
车体主动平衡减震系统及控制方法.pdf

书生****瑞梦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车体主动平衡减震系统及控制方法.pdf
本发明公开了一种车体主动平衡减震系统,包括液压泵、设置在车架与车轮之间的减震装置、和控制所述各减震装置的电磁阀;所述减震装置包括与车轮连接的阻尼缸、套设在阻尼缸中并与阻尼缸中阻尼活塞连接的平衡缸、套设在平衡缸中并与车架连接的平衡活塞、套设并连接于所述阻尼缸和平衡缸之间的减震弹簧;还包括控制平衡缸动作的控制系统;所述控制系统包括控制器;连接到控制器并传递离地间隙信号的高度传感器;连接到控制器并传递车辆行驶速度信号的速度传感器;和连接到控制器并传递车身水平信号的水平传感器;在所述控制器中预设有至少一个速度阈值

分布式电动汽车的主动减震系统以及主动减震方法.pdf
本发明公开一种分布式电动汽车的主动减震系统,应用于汽车控制系统,所述主动减震系统包括:信息采集装置,一一对应地设置于分布式电动汽车的每个轮胎前方,用于获取所述每个轮胎前方的路面信息;分析装置,用于基于所述路面信息生成与所述每个轮胎一一对应的震动信息;减震装置,一一对应的设置于所述分布式电动汽车的每个轮胎与悬架之间,用于基于所述震动信息,控制与所述震动信息对应的轮胎对路面进行主动减震。还公开一种分布式电动汽车的主动减震方法。本发明的系统和方法降低了电动汽车的制造及使用成本、简化了电动汽车的控制复杂度,提升了

拖拉机及农机具主动减震控制方法、系统及拖拉机.pdf
本发明涉及农机减震技术领域,公开了一种拖拉机及农机具主动减震控制方法、系统及拖拉机。方法包括:实时获取车头前方的超声波信号,根据超声波信号获得车头前方预设距离处的路面谱曲线;根据车辆速度、前轮轴距离车头最前端的距离、前后轮轴距以及农机具轮轴与前轮轴的距离,分别确定前轮、后轮和农机具轮到达所述路面谱曲线上各点所需时间;按照路面谱曲线在到达相应时间时,分别向前轮、后轮和/或农机具的阻尼系统发送减震控制指令。本发明可对拖拉机前轮、后轮和农机轮主动施加减震措施,有效保护农机具并延长使用寿命,还可以提升驾驶员的工作
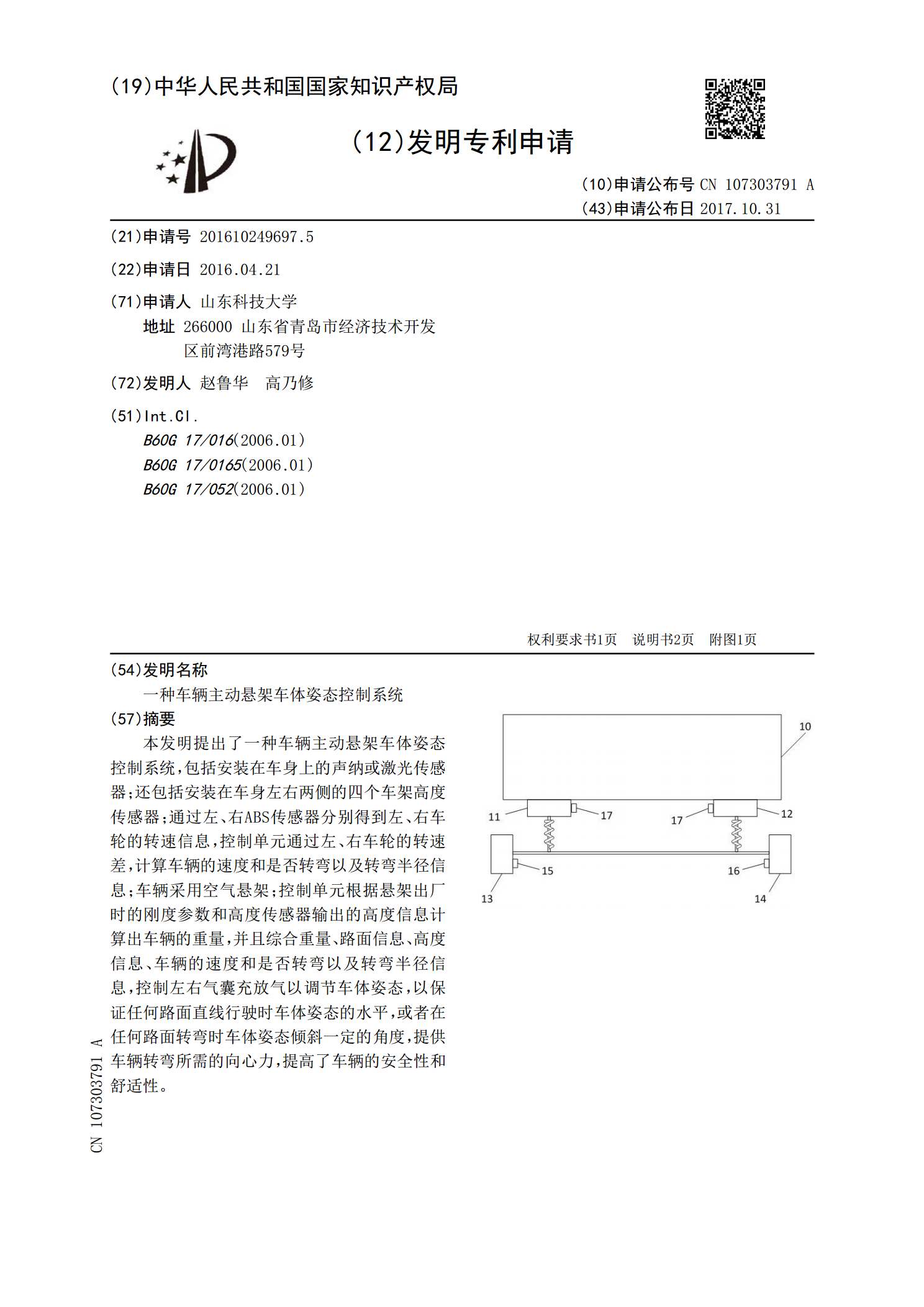
一种车辆主动悬架车体姿态控制系统.pdf
本发明提出了一种车辆主动悬架车体姿态控制系统,包括安装在车身上的声纳或激光传感器;还包括安装在车身左右两侧的四个车架高度传感器;通过左、右ABS传感器分别得到左、右车轮的转速信息,控制单元通过左、右车轮的转速差,计算车辆的速度和是否转弯以及转弯半径信息;车辆采用空气悬架;控制单元根据悬架出厂时的刚度参数和高度传感器输出的高度信息计算出车辆的重量,并且综合重量、路面信息、高度信息、车辆的速度和是否转弯以及转弯半径信息,控制左右气囊充放气以调节车体姿态,以保证任何路面直线行驶时车体姿态的水平,或者在任何路面转
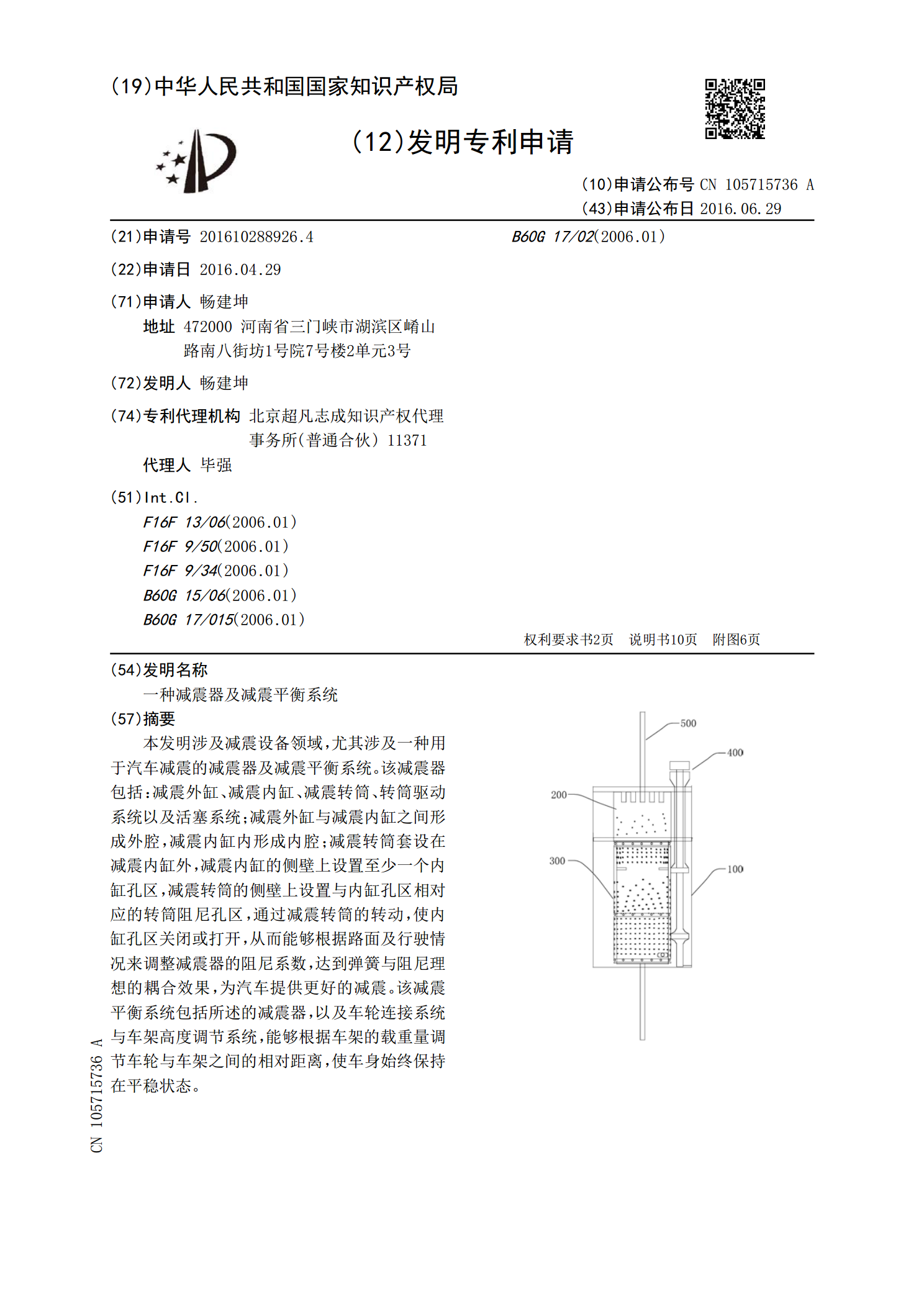
一种减震器及减震平衡系统.pdf
本发明涉及减震设备领域,尤其涉及一种用于汽车减震的减震器及减震平衡系统。该减震器包括:减震外缸、减震内缸、减震转筒、转筒驱动系统以及活塞系统;减震外缸与减震内缸之间形成外腔,减震内缸内形成内腔;减震转筒套设在减震内缸外,减震内缸的侧壁上设置至少一个内缸孔区,减震转筒的侧壁上设置与内缸孔区相对应的转筒阻尼孔区,通过减震转筒的转动,使内缸孔区关闭或打开,从而能够根据路面及行驶情况来调整减震器的阻尼系数,达到弹簧与阻尼理想的耦合效果,为汽车提供更好的减震。该减震平衡系统包括所述的减震器,以及车轮连接系统与车架高