
轮式机器人车轮限位器.pdf

丹烟****魔王


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮式机器人车轮限位器.pdf
本发明公开了一种轮式机器人车轮限位器,由左前限位架、左后限位架、右前限位架、右后限位架、双头螺柱、导柱、右旋螺柱、调节套、左旋螺柱组成。其中,所述的左前限位架和左后限位架的上端通过双头螺柱相连接,其下端通过导柱相连接;右前限位架和右后限位架的上端通过双头螺柱相连接,其下端通过导柱相连接。双头螺柱的一端设有左旋螺纹,其另一端设有右旋螺纹。所述的左旋螺柱的一端与左前限位架、左后限位架固连,其另一端与调节套通过左旋螺纹相连接;所述的右旋螺柱的一端与右前限位架、右后限位架固连,其另一端与调节套通过右旋螺纹相连接。
车轮限位器组件.pdf
本发明公开了一种车轮限位器组件,其能够在外力施加到车辆时阻止车轮朝向车辆的乘客舱移动。所述车轮限位器组件大体包括能量吸收托架和联接到所述能量吸收托架的板件。所述能量吸收托架包括多个凸脊和沟槽,以限定波形部分。所述板件在凸脊处联接到所述能量吸收托架,使得施加到所述车轮限位器组件的外力可从所述板件传递到所述能量吸收托架。

齿轮式磁力缓冲限位器.pdf
本发明涉及一种齿轮式磁力缓冲限位器,主要包括固定磁铁、摆动杆、摆动磁铁、输入齿轮、大小齿轮副、末级小齿轮、齿轮轴、轴承和箱体,其特征是输入齿轮、一级或一级以上的大小齿轮副、末级小齿轮和设有摆动磁铁的摆动杆分别通过齿轮轴依次定位于箱体,末级小齿轮和摆动杆固定于同一齿轮轴;固定磁铁固定在箱体中,其位置在摆动磁铁摆动的路线上;当摆动杆向两侧摆动时,摆动磁铁与固定磁铁靠近,受斥力或吸力的作用制动;根据杠杆原理,力从输入齿轮经过一级或一级以上的大小齿轮副传递到末级小齿轮和摆动杆的过程是一个增距减力的过程,实现利用较

槽轮式丝杆限位器.pdf
一种槽轮式丝杆限位器,丝杆安装在底座上,丝杆伸出一端与从动齿轮连接;槽轮与丝杆为螺纹副配合;扭簧固定在底座两端内侧,扭簧的环扣卡入槽轮齿槽中;与槽轮配合的行程开关分列丝杆两侧。本发明提供一种槽轮式丝杆限位器,由于通过槽轮沿丝杆轴向移动,触发微动开关,从而实现限位功能,具有结构紧凑、体积小、质量小、调试方便、限位准确可靠的优点。
一种橡塑车轮限位器.pdf
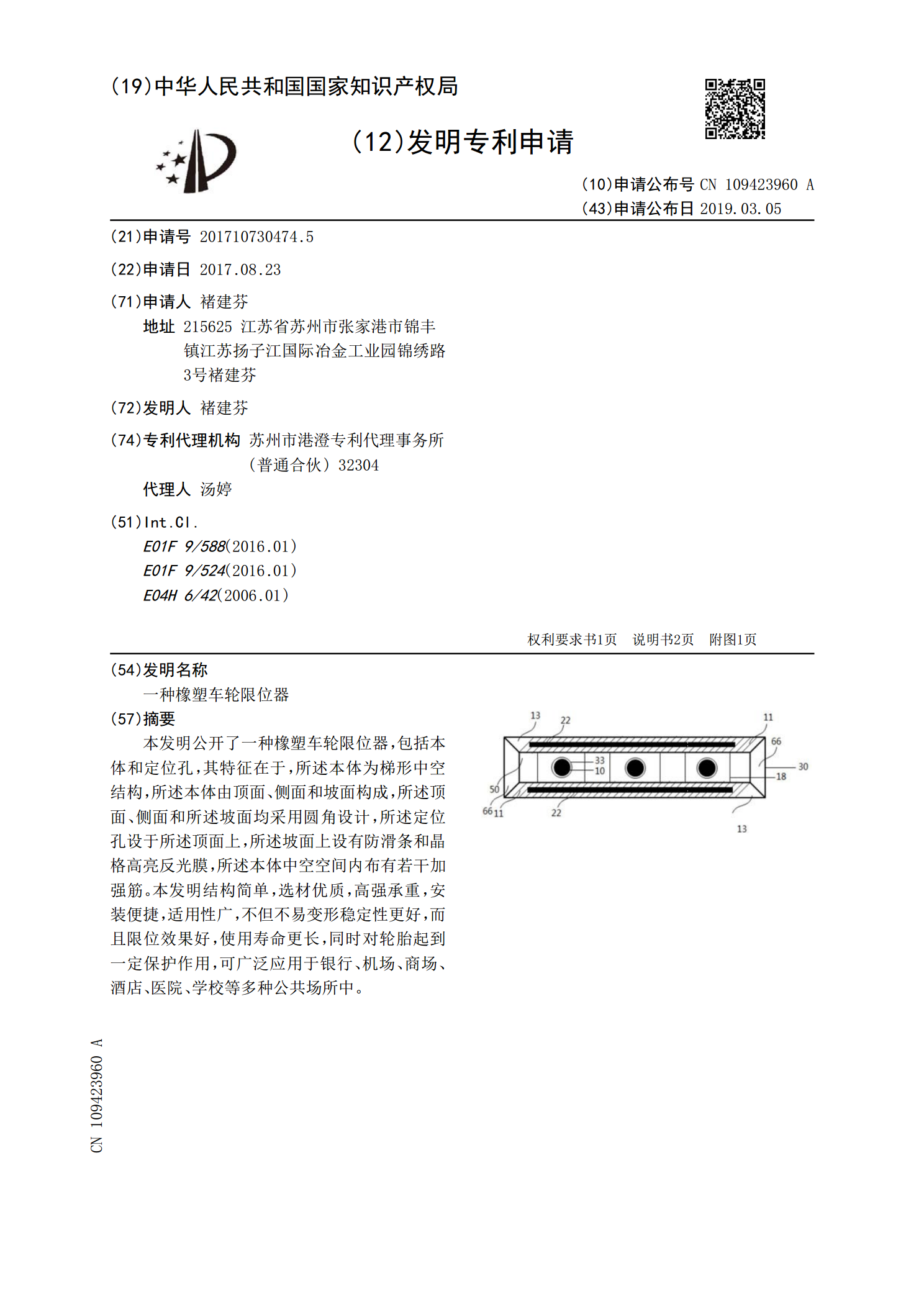
本发明公开了一种橡塑车轮限位器,包括本体和定位孔,其特征在于,所述本体为梯形中空结构,所述本体由顶面、侧面和坡面构成,所述顶面、侧面和所述坡面均采用圆角设计,所述定位孔设于所述顶面上,所述坡面上设有防滑条和晶格高亮反光膜,所述本体中空空间内布有若干加强筋。本发明结构简单,选材优质,高强承重,安装便捷,适用性广,不但不易变形稳定性更好,而且限位效果好,使用寿命更长,同时对轮胎起到一定保护作用,可广泛应用于银行、机场、商场、酒店、医院、学校等多种公共场所中。