
一种管外防腐机器人的设计与分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种管外防腐机器人的设计与分析.docx
一种管外防腐机器人的设计与分析近年来,随着管道类型的多样化及特殊环境需求,管道腐蚀防护已成为管道安全运行的重要保障。而传统管道防腐技术存在效果不理想、周期长、可能存在人身安全等问题。因此,设计一种管外防腐机器人是十分必要的。一、机器人的设计1.机器人的功能及要求防腐机器人主要用于清洗和喷涂管道外侧的防腐涂料。机器人应具有以下功能和要求:(1)清洗功能。机器人应能根据环境特点,选择合适的清洗液,清洗管道表面的污垢,保证管道表面的清洁度符合防腐涂料的要求。(2)喷涂功能。机器人应能够制定合适的喷涂方案,根据管

一种Himaya管外3PE防腐设备.pdf
本发明属于一种Himaya管外3PE防腐设备,包括传送带,所述传送带通过表面两侧的凹槽结构与内部的支撑架进行连接,且支撑架两侧设置的固定块贴合在传送带通过表面两侧的凹槽结构表面,所述支撑架的上端表面设置有安全台架,且安全台架的上端表面贴合连接有转杆,所述连接台的两侧内部连接有钢管支撑架,且钢管支撑架设置有传送机与两侧的支撑架进行连接。该Himaya管外3PE防腐设备将对钢管生产加工的所有手续均通过传送带传送来一次性完成,不需要人工一步一步来完成,这样比较节省时间和精力,节省生产成本,而且可以准确的对钢管的
一种新型管外行走机器人.pdf
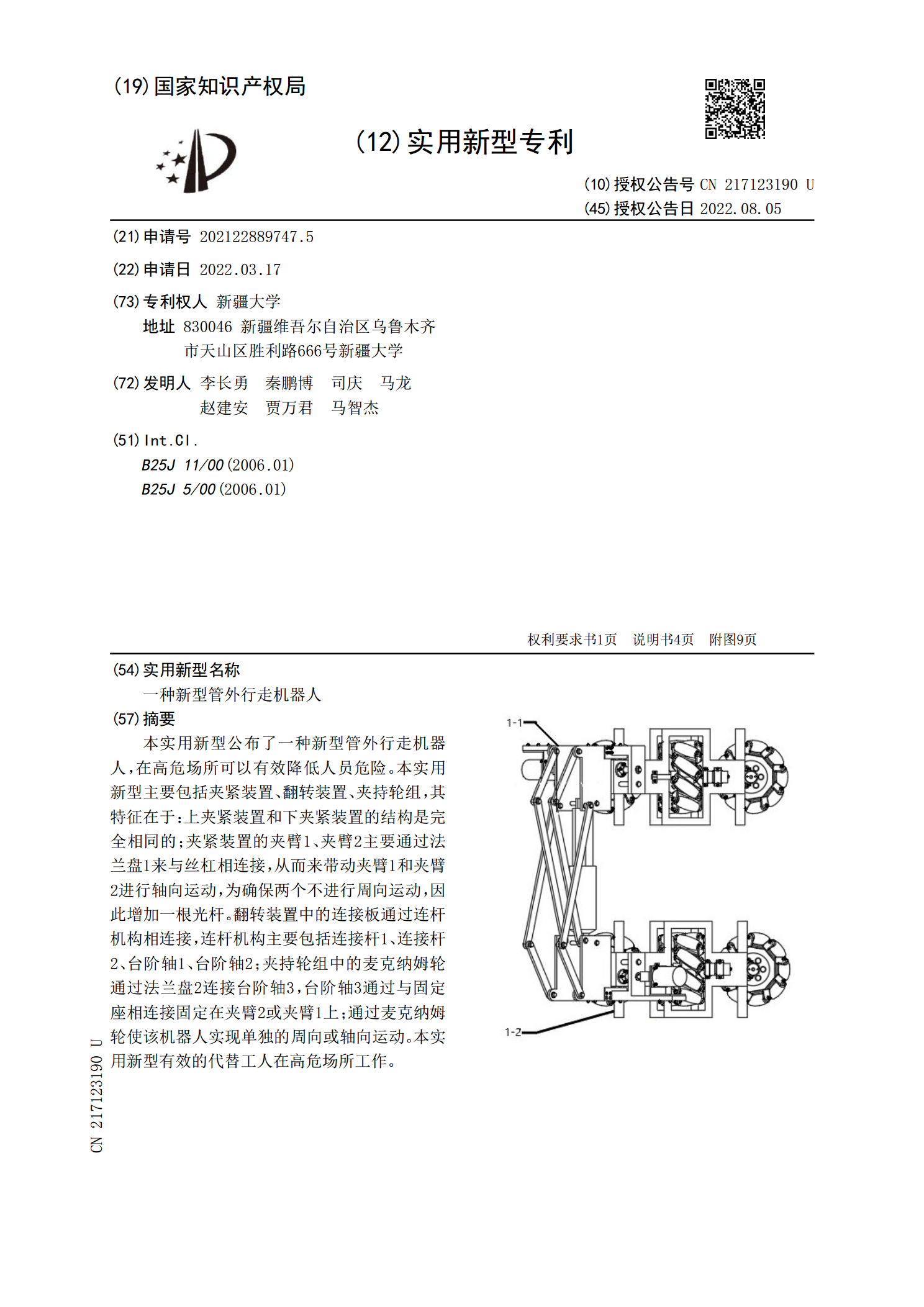
本实用新型公布了一种新型管外行走机器人,在高危场所可以有效降低人员危险。本实用新型主要包括夹紧装置、翻转装置、夹持轮组,其特征在于:上夹紧装置和下夹紧装置的结构是完全相同的;夹紧装置的夹臂1、夹臂2主要通过法兰盘1来与丝杠相连接,从而来带动夹臂1和夹臂2进行轴向运动,为确保两个不进行周向运动,因此增加一根光杆。翻转装置中的连接板通过连杆机构相连接,连杆机构主要包括连接杆1、连接杆2、台阶轴1、台阶轴2;夹持轮组中的麦克纳姆轮通过法兰盘2连接台阶轴3,台阶轴3通过与固定座相连接固定在夹臂2或夹臂1上;通过麦
一种连续管外表面单层PE防腐生产线及防腐工艺.pdf
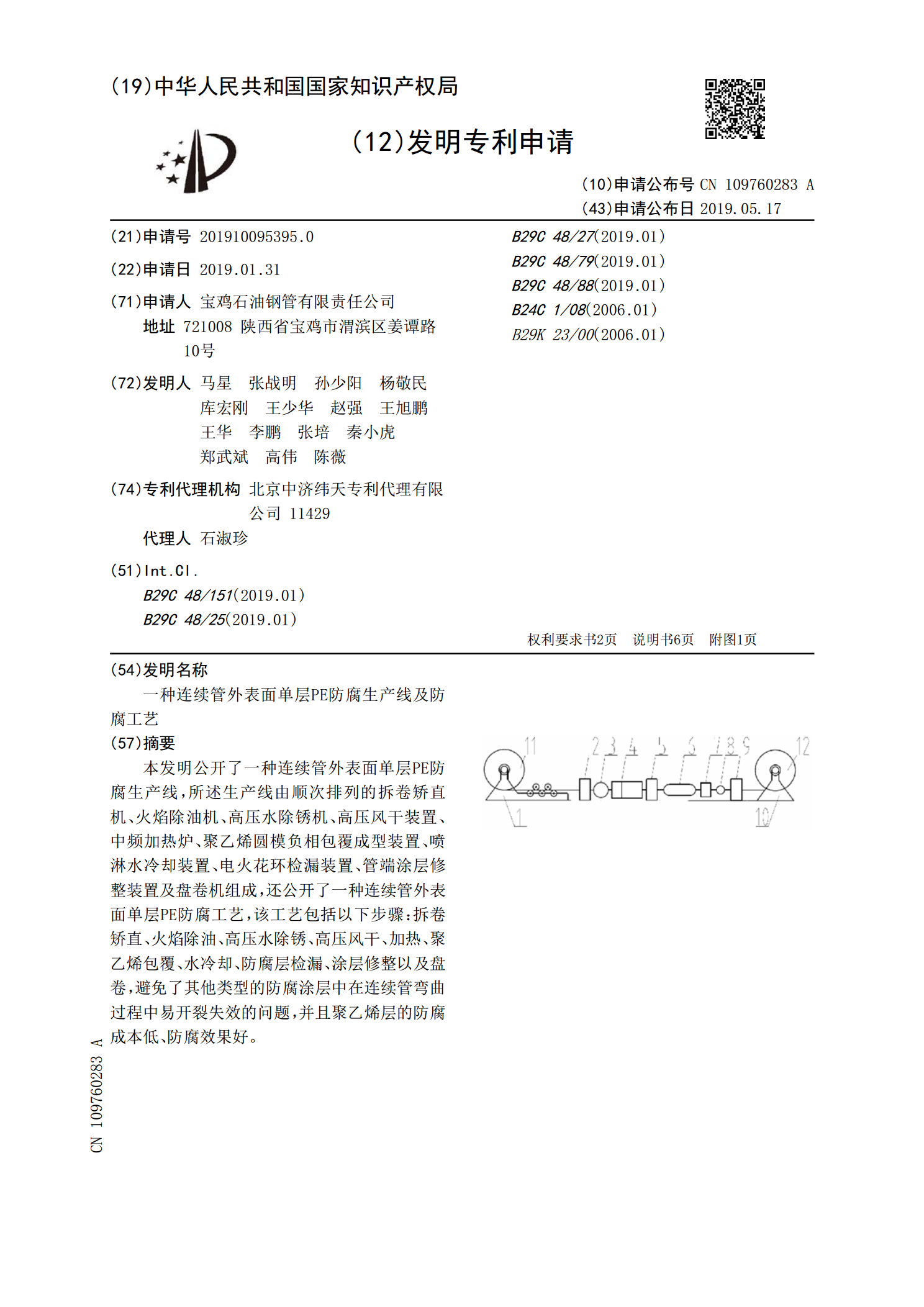
本发明公开了一种连续管外表面单层PE防腐生产线,所述生产线由顺次排列的拆卷矫直机、火焰除油机、高压水除锈机、高压风干装置、中频加热炉、聚乙烯圆模负相包覆成型装置、喷淋水冷却装置、电火花环检漏装置、管端涂层修整装置及盘卷机组成,还公开了一种连续管外表面单层PE防腐工艺,该工艺包括以下步骤:拆卷矫直、火焰除油、高压水除锈、高压风干、加热、聚乙烯包覆、水冷却、防腐层检漏、涂层修整以及盘卷,避免了其他类型的防腐涂层中在连续管弯曲过程中易开裂失效的问题,并且聚乙烯层的防腐成本低、防腐效果好。
一种钢管管外环切机器人.pdf
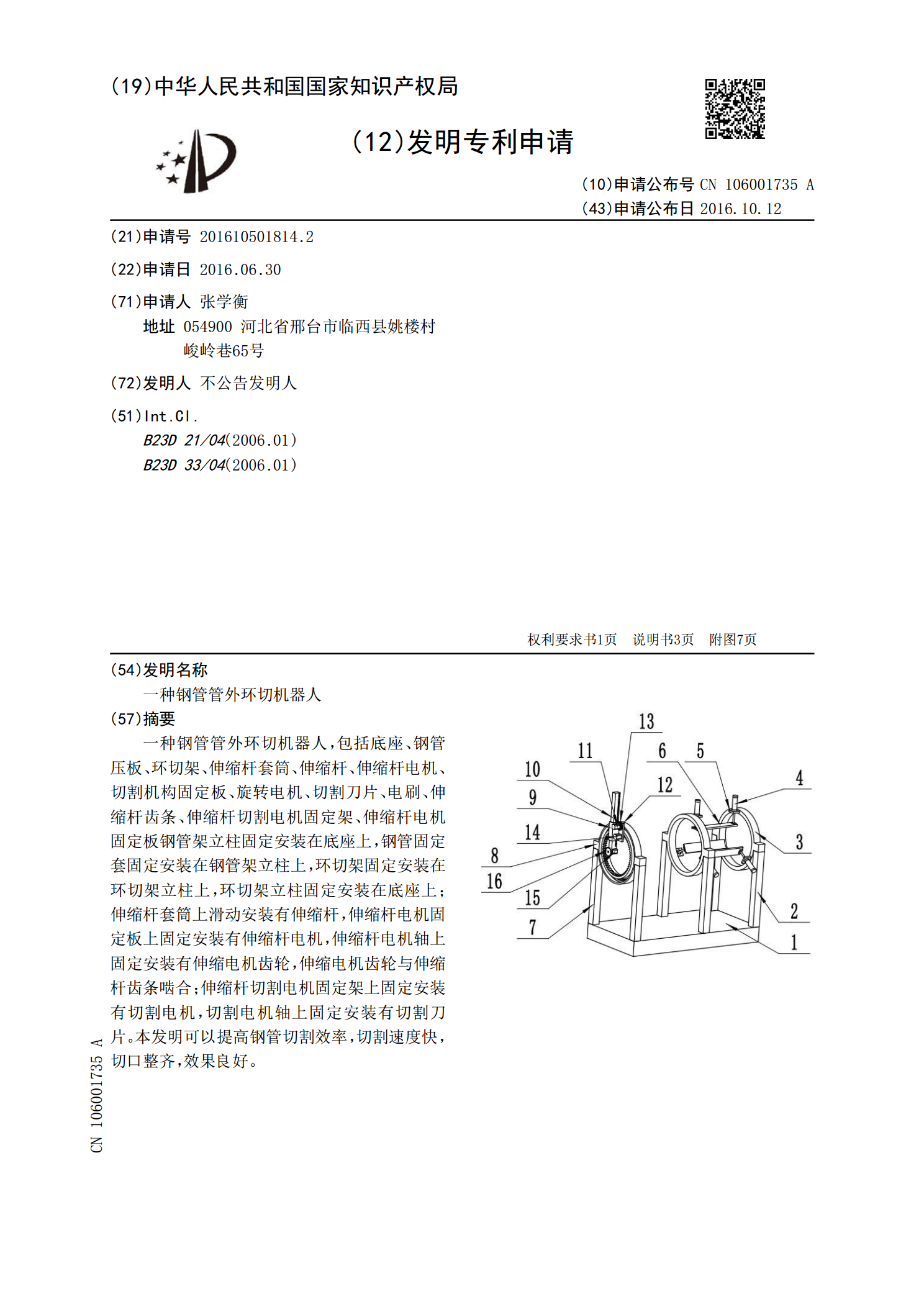
一种钢管管外环切机器人,包括底座、钢管压板、环切架、伸缩杆套筒、伸缩杆、伸缩杆电机、切割机构固定板、旋转电机、切割刀片、电刷、伸缩杆齿条、伸缩杆切割电机固定架、伸缩杆电机固定板钢管架立柱固定安装在底座上,钢管固定套固定安装在钢管架立柱上,环切架固定安装在环切架立柱上,环切架立柱固定安装在底座上;伸缩杆套筒上滑动安装有伸缩杆,伸缩杆电机固定板上固定安装有伸缩杆电机,伸缩杆电机轴上固定安装有伸缩电机齿轮,伸缩电机齿轮与伸缩杆齿条啮合;伸缩杆切割电机固定架上固定安装有切割电机,切割电机轴上固定安装有切割刀片。本