
一种准双曲面锥齿轮传动装置.pdf

猫巷****婉慧


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种准双曲面锥齿轮传动装置.pdf
本发明公开了一种准双曲面锥齿轮传动装置,包括两套准双曲面锥齿轮副、一套直齿锥齿轮副、两套直齿轮副、以及机械连接部分,准双曲面锥齿轮副由准双曲面小锥齿轮和准双曲面大锥齿轮组成,直齿锥齿轮副由小直齿锥齿轮和大直齿锥齿轮组成,直齿轮副由多个不同齿数齿轮构成,实现变位变速功能。机械连接部分主要由多个法兰盘组成,本发明可实现传动装置的大扭矩、高精度、小型化,还可实现伺服电机扭矩方向的改变,应用在机器人末端关节传动,可明显减小其体积,提高其精度。

锥齿轮和准双曲面齿轮及其制造方法.pdf
本发明涉及锥齿轮和准双曲面齿轮及其制造方法,具体地,在包括机动车应用的动力传输中使用的锥齿轮和准双曲面齿轮。提供一种具有大致环形齿轮体的净形锥齿轮或准双曲面齿轮,所述大致环形齿轮体包括从由粉末金属制成的大致环形坯形成的多个径向向外延伸的齿轮齿。另外,提供一种制造净形锥齿轮或准双曲面齿轮的方法,其包括下列步骤:提供且可选地热处理由金属粉末制成的大致环状坯或环形坯,然后通过轨道地成形或滚压成形来逐渐变形坯,以产生具有多个向外延伸的齿轮齿的净形齿轮部件,净形齿轮部件可以是锥齿型或准双曲面型。
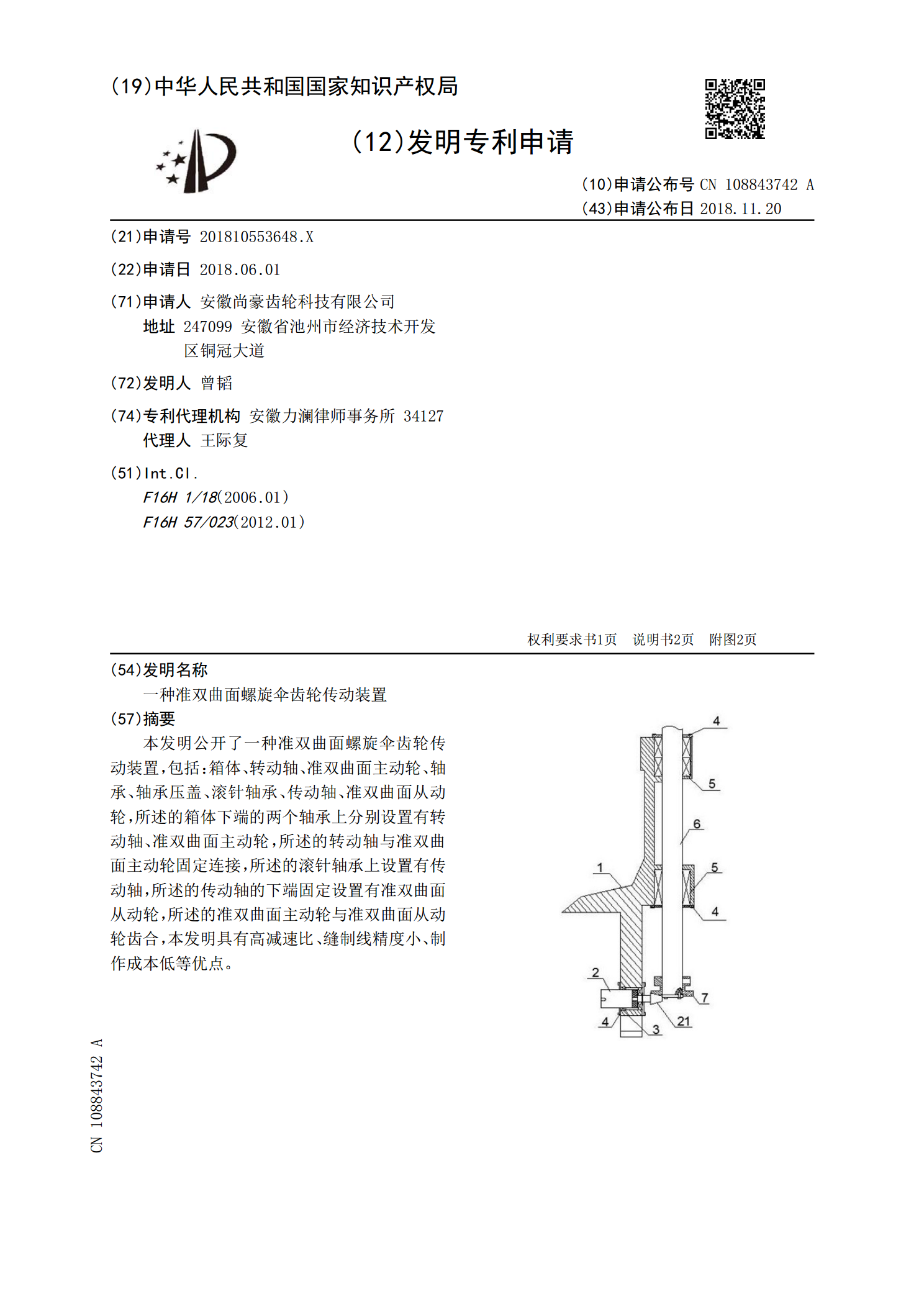
一种准双曲面螺旋伞齿轮传动装置.pdf
本发明公开了一种准双曲面螺旋伞齿轮传动装置,包括:箱体、转动轴、准双曲面主动轮、轴承、轴承压盖、滚针轴承、传动轴、准双曲面从动轮,所述的箱体下端的两个轴承上分别设置有转动轴、准双曲面主动轮,所述的转动轴与准双曲面主动轮固定连接,所述的滚针轴承上设置有传动轴,所述的传动轴的下端固定设置有准双曲面从动轮,所述的准双曲面主动轮与准双曲面从动轮齿合,本发明具有高减速比、缝制线精度小、制作成本低等优点。

螺旋锥齿轮和准双曲面齿轮的顶锥元素的优化.pdf
一种确定用于螺旋锥齿轮和准双曲线齿轮的优化顶锥元素的方法。确定齿轮副的一个构件的齿根圆角的形状且将该形状转换为齿轮副的另一构件的齿顶。用本发明的方法,优化齿根-齿顶间隙并使重合度最大,同时避免匹配齿轮构件之间的齿根-齿顶干涉。
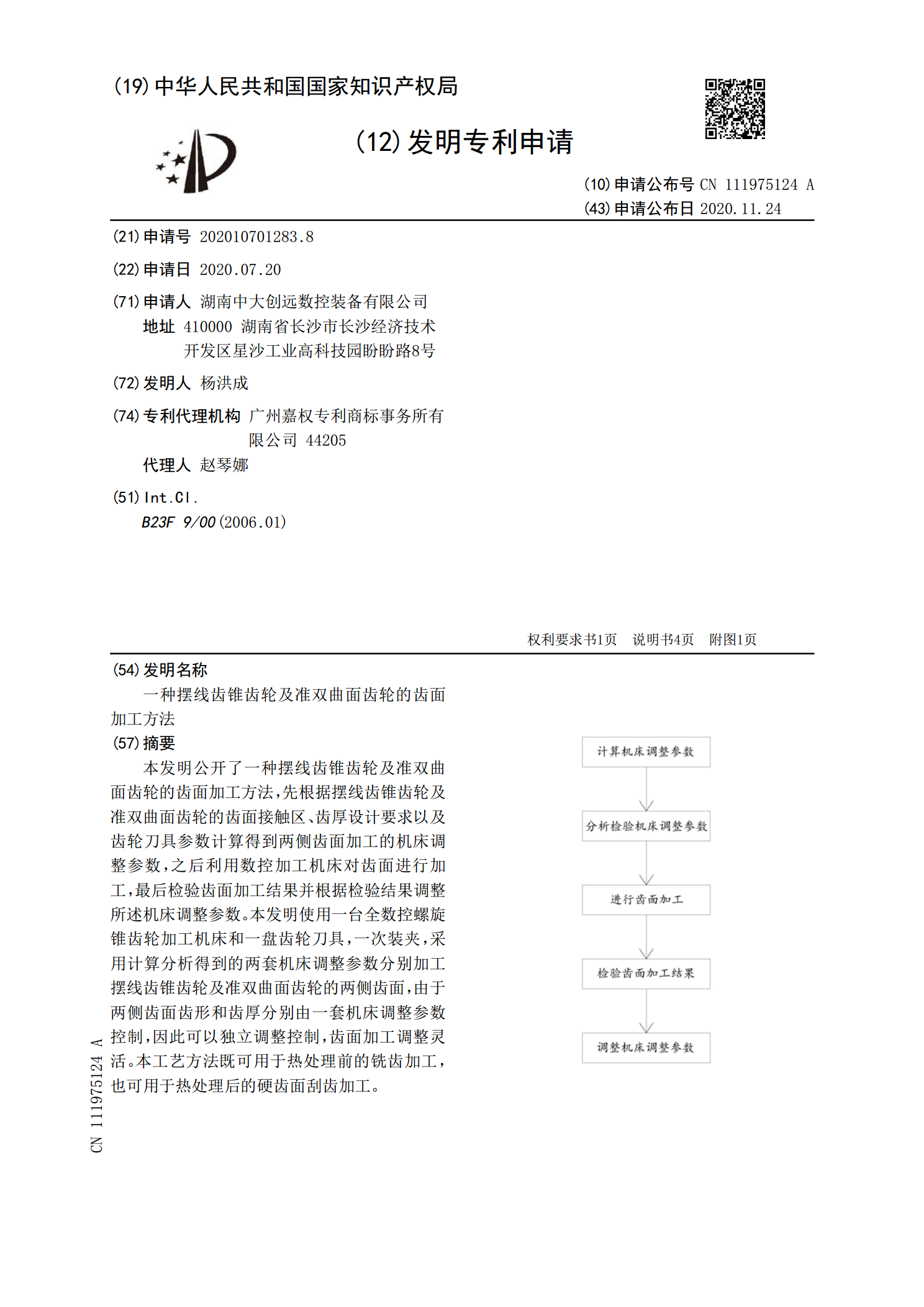
一种摆线齿锥齿轮及准双曲面齿轮的齿面加工方法.pdf
本发明公开了一种摆线齿锥齿轮及准双曲面齿轮的齿面加工方法,先根据摆线齿锥齿轮及准双曲面齿轮的齿面接触区、齿厚设计要求以及齿轮刀具参数计算得到两侧齿面加工的机床调整参数,之后利用数控加工机床对齿面进行加工,最后检验齿面加工结果并根据检验结果调整所述机床调整参数。本发明使用一台全数控螺旋锥齿轮加工机床和一盘齿轮刀具,一次装夹,采用计算分析得到的两套机床调整参数分别加工摆线齿锥齿轮及准双曲面齿轮的两侧齿面,由于两侧齿面齿形和齿厚分别由一套机床调整参数控制,因此可以独立调整控制,齿面加工调整灵活。本工艺方法既可用