
一种空间交错轴齿轮机构.pdf

是湛****21


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种空间交错轴齿轮机构.pdf
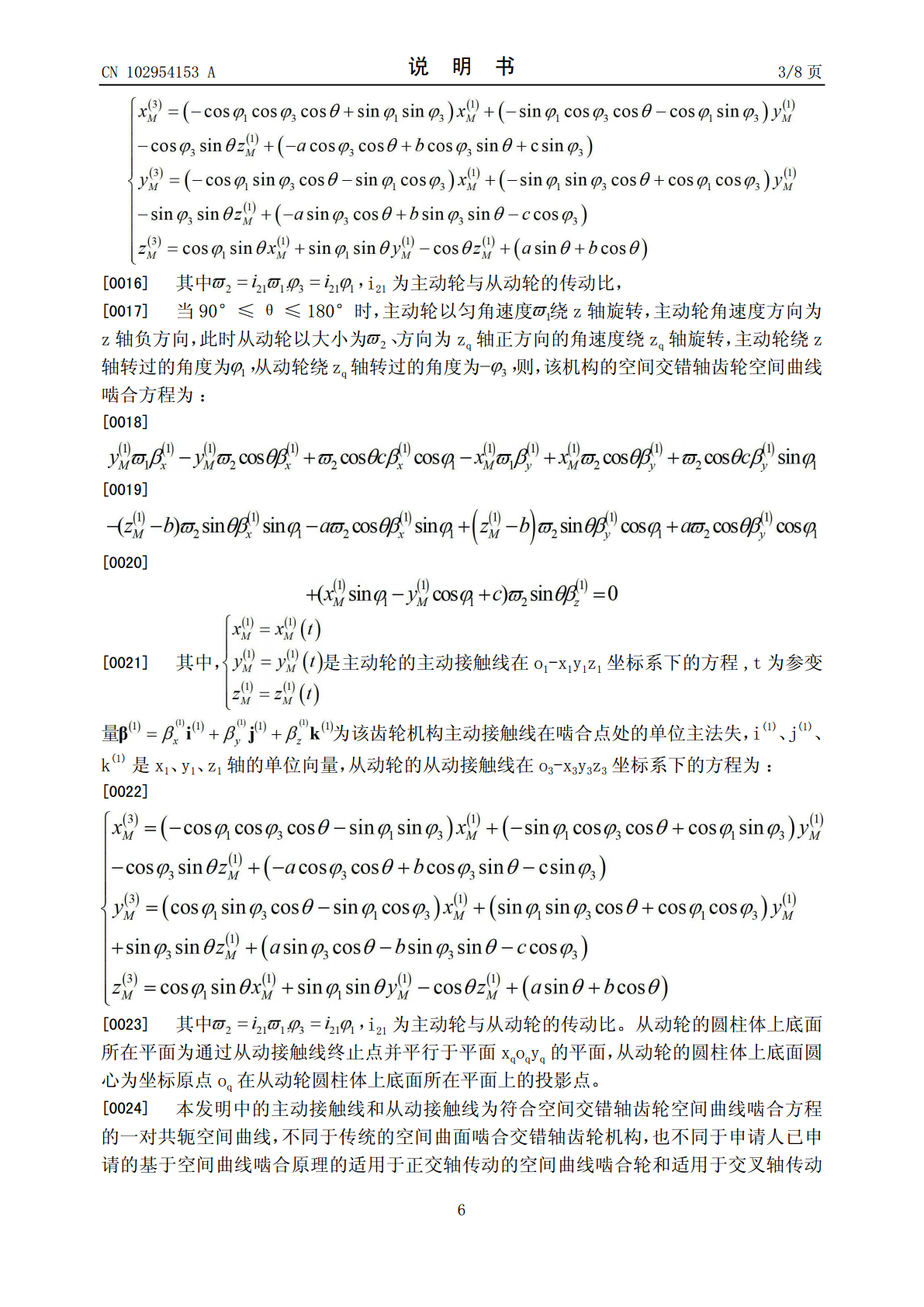
本发明涉及一种空间交错轴齿轮机构,该机构包括主动轮、从动轮、主动钩杆和从动钩杆,主动钩杆均匀布置在主动轮端部圆柱体上底面的圆周上,从动钩杆均匀布置在从动轮端部圆柱体侧面的圆周上,主动轮和从动轮组成一对传动副,主动轮轴线和从动轮轴线间交错角为0°~180°中的任意值。本发明通过主动钩杆和从动钩杆上的主动接触线和从动接触线间的点接触啮合,实现该空间交错轴齿轮机构的平稳传动。本发明可以实现类似蜗轮蜗杆机构的大传动比传动;且两个轮轴位于不同的平面,两轴之间的交错角可为0°~180°中的任意角度值;该机构同时具有结

空间交错轴螺旋齿轮传动自行车.pdf
一种空间交错轴螺旋齿轮传动自行车,包括中轴、后轴、飞轮,中轴齿轮外壳内设置一对啮合的主动螺旋齿轮和从动螺旋齿轮,主动螺旋齿轮套置在中轴上,从动螺旋齿轮与传动轴相连,传动轴的另一端放置在后轴齿轮外壳内,传动轴的端部与后主动螺旋齿轮相连,后轴齿轮外壳内与后主动螺旋齿轮相啮合的后从动螺旋齿轮套置在后轴上,后轴通过滚针与后从动螺旋齿轮连接,安装在后轴上的飞轮通过其上的齿轮与拨盘啮合,拨盘套在后从动螺旋齿轮上并与之固接。本发明的空间交错轴螺旋齿轮传动自行车,动力的传动采用传动轴及两对相啮合的螺旋齿轮,重叠系数大,运

基于交错轴斜齿轮螺母旋紧机构的圆法兰连接装置.pdf
本发明提供了一种基于交错轴斜齿轮螺母旋紧机构的圆法兰连接装置,用于连接第一圆法兰和第二圆法兰;所述连接装置包括压环螺母、蜗杆、蜗杆固定架以及设置在第一圆法兰外侧面上的外螺纹;所述压环螺母的内侧面设置有内螺纹、外侧面设置有斜齿、一个端部设置有压环;所述压环螺母套装在第一圆法兰和第二圆法兰外,压环螺母的内螺纹与第一圆法兰的外螺纹配合构成螺旋副;所述蜗杆固定架与第二圆法兰固连;所述蜗杆通过蜗杆固定架安装在压环螺母外侧,蜗杆与压环螺母的斜齿轮配合构成交错轴斜齿轮传动副;所述压环用于压紧第二圆法兰的法兰面。利用本发

空间交错轴等角速传动RCCR双曲柄机构的分析.docx
空间交错轴等角速传动RCCR双曲柄机构的分析标题:空间交错轴等角速传动RCCR双曲柄机构的分析摘要:本文对空间交错轴等角速传动RCCR(Rolling-Craft-Craft-Roller)双曲柄机构进行了详细分析。首先介绍了双曲柄机构的基本概念和工作原理,然后对RCCR机构的结构和运动特性进行了分析,包括构件间的关系、转动速度和力矩分析等。通过建立运动学和力学模型,并进行仿真计算,验证了该机构的可行性和稳定性。最后,对该机构在工程领域的应用进行了展望。1.引言随着机械传动系统的不断发展,追求更高效、更紧

斜齿轮—非圆锥齿轮交错轴行星轮系钵苗宽窄行移栽机构.pdf
本发明公开了一种斜齿轮—非圆锥齿轮交错轴行星轮系钵苗宽窄行移栽机构。现有水稻钵苗宽窄行移栽机构的秧针取秧时侧向偏移量大,取苗位置不准确,取苗率很低。本发明中两个行星轮系对称设置在中心轴两端,行星轮系采用四级齿轮副传动,第一级为交错轴的圆柱斜齿轮副,第二、三、四级为非圆锥齿轮副。本发明的行星轮系可实现取秧爪在取苗后,插秧点相对于取秧点侧向偏移,实现钵苗宽窄行种植,有利于取秧爪形成“8”字形的空间运动轨迹,相比两级齿轮传动,取秧时的轨迹侧向偏移量最小可达1.8mm,取秧爪为“直取苗”姿态,保证取苗成功率。同时