
一种主被动结合的结构光三维测量方法.pdf

小沛****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种主被动结合的结构光三维测量方法.pdf
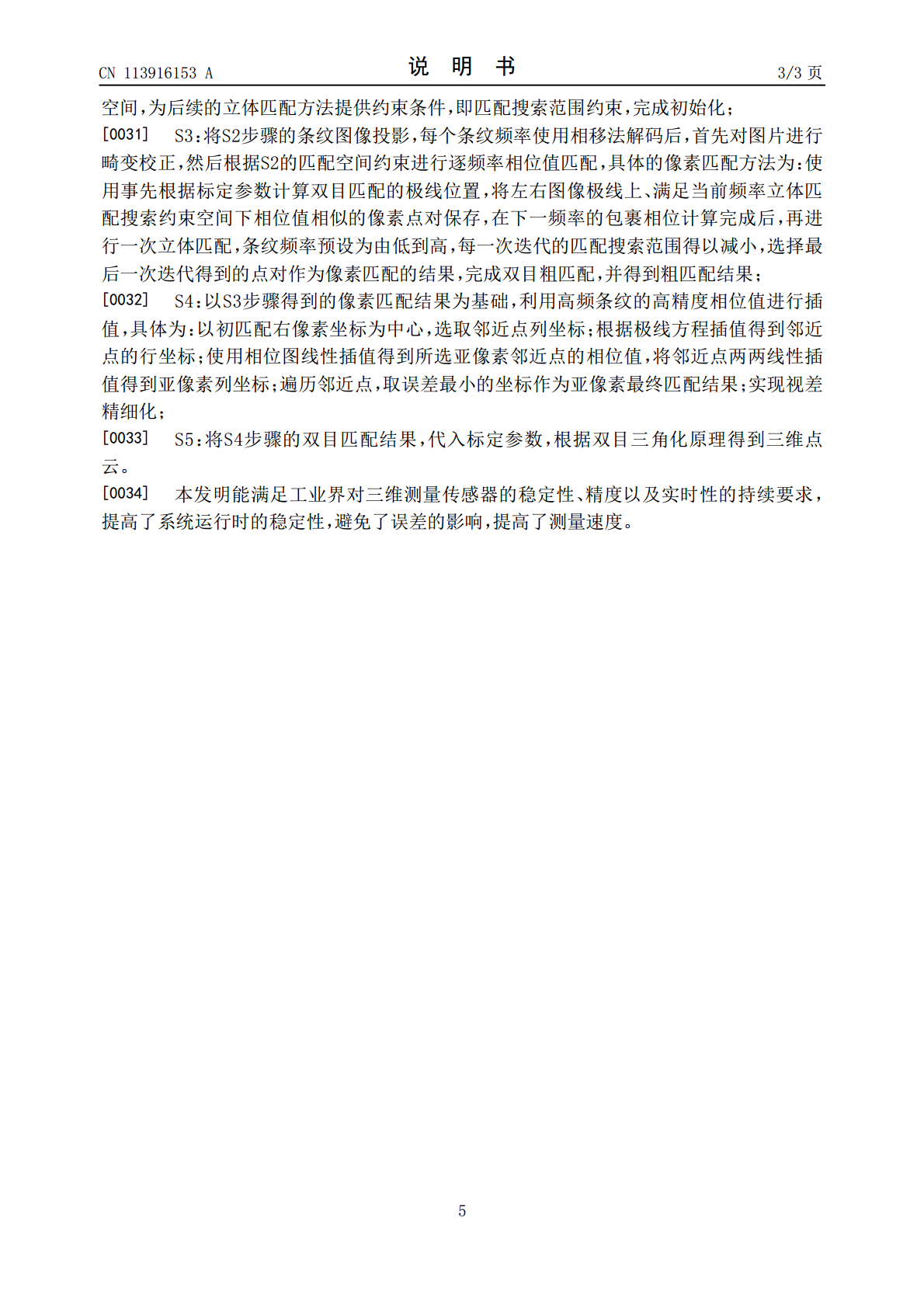
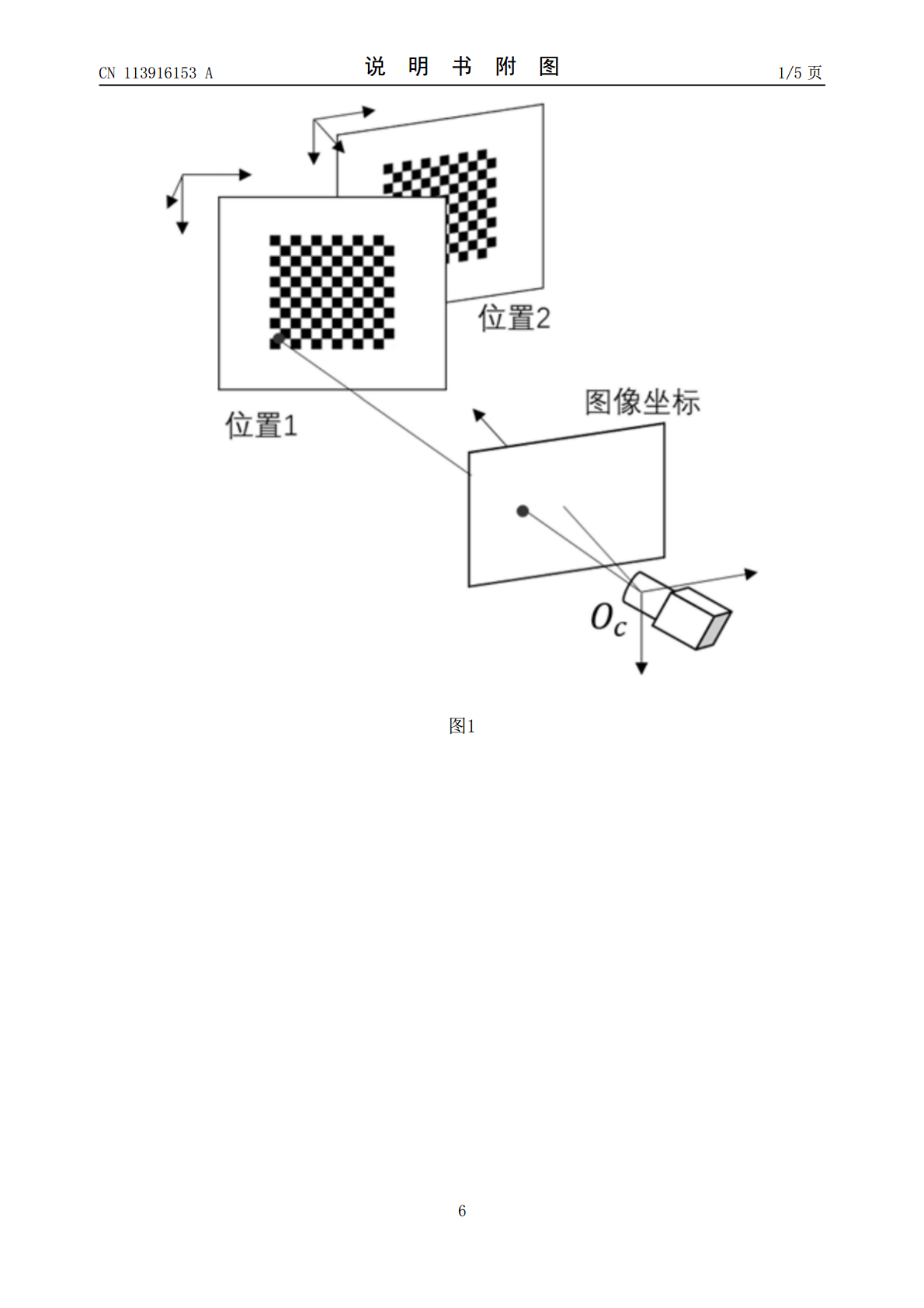
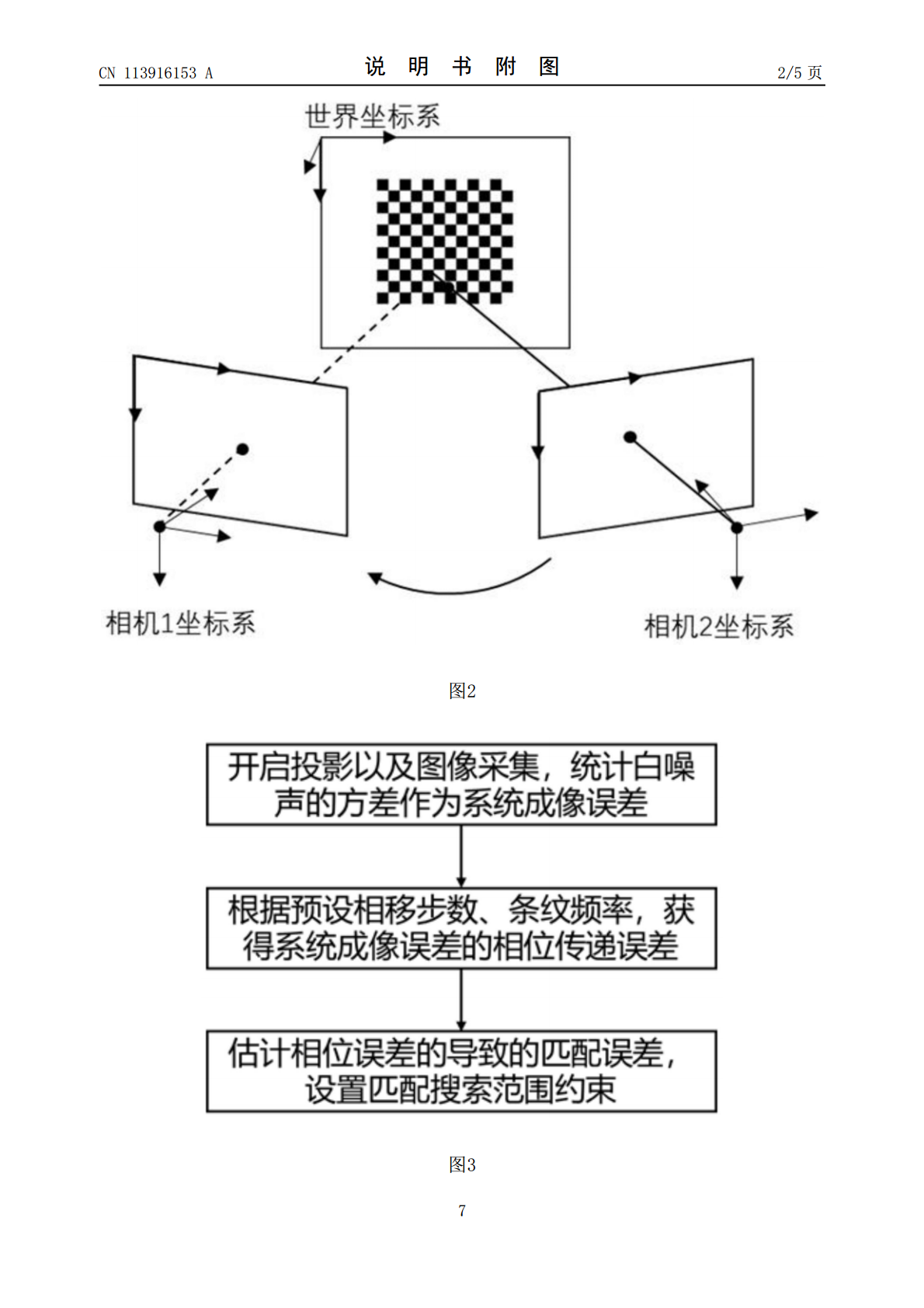
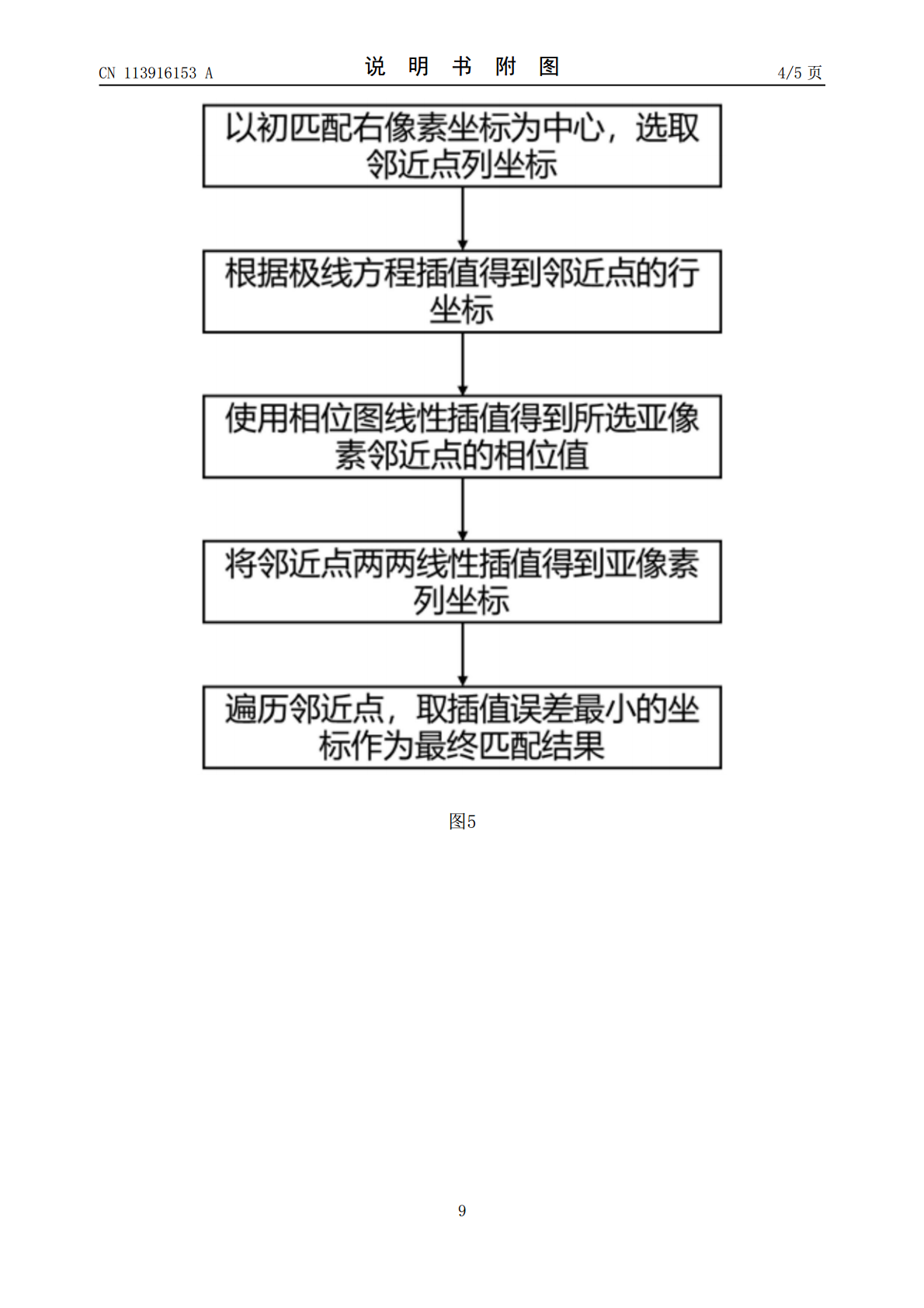
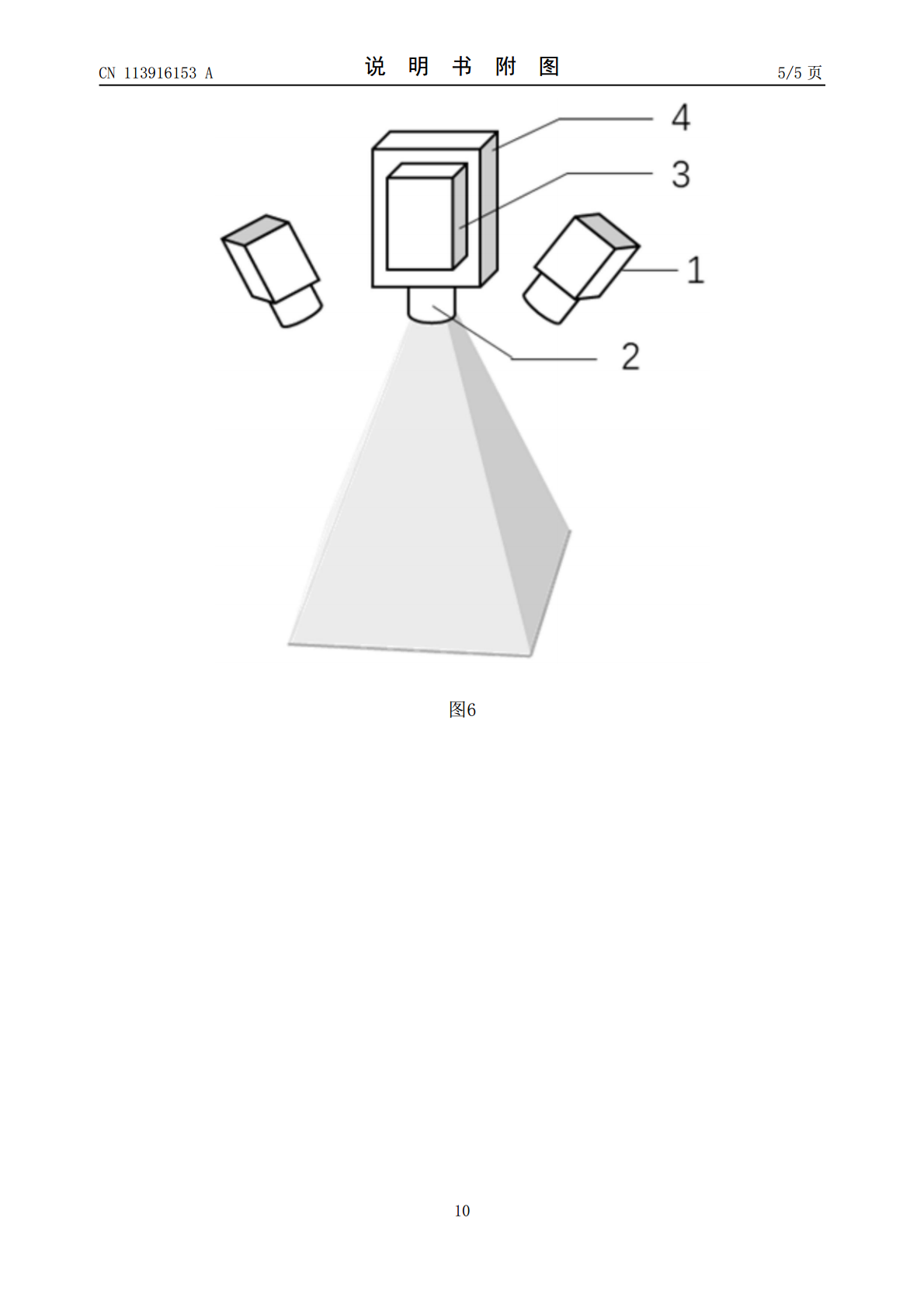
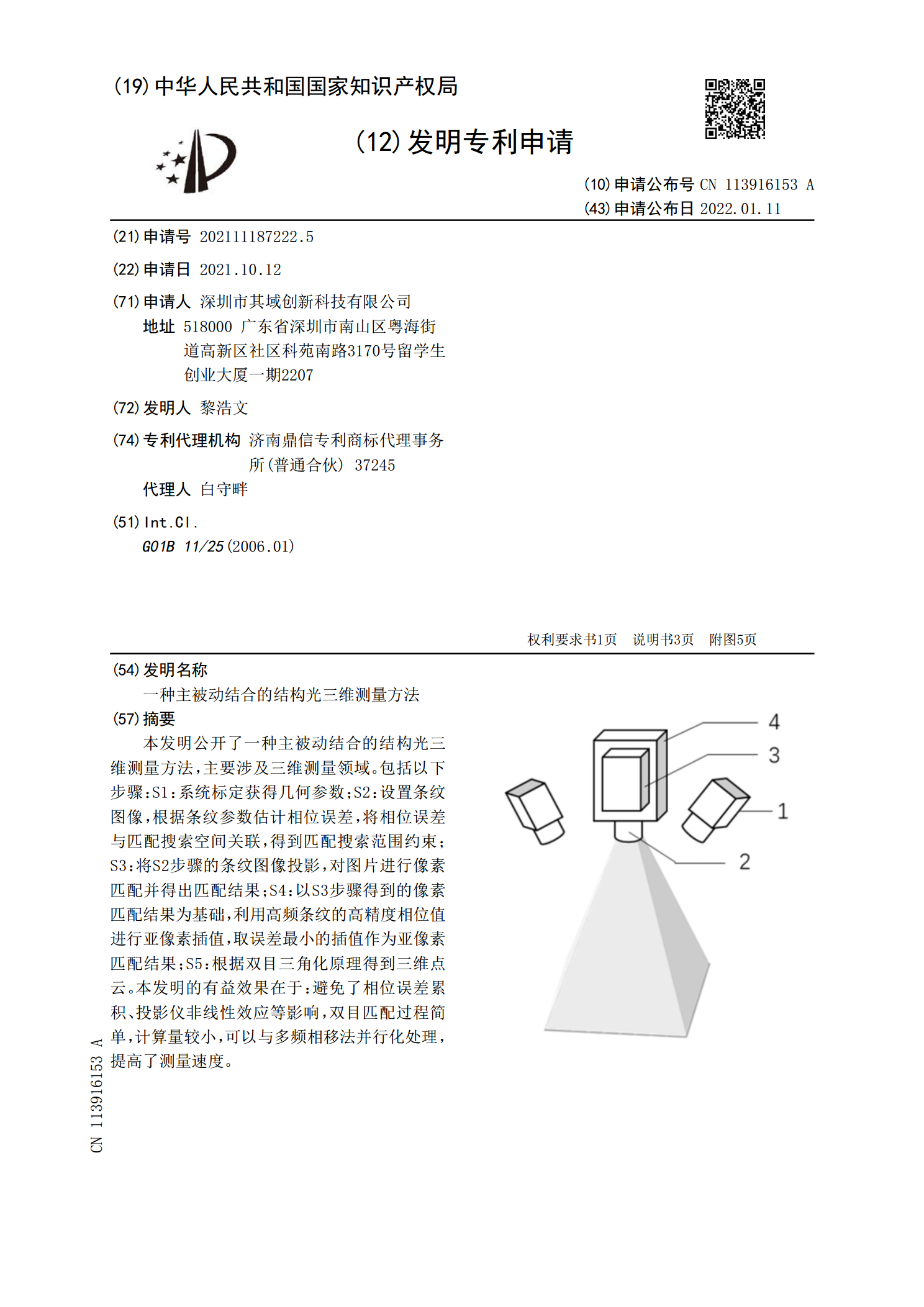
本发明公开了一种主被动结合的结构光三维测量方法,主要涉及三维测量领域。包括以下步骤:S1:系统标定获得几何参数;S2:设置条纹图像,根据条纹参数估计相位误差,将相位误差与匹配搜索空间关联,得到匹配搜索范围约束;S3:将S2步骤的条纹图像投影,对图片进行像素匹配并得出匹配结果;S4:以S3步骤得到的像素匹配结果为基础,利用高频条纹的高精度相位值进行亚像素插值,取误差最小的插值作为亚像素匹配结果;S5:根据双目三角化原理得到三维点云。本发明的有益效果在于:避免了相位误差累积、投影仪非线性效应等影响,双目匹配过
基于SDN的主被动结合自适应流量测量方法及装置.pdf
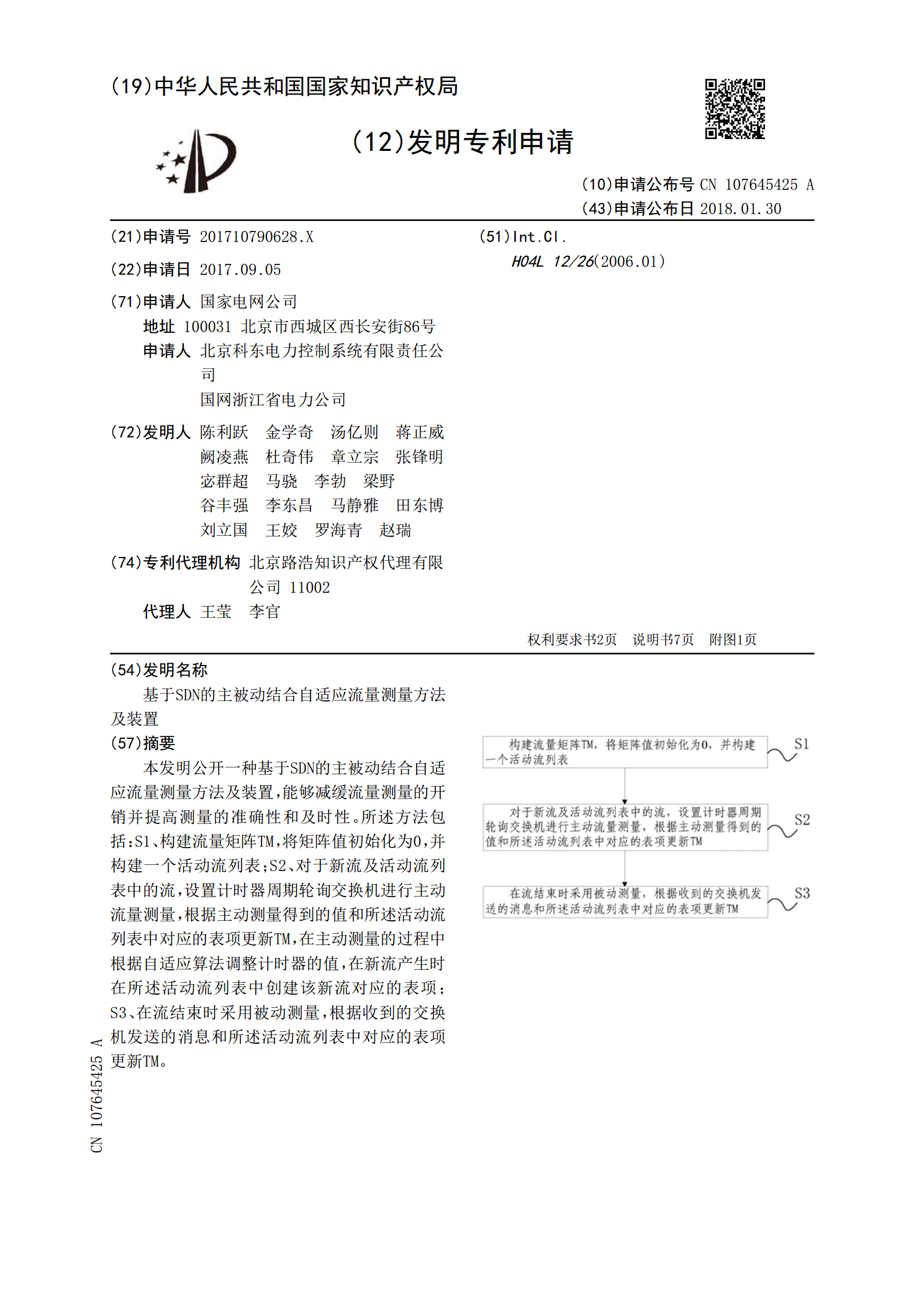
本发明公开一种基于SDN的主被动结合自适应流量测量方法及装置,能够减缓流量测量的开销并提高测量的准确性和及时性。所述方法包括:S1、构建流量矩阵TM,将矩阵值初始化为0,并构建一个活动流列表;S2、对于新流及活动流列表中的流,设置计时器周期轮询交换机进行主动流量测量,根据主动测量得到的值和所述活动流列表中对应的表项更新TM,在主动测量的过程中根据自适应算法调整计时器的值,在新流产生时在所述活动流列表中创建该新流对应的表项;S3、在流结束时采用被动测量,根据收到的交换机发送的消息和所述活动流列表中对应的表项

一种新的结构光三维测量方法.docx
一种新的结构光三维测量方法IntroductionTheuseofthree-dimensional(3D)measurementhasbecomemorecommoninvariousindustriessuchasmanufacturing,engineering,medicine,andentertainment.Structuredlight3Dmeasurementreferstotheprocessofusingprojectedpatternsontoatargetobjecttoextra

一种结构光三维测量装置及其测量方法.pdf
本发明涉及一种结构光三维测量装置,其包括:投影仪,其用于对待测物分别投射具有一定时序的格雷码条纹图案、以及具有一定时序的线移条纹图案;取像仪,其用于对该待测物取像获得若干时序变化的格雷码条纹图像以及若干时序变化的线移条纹图像;中央处理器,其用于获取至少4n幅时序连续变化的格雷码条纹图像,其中,n为正整数,并进行解码,还用于获取至少4n幅时序连续变化的线移条纹图案,并进行解码;还用于根据格雷码条纹图像的投射角αi以及线移条纹图案的投射角αt计算该待测物的表面三维轮廓数据。本发明的优点在于:能够较佳准确地确定
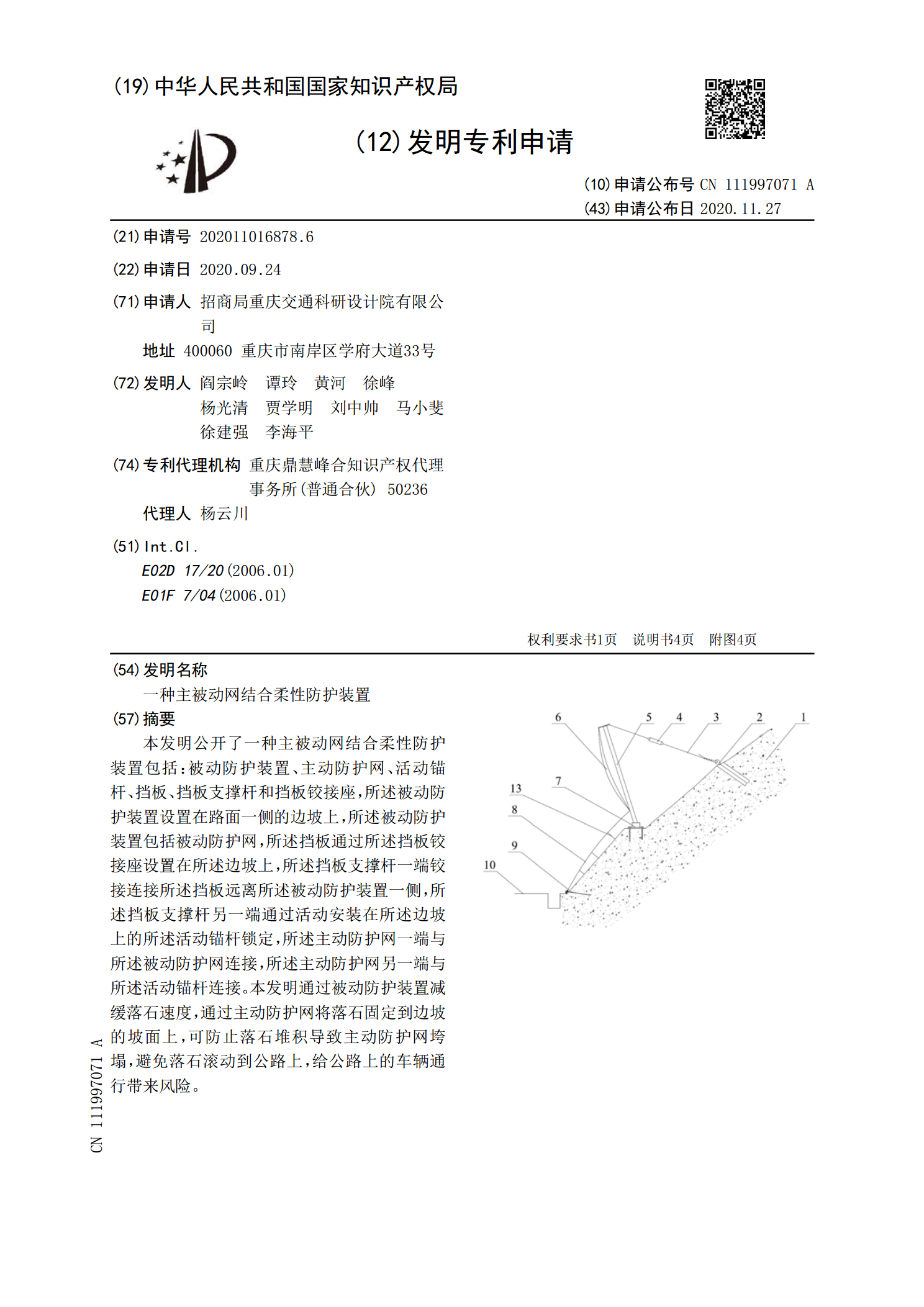
一种主被动网结合柔性防护装置.pdf
本发明公开了一种主被动网结合柔性防护装置包括:被动防护装置、主动防护网、活动锚杆、挡板、挡板支撑杆和挡板铰接座,所述被动防护装置设置在路面一侧的边坡上,所述被动防护装置包括被动防护网,所述挡板通过所述挡板铰接座设置在所述边坡上,所述挡板支撑杆一端铰接连接所述挡板远离所述被动防护装置一侧,所述挡板支撑杆另一端通过活动安装在所述边坡上的所述活动锚杆锁定,所述主动防护网一端与所述被动防护网连接,所述主动防护网另一端与所述活动锚杆连接。本发明通过被动防护装置减缓落石速度,通过主动防护网将落石固定到边坡的坡面上,可