
机器人腿足装置.pdf

Th****s3

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人腿足装置.pdf
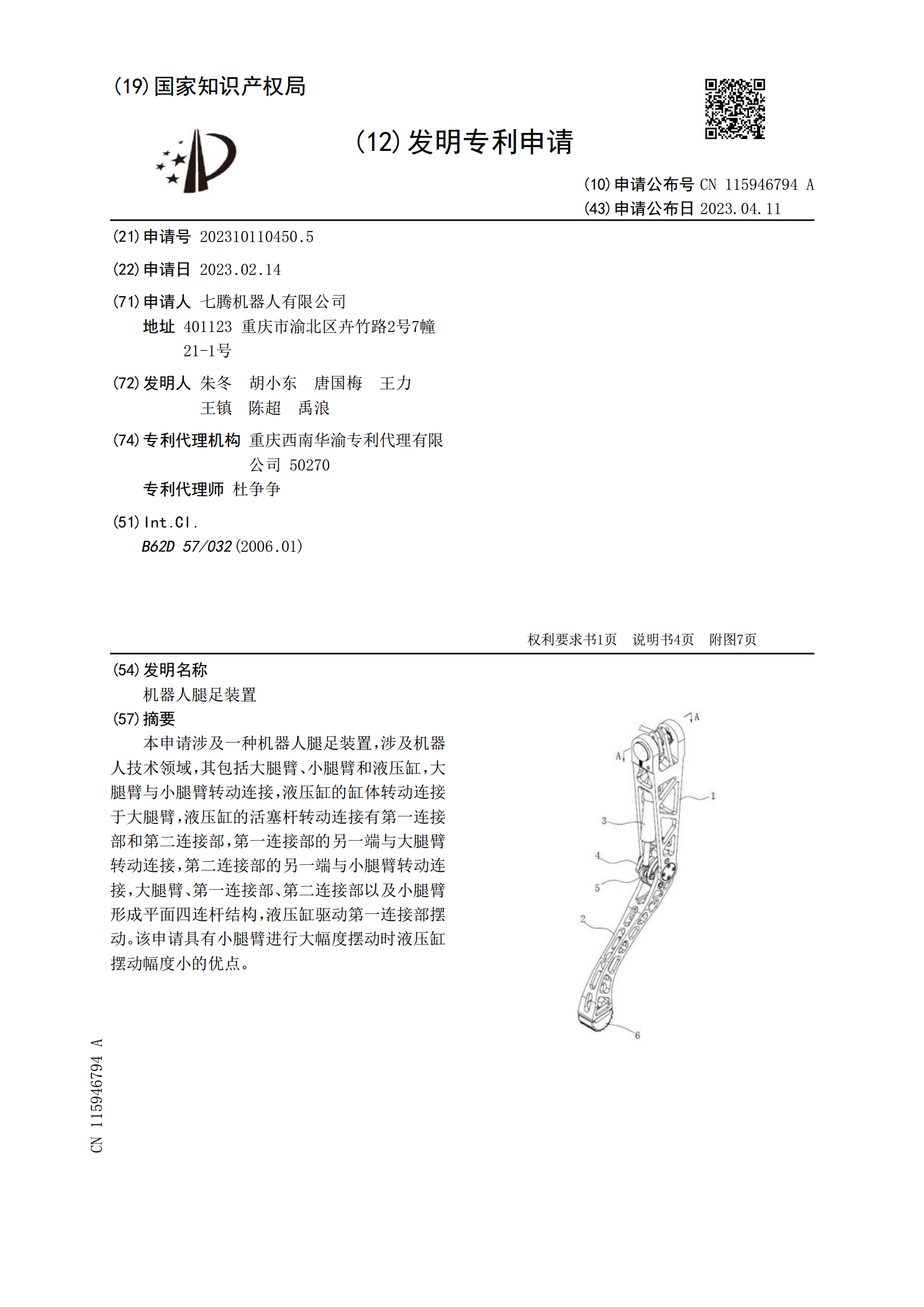
本申请涉及一种机器人腿足装置,涉及机器人技术领域,其包括大腿臂、小腿臂和液压缸,大腿臂与小腿臂转动连接,液压缸的缸体转动连接于大腿臂,液压缸的活塞杆转动连接有第一连接部和第二连接部,第一连接部的另一端与大腿臂转动连接,第二连接部的另一端与小腿臂转动连接,大腿臂、第一连接部、第二连接部以及小腿臂形成平面四连杆结构,液压缸驱动第一连接部摆动。该申请具有小腿臂进行大幅度摆动时液压缸摆动幅度小的优点。

一种足式机器人的腿足弹性装置.pdf
本发明公开了一种足式机器人的腿足弹性装置,包括第一足板和第二足板,所述第一足板顶部的中心处固定连接有连接杆的下端,且第一足板的内部开设有内腔,并且内腔的内部放置有活动板,所述内腔的底部预留有通槽,且通槽的内部贯穿有连接板,并且连接板的顶部固定连接于活动板底部的中心处,所述连接板的底部固定连接有第二足板,且第二足板的底部设置有橡胶防滑块;本发明通过设置有第一弹簧、减震橡胶、第二弹簧和第三弹簧,保证了机器人在行走时,具有四重缓冲的效果,从而对机器人内部的精密零件起到了良好的保护作用,延长了机器人的使用寿命。
腿足式机器人.pdf
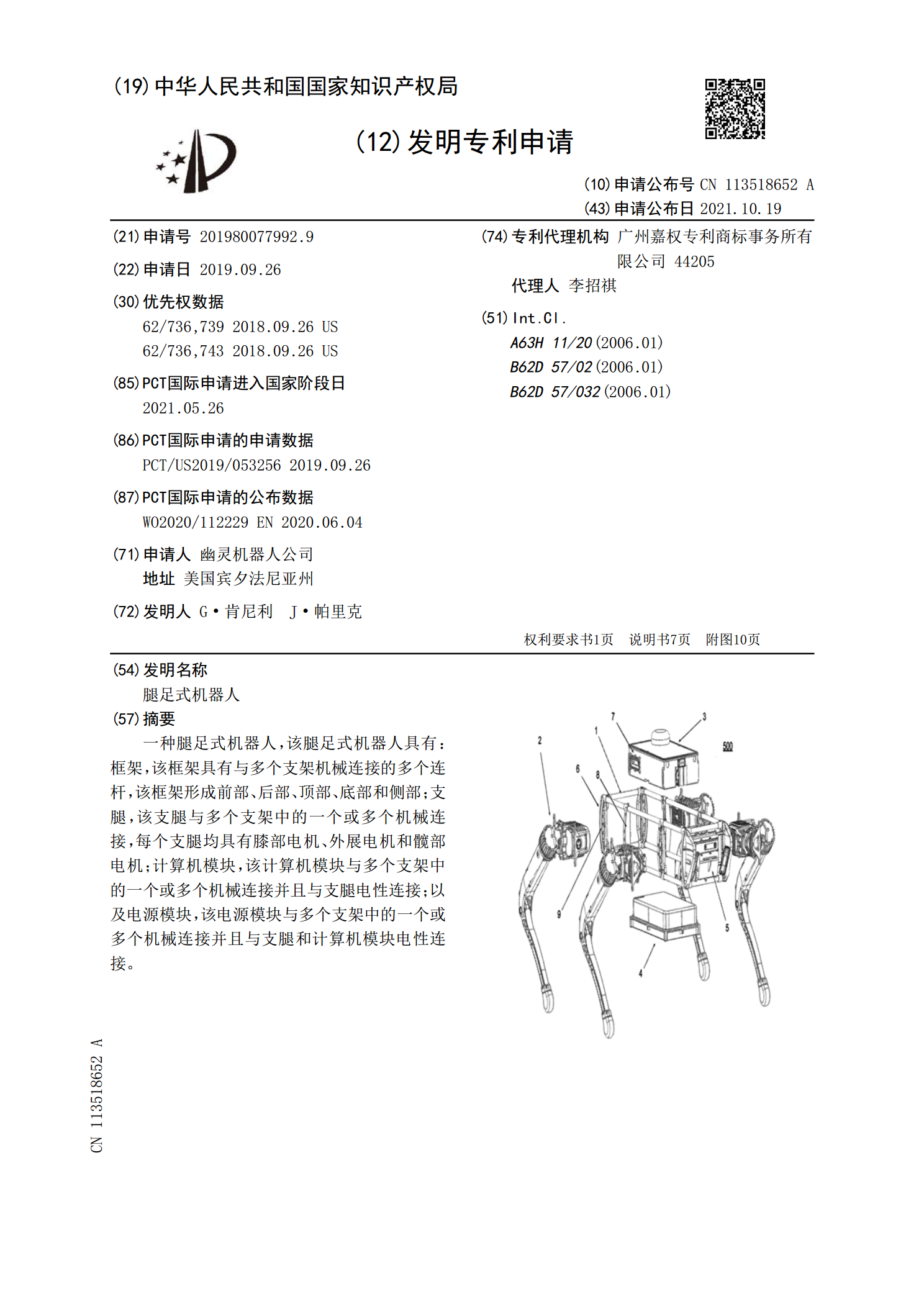
一种腿足式机器人,该腿足式机器人具有:框架,该框架具有与多个支架机械连接的多个连杆,该框架形成前部、后部、顶部、底部和侧部;支腿,该支腿与多个支架中的一个或多个机械连接,每个支腿均具有膝部电机、外展电机和髋部电机;计算机模块,该计算机模块与多个支架中的一个或多个机械连接并且与支腿电性连接;以及电源模块,该电源模块与多个支架中的一个或多个机械连接并且与支腿和计算机模块电性连接。

机器人的轮足式变形腿足机构.pdf
本发明公开了一种机器人的轮足式变形腿足机构,本体支撑件中包括一个本体支撑件伺服电机,其传动连接连接部一端以带动本体抬升或下降;连接部另一端连接固定于主腿,经连接部的牵引使得主腿和本体连动;主腿包括一个主腿伺服电机,其带动主腿相对于连接部运转;小腿包括一个小腿伺服电机,小腿一端经转轴铰链连接于主腿底部,小腿绕转轴相对于主腿成0°~90°夹角转动,小腿伺服电机传动连接轮足以实现轮式运动;还包括一个柔性牵拉部件,连接固定于小腿与主腿之间。本发明的腿部结构在足式行走中将小腿伺服电机收缩于主腿内,结构变形即可成轮式

偏心轮腿六足机器人.pdf
偏心轮腿六足机器人,采用偏心轮结构作为腿的形式,机身结构采用对称设计并呈扁平狭长体型。该机器人包括机身框架、偏心轮、电机、电源、光电编码器、控制电路、遥控器。机器人能克服传统腿结构的功耗剧烈振荡,并保证了前进、后退、左右转向功能完整性。该机器人地表适应性强,较宽的偏心轮腿不仅适合平整硬质地表,草地、沙滩、碎石等地表都能行走;该机器人越障能力强,能轻松跨越略低于机身高度的障碍物。