
一种新的结构光三维测量方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新的结构光三维测量方法.docx
一种新的结构光三维测量方法IntroductionTheuseofthree-dimensional(3D)measurementhasbecomemorecommoninvariousindustriessuchasmanufacturing,engineering,medicine,andentertainment.Structuredlight3Dmeasurementreferstotheprocessofusingprojectedpatternsontoatargetobjecttoextra
一种主被动结合的结构光三维测量方法.pdf
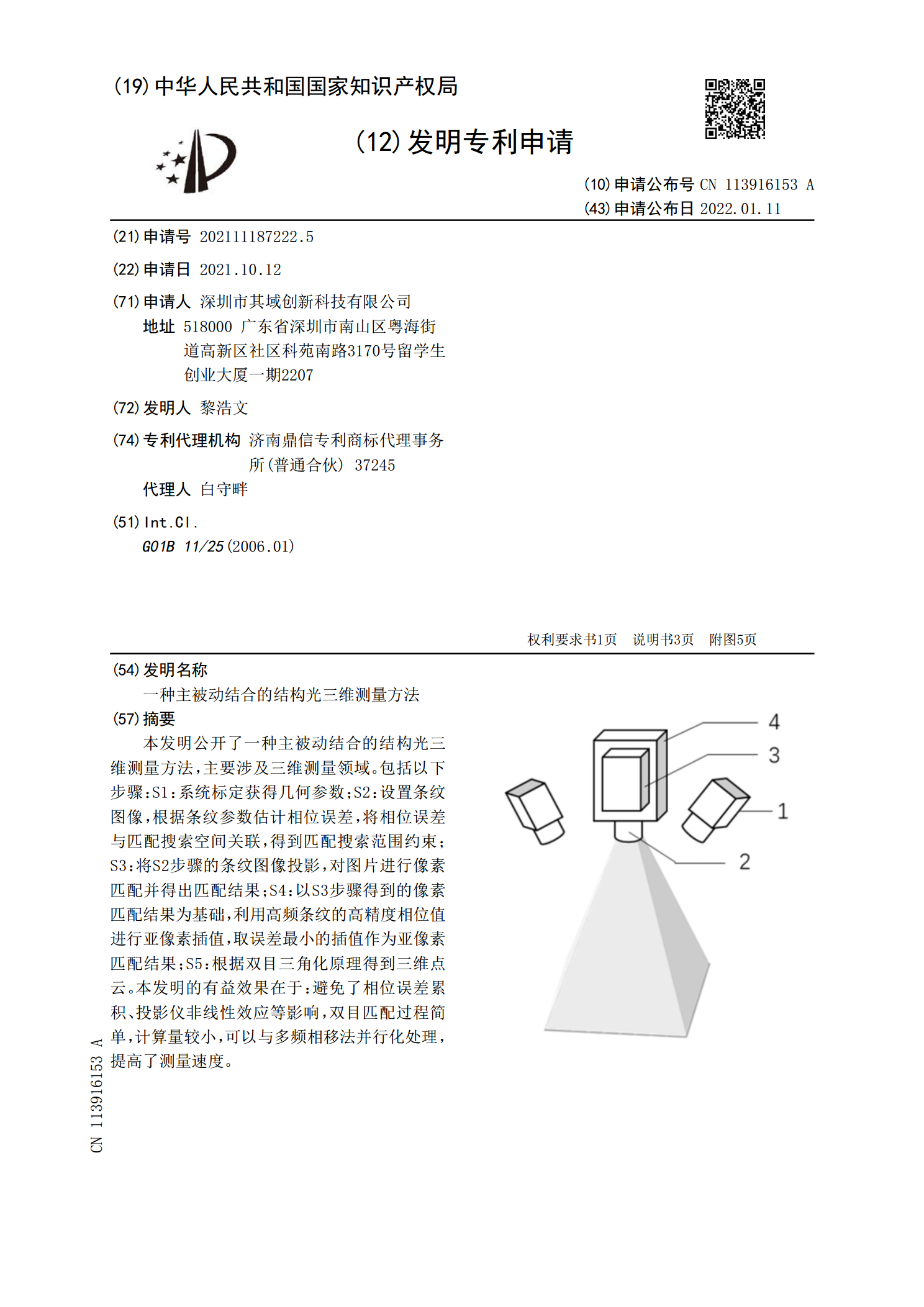
本发明公开了一种主被动结合的结构光三维测量方法,主要涉及三维测量领域。包括以下步骤:S1:系统标定获得几何参数;S2:设置条纹图像,根据条纹参数估计相位误差,将相位误差与匹配搜索空间关联,得到匹配搜索范围约束;S3:将S2步骤的条纹图像投影,对图片进行像素匹配并得出匹配结果;S4:以S3步骤得到的像素匹配结果为基础,利用高频条纹的高精度相位值进行亚像素插值,取误差最小的插值作为亚像素匹配结果;S5:根据双目三角化原理得到三维点云。本发明的有益效果在于:避免了相位误差累积、投影仪非线性效应等影响,双目匹配过

一种结构光三维测量装置及其测量方法.pdf
本发明涉及一种结构光三维测量装置,其包括:投影仪,其用于对待测物分别投射具有一定时序的格雷码条纹图案、以及具有一定时序的线移条纹图案;取像仪,其用于对该待测物取像获得若干时序变化的格雷码条纹图像以及若干时序变化的线移条纹图像;中央处理器,其用于获取至少4n幅时序连续变化的格雷码条纹图像,其中,n为正整数,并进行解码,还用于获取至少4n幅时序连续变化的线移条纹图案,并进行解码;还用于根据格雷码条纹图像的投射角αi以及线移条纹图案的投射角αt计算该待测物的表面三维轮廓数据。本发明的优点在于:能够较佳准确地确定
一种单目旋转结构光三维测量方法.pdf
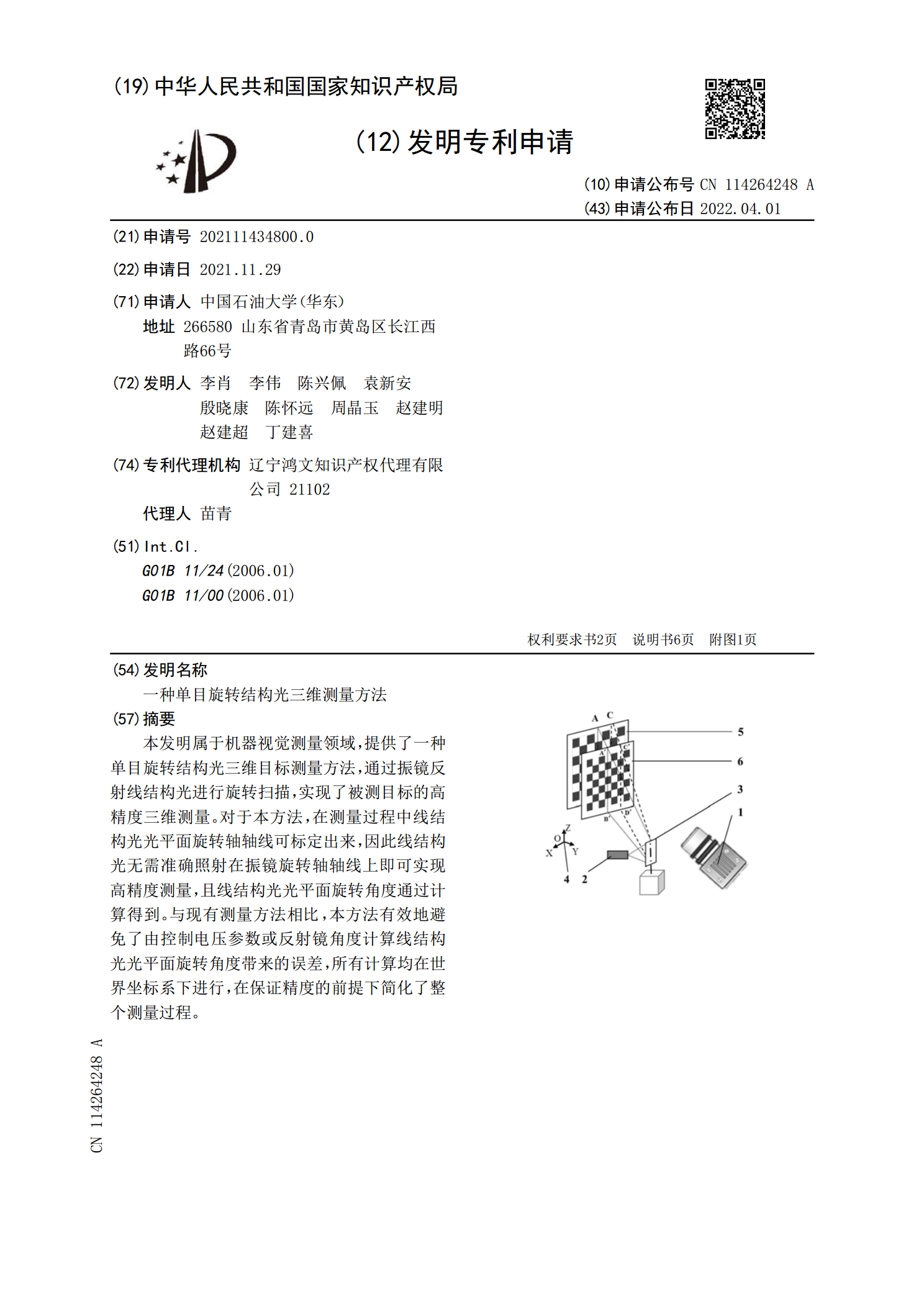
本发明属于机器视觉测量领域,提供了一种单目旋转结构光三维目标测量方法,通过振镜反射线结构光进行旋转扫描,实现了被测目标的高精度三维测量。对于本方法,在测量过程中线结构光光平面旋转轴轴线可标定出来,因此线结构光无需准确照射在振镜旋转轴轴线上即可实现高精度测量,且线结构光光平面旋转角度通过计算得到。与现有测量方法相比,本方法有效地避免了由控制电压参数或反射镜角度计算线结构光光平面旋转角度带来的误差,所有计算均在世界坐标系下进行,在保证精度的前提下简化了整个测量过程。

基于线结构光的三维影像测量方法.pdf
本发明涉及一种,尤其是一种基于线结构光的三维影像测量方法。该方法不仅能利用线结构光的原理快速获取物体表面上的三维数据,同时还能获取空间物体的精确的边缘轮廓数据;同时,该方法步骤简单,在硬件上,只需在现有的三维影像测量仪上增加环形LED光源即可实现。