
一种电动车辆底盘系统及其协同控制方法.pdf

是你****平呀


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电动车辆底盘系统及其协同控制方法.pdf
一种电动车辆底盘系统的协同控制方法,涉及车辆控制领域。其通过将传感器量测得到的制动触发信号、轮速信号、车身的垂向加速度信号、纵向加速度信号、侧向加速度信号、俯仰角信号、侧倾角信号、横摆角速度信号、转向轴输入转矩信号和车速信号传递至协同控制器,协同控制器监控车辆的运动状态并适时向电液联合制动上层控制器和EPS+ASS集中控制器施加控制命令,电液联合制动上层控制器和EPS+ASS集中控制器根据各自接收的传感器信号和协同控制器命令进行操作,电液联合制动上层控制器通过协调电机控制器和ABS控制器控制轮毂电机和液压

电动车辆底盘系统协同控制建模与仿真研究的开题报告.docx
电动车辆底盘系统协同控制建模与仿真研究的开题报告一、选题背景随着环保意识的不断提高和新能源技术的快速发展,电动车辆已成为未来汽车发展的重要方向。电动车辆与传统燃油车辆相比,底盘系统具有许多不同之处,其动力、转向、制动等系统之间的协同控制是保证车辆性能优越的关键。因此,电动车辆底盘系统协同控制建模与仿真研究具有重要意义。二、选题意义本研究将通过建立电动车辆底盘系统的协同控制模型,探究电动车辆底盘系统之间的相互作用关系,并通过仿真验证模型的可行性和有效性,最终提高电动车辆的性能和安全性。同时,本研究也是对目前

一种电动车辆充电系统及其控制方法.pdf
本发明公开了一种电动车辆充电系统及其控制方法,以解决现有技术充电线杂乱无章、影响美观、容易损坏等问题;本发明的充电系统包括充电装置、用户终端和管理中心,充电装置包括标识、充电线、执行单元和智控单元,执行单元包括电动机构、第一导轮和第二导轮,第一导轮和第二导轮之间安置充电线,执行单元工作时,电动机构驱动第一导轮和/或第二导轮运转,实现对充电线的输送;需要充电时,利用用户终端读取标识,通过网络、管理中心、经由智控单元指令充电装置送出充电线,即能够为电动车辆充电,非常方便;并且充电结束后,充电装置收回充电线,避
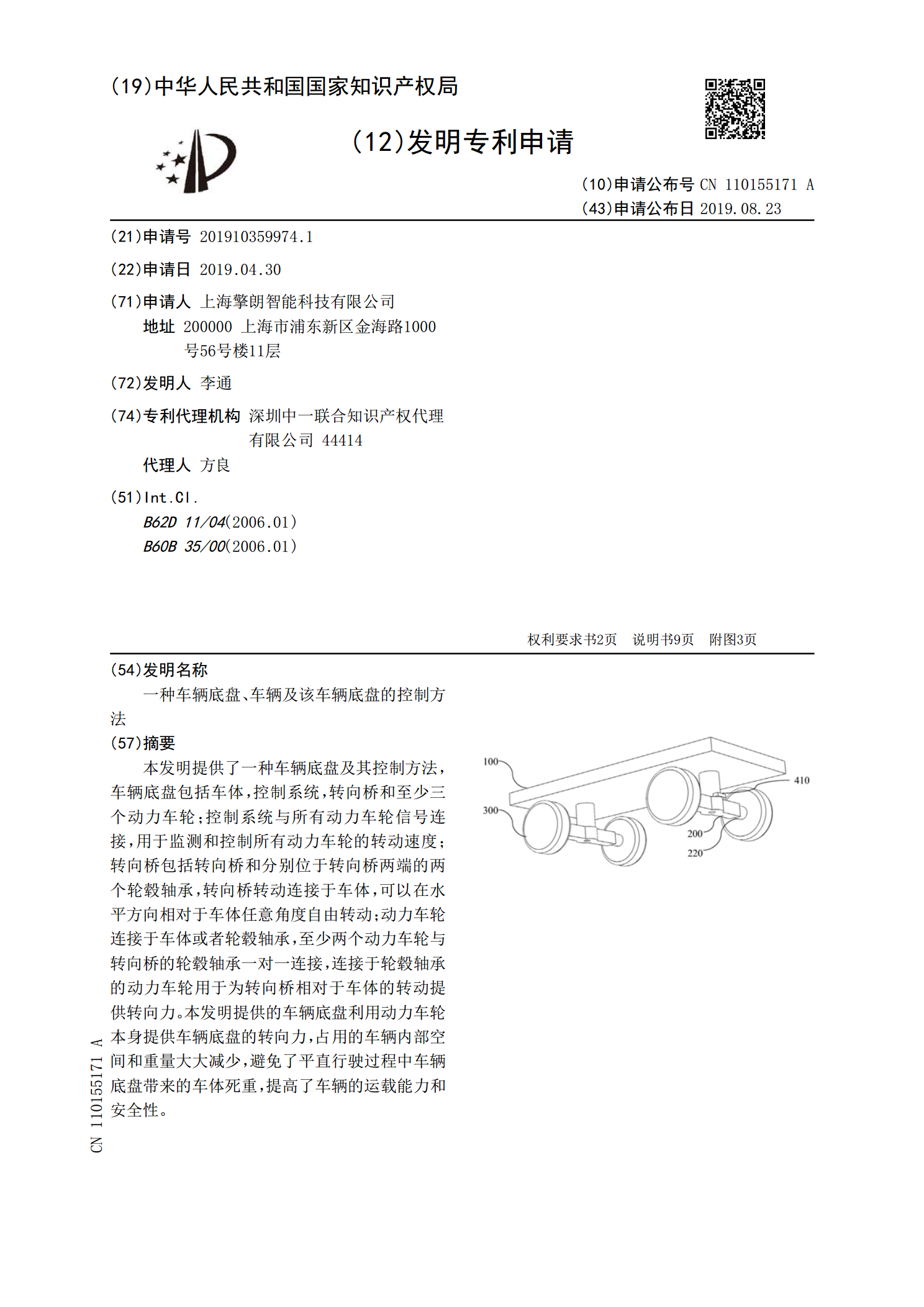
一种车辆底盘、车辆及该车辆底盘的控制方法.pdf
本发明提供了一种车辆底盘及其控制方法,车辆底盘包括车体,控制系统,转向桥和至少三个动力车轮;控制系统与所有动力车轮信号连接,用于监测和控制所有动力车轮的转动速度;转向桥包括转向桥和分别位于转向桥两端的两个轮毂轴承,转向桥转动连接于车体,可以在水平方向相对于车体任意角度自由转动;动力车轮连接于车体或者轮毂轴承,至少两个动力车轮与转向桥的轮毂轴承一对一连接,连接于轮毂轴承的动力车轮用于为转向桥相对于车体的转动提供转向力。本发明提供的车辆底盘利用动力车轮本身提供车辆底盘的转向力,占用的车辆内部空间和重量大大减少
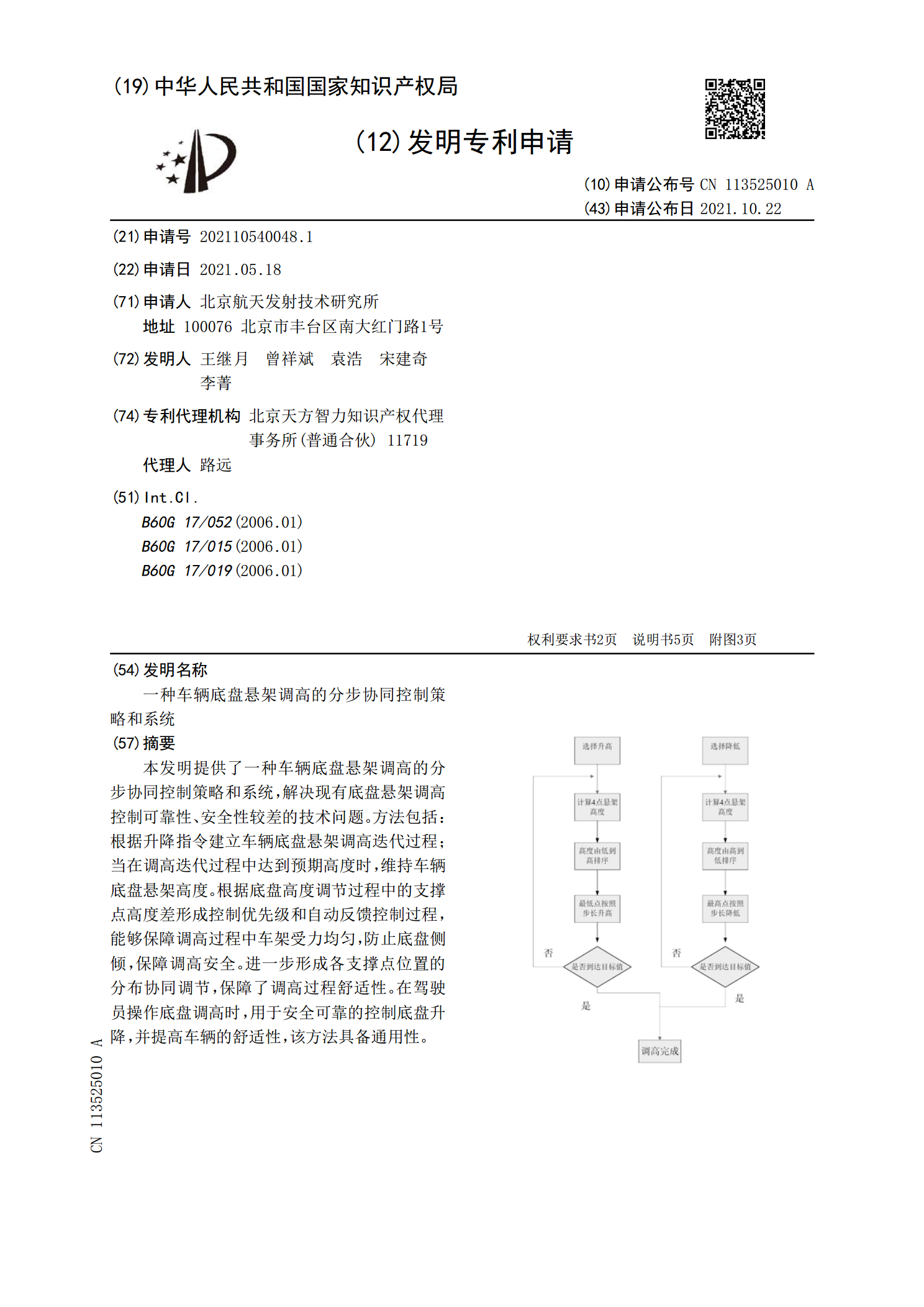
一种车辆底盘悬架调高的分步协同控制策略和系统.pdf
本发明提供了一种车辆底盘悬架调高的分步协同控制策略和系统,解决现有底盘悬架调高控制可靠性、安全性较差的技术问题。方法包括:根据升降指令建立车辆底盘悬架调高迭代过程;当在调高迭代过程中达到预期高度时,维持车辆底盘悬架高度。根据底盘高度调节过程中的支撑点高度差形成控制优先级和自动反馈控制过程,能够保障调高过程中车架受力均匀,防止底盘侧倾,保障调高安全。进一步形成各支撑点位置的分布协同调节,保障了调高过程舒适性。在驾驶员操作底盘调高时,用于安全可靠的控制底盘升降,并提高车辆的舒适性,该方法具备通用性。