
一种单目旋转结构光三维测量方法.pdf

朋兴****en

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种单目旋转结构光三维测量方法.pdf
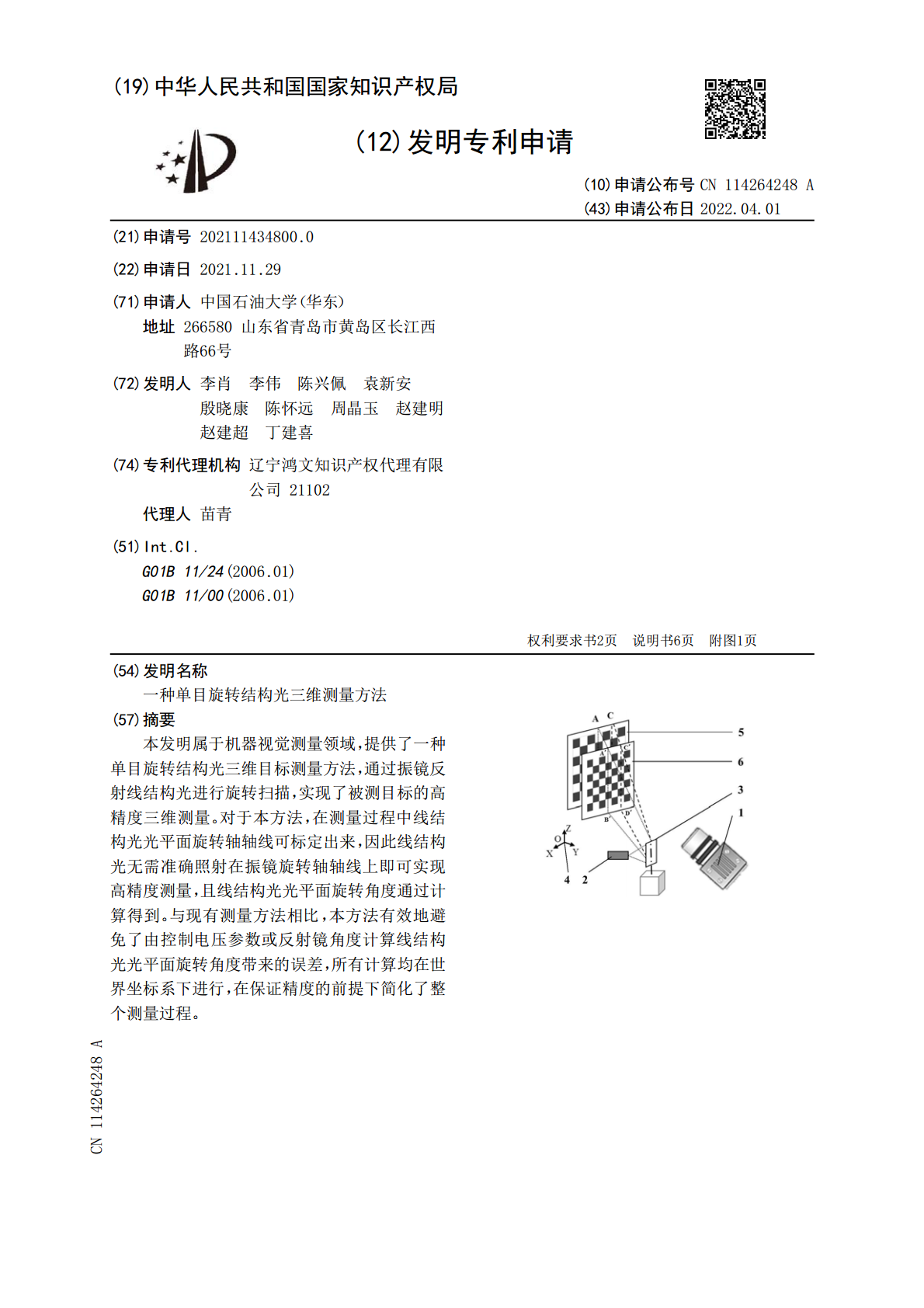
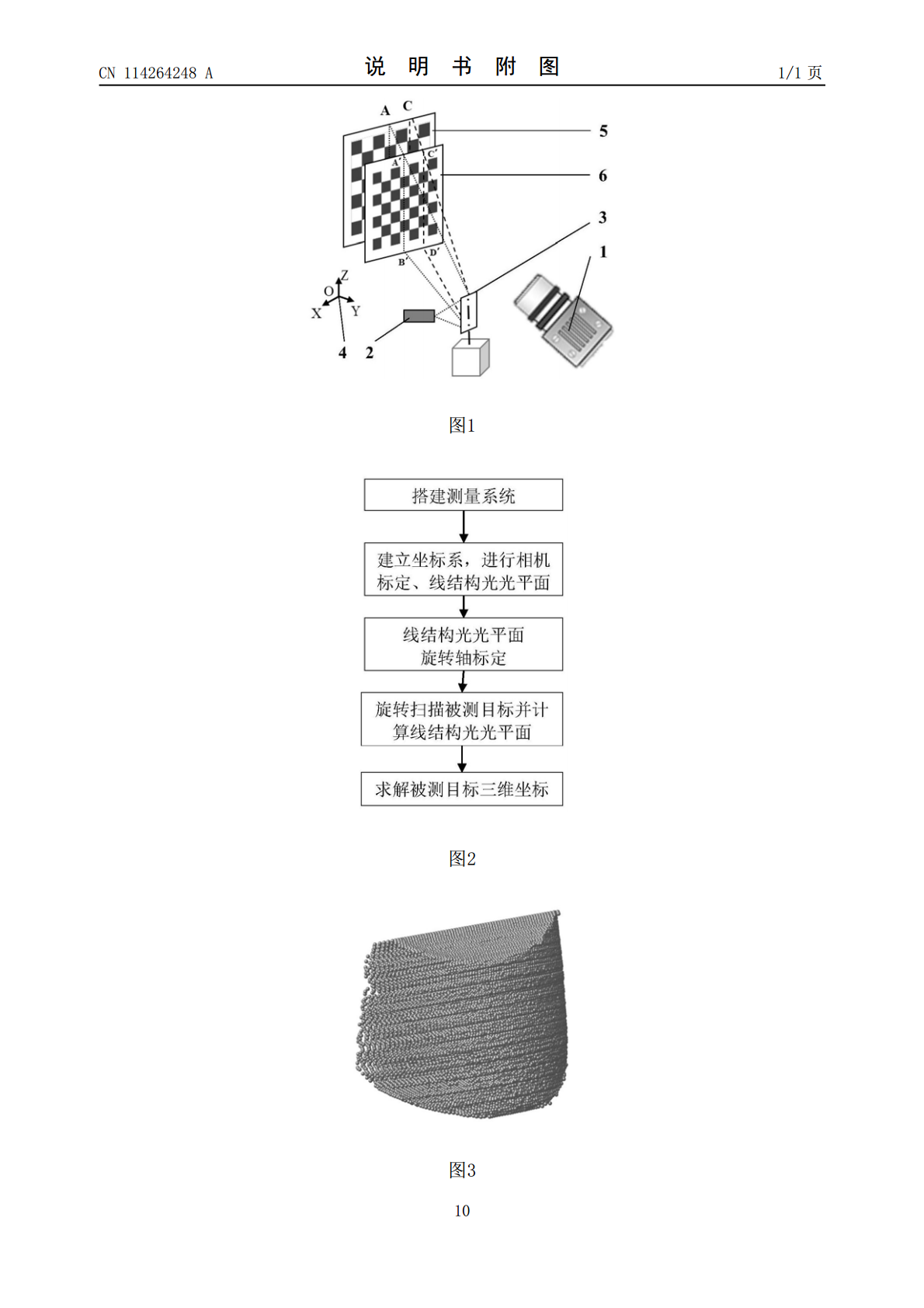
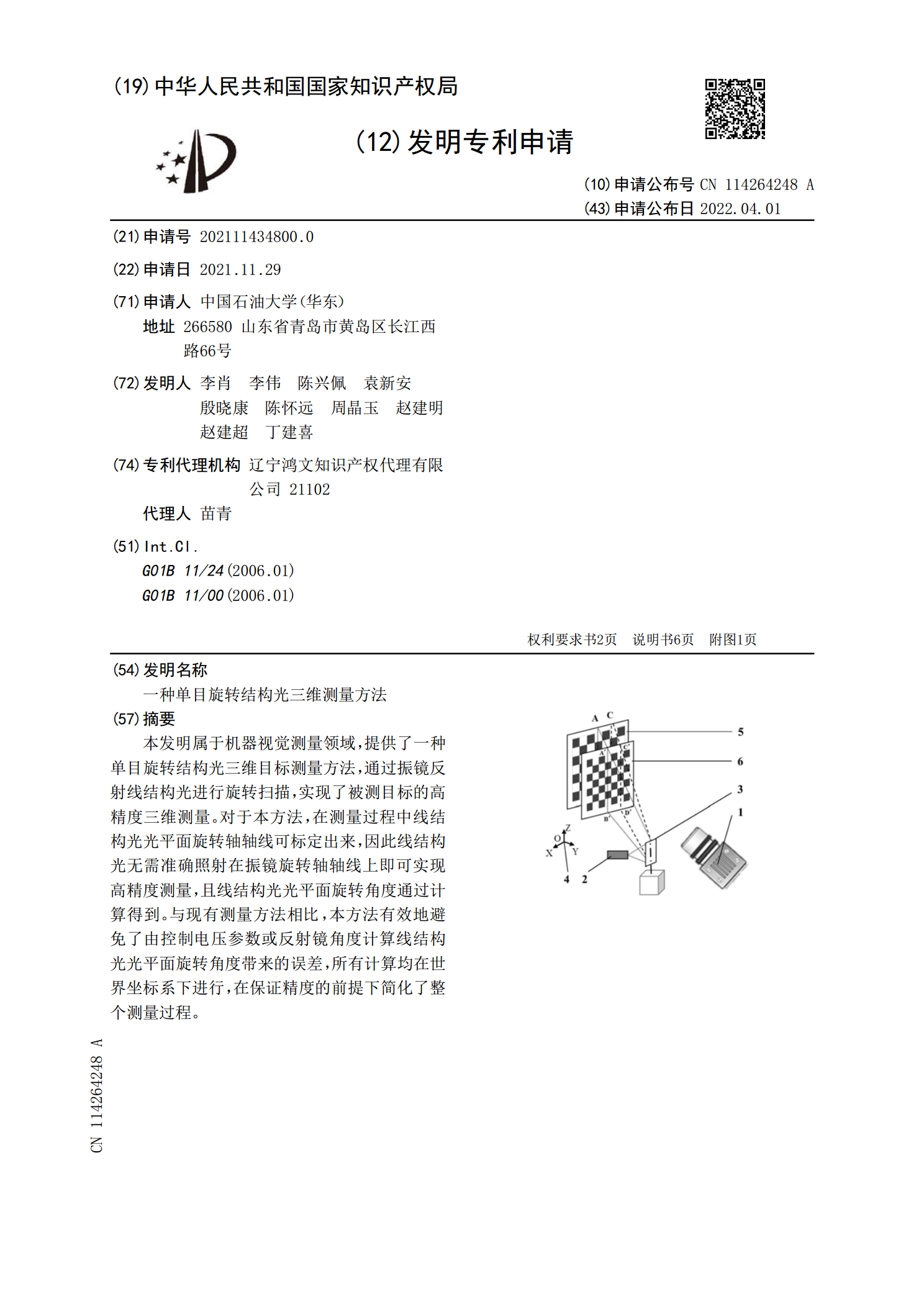
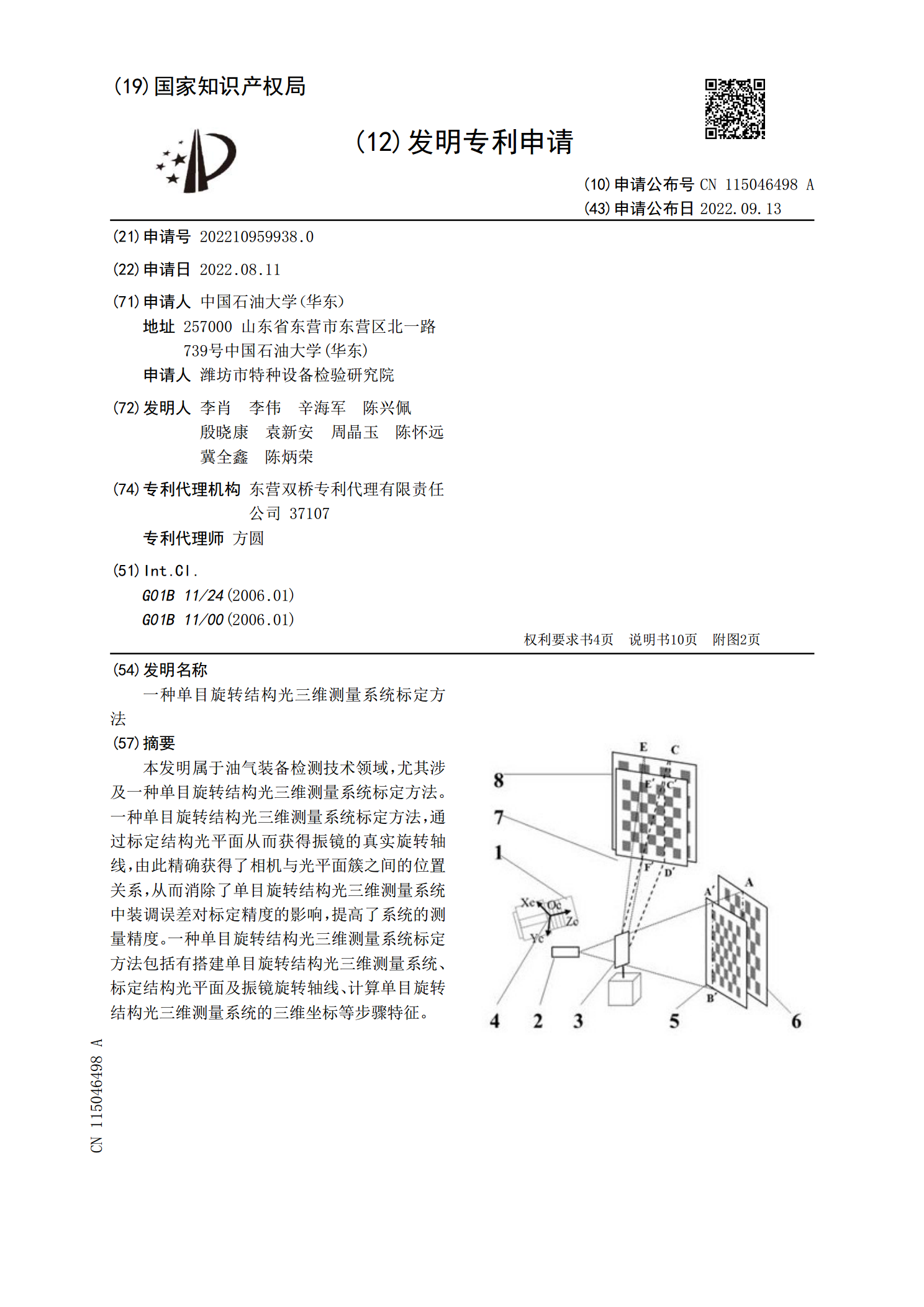
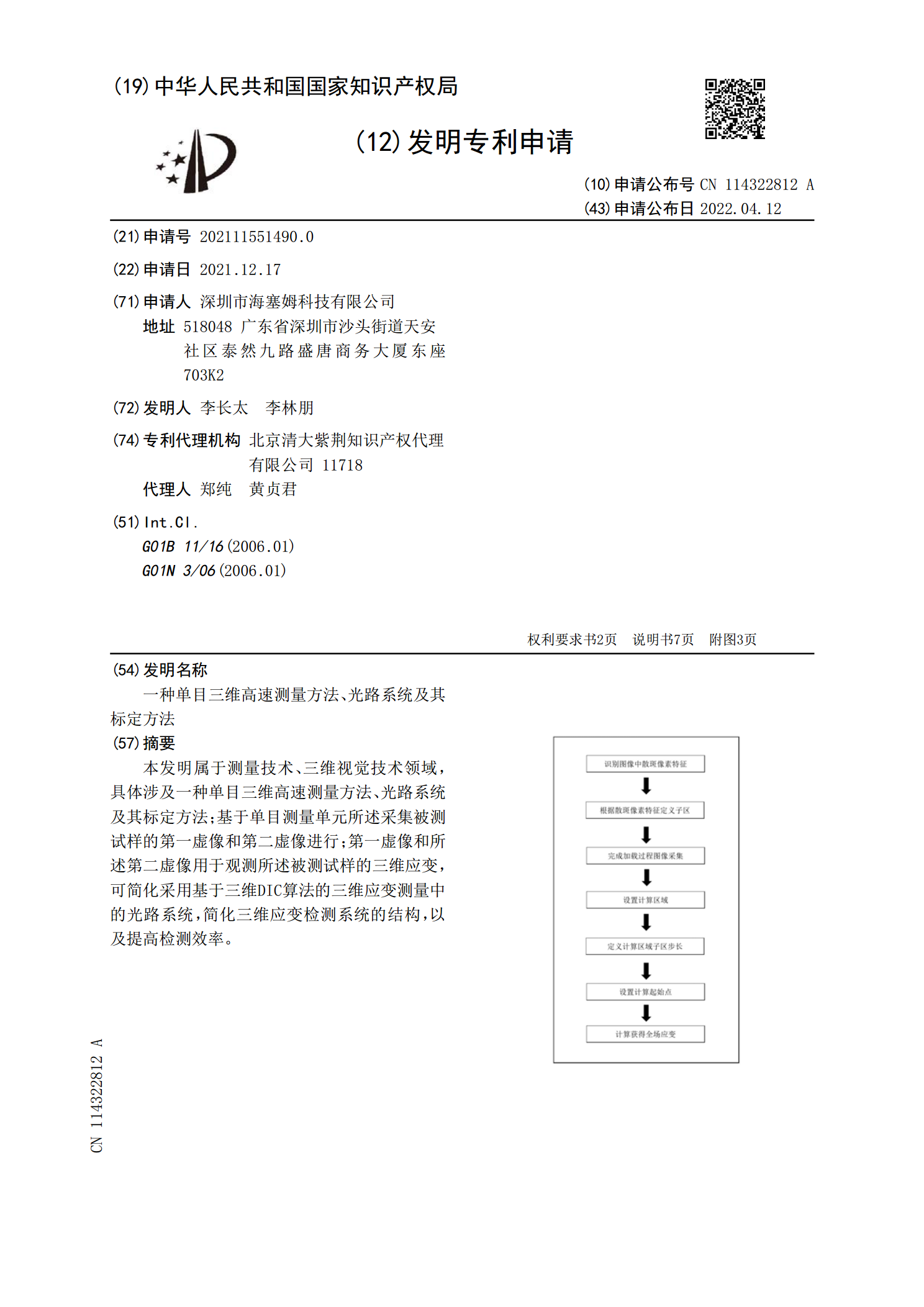
本发明属于机器视觉测量领域,提供了一种单目旋转结构光三维目标测量方法,通过振镜反射线结构光进行旋转扫描,实现了被测目标的高精度三维测量。对于本方法,在测量过程中线结构光光平面旋转轴轴线可标定出来,因此线结构光无需准确照射在振镜旋转轴轴线上即可实现高精度测量,且线结构光光平面旋转角度通过计算得到。与现有测量方法相比,本方法有效地避免了由控制电压参数或反射镜角度计算线结构光光平面旋转角度带来的误差,所有计算均在世界坐标系下进行,在保证精度的前提下简化了整个测量过程。
一种单目旋转结构光三维测量系统标定方法.pdf
本发明属于油气装备检测技术领域,尤其涉及一种单目旋转结构光三维测量系统标定方法。一种单目旋转结构光三维测量系统标定方法,通过标定结构光平面从而获得振镜的真实旋转轴线,由此精确获得了相机与光平面簇之间的位置关系,从而消除了单目旋转结构光三维测量系统中装调误差对标定精度的影响,提高了系统的测量精度。一种单目旋转结构光三维测量系统标定方法包括有搭建单目旋转结构光三维测量系统、标定结构光平面及振镜旋转轴线、计算单目旋转结构光三维测量系统的三维坐标等步骤特征。
一种单目三维高速测量方法、光路系统及其标定方法.pdf
本发明属于测量技术、三维视觉技术领域,具体涉及一种单目三维高速测量方法、光路系统及其标定方法;基于单目测量单元所述采集被测试样的第一虚像和第二虚像进行;第一虚像和所述第二虚像用于观测所述被测试样的三维应变,可简化采用基于三维DIC算法的三维应变测量中的光路系统,简化三维应变检测系统的结构,以及提高检测效率。

基于单目线结构光的高精度车辙测量方法的研究.docx
基于单目线结构光的高精度车辙测量方法的研究基于单目线结构光的高精度车辙测量方法的研究摘要:随着交通运输的不断发展,车辙对道路的影响越来越严重。因此,对车辙进行准确测量和评估显得尤为重要。本论文提出了一种基于单目线结构光的高精度车辙测量方法。该方法通过对车辙周围路面进行结构光的投射,利用单目相机获取结构光的形变信息,并通过几何分析和图像处理算法,实现对车辙的精确测量。实验结果表明,该方法具有较高的测量精度和快速的处理速度,能够有效应用于车辙的测量和评估。关键词:车辙测量;单目线结构光;几何分析;图像处理;测

一种新的结构光三维测量方法.docx
一种新的结构光三维测量方法IntroductionTheuseofthree-dimensional(3D)measurementhasbecomemorecommoninvariousindustriessuchasmanufacturing,engineering,medicine,andentertainment.Structuredlight3Dmeasurementreferstotheprocessofusingprojectedpatternsontoatargetobjecttoextra