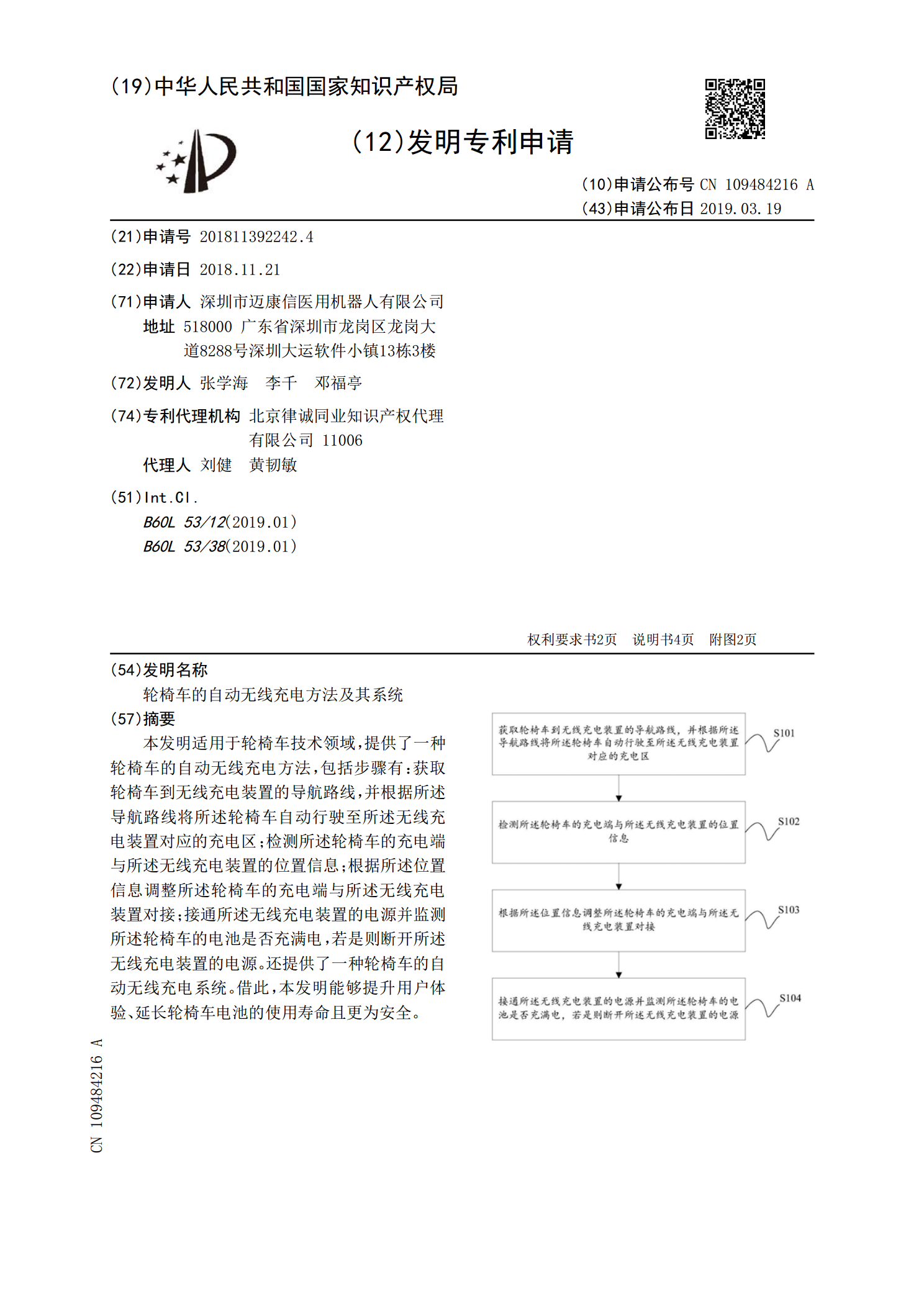
本发明适用于轮椅车技术领域,提供了一种轮椅车的自动无线充电方法,包括步骤有:获取轮椅车到无线充电装置的导航路线,并根据所述导航路线将所述轮椅车自动行驶至所述无线充电装置对应的充电区;检测所述轮椅车的充电端与所述无线充电装置的位置信息;根据所述位置信息调整所述轮椅车的充电端与所述无线充电装置对接;接通所述无线充电装置的电源并监测所述轮椅车的电池是否充满电,若是则断开所述无线充电装置的电源。还提供了一种轮椅车的自动无线充电系统。借此,本发明能够提升用户体验、延长轮椅车电池的使用寿命且更为安全。
无线充电接收装置、无线充电系统及其充电控制方法.pdf
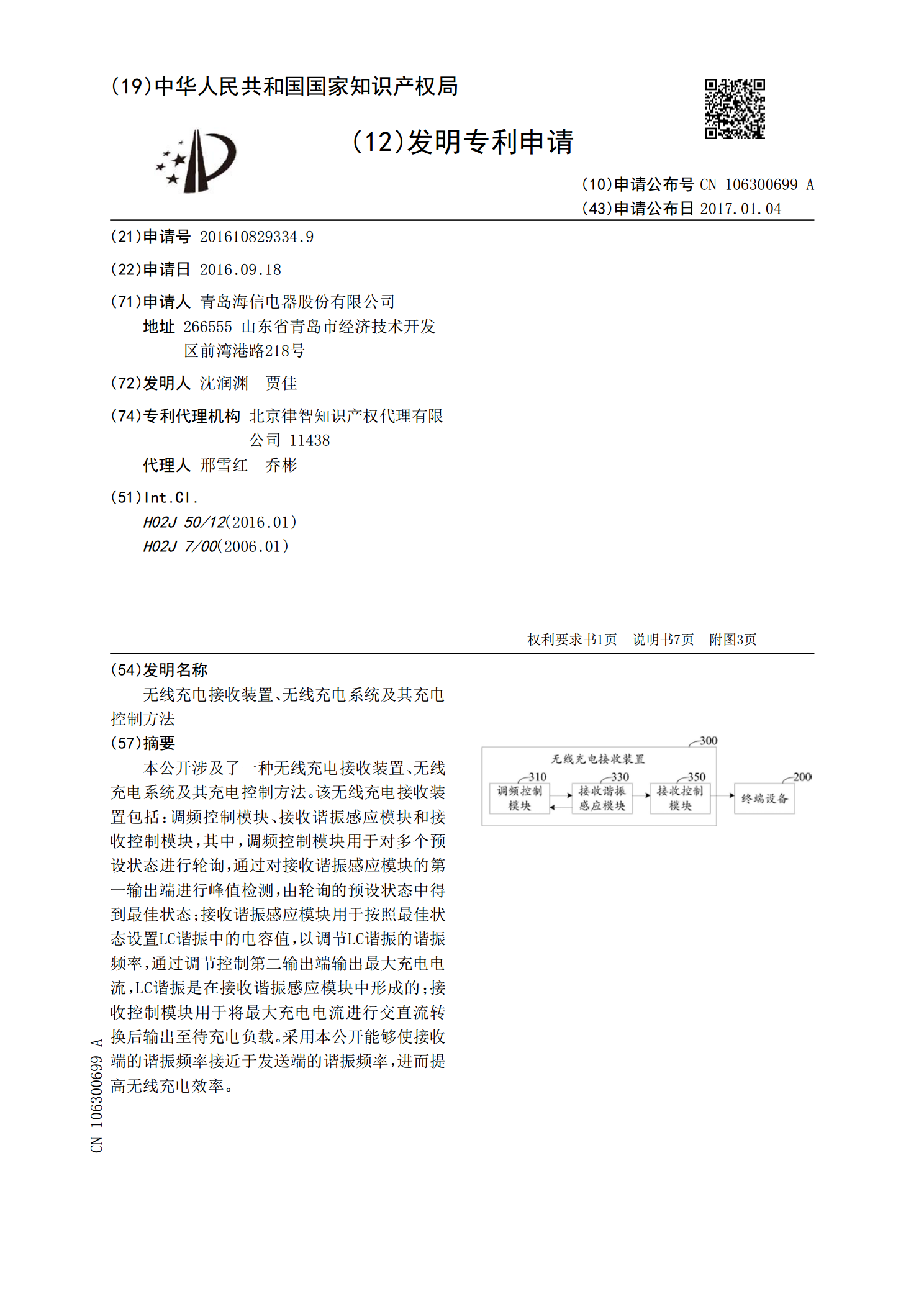
本公开涉及了一种无线充电接收装置、无线充电系统及其充电控制方法。该无线充电接收装置包括:调频控制模块、接收谐振感应模块和接收控制模块,其中,调频控制模块用于对多个预设状态进行轮询,通过对接收谐振感应模块的第一输出端进行峰值检测,由轮询的预设状态中得到最佳状态;接收谐振感应模块用于按照最佳状态设置LC谐振中的电容值,以调节LC谐振的谐振频率,通过调节控制第二输出端输出最大充电电流,LC谐振是在接收谐振感应模块中形成的;接收控制模块用于将最大充电电流进行交直流转换后输出至待充电负载。采用本公开能够使接收端的谐

一种充电器的自动调档充电方法及其充电及检测电路.pdf
本发明公开了一种充电器的自动调档充电方法及其充电及检测电路,该充电及检测电路装接在充电器中,它包括控制器、PWM充电模块、电流检测模块、电压检测模块和显示模块。该充电方法包括步骤(1)将充电电池置入充电器座中;步骤(2)判断该充电电池是否适用该充电器;步骤(3)调整与该充电电池相适配的充电电流档;步骤(4)该充电及检测电路根据与该充电电池相适配的充电电流档对电流输出进行精确控制并对该充电电池进行持续充电。它具有如下优点:实现快速充电,延长电池使用寿命,充分利用该类电池。