
车体减振控制装置.pdf

雨巷****碧易


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车体减振控制装置.pdf
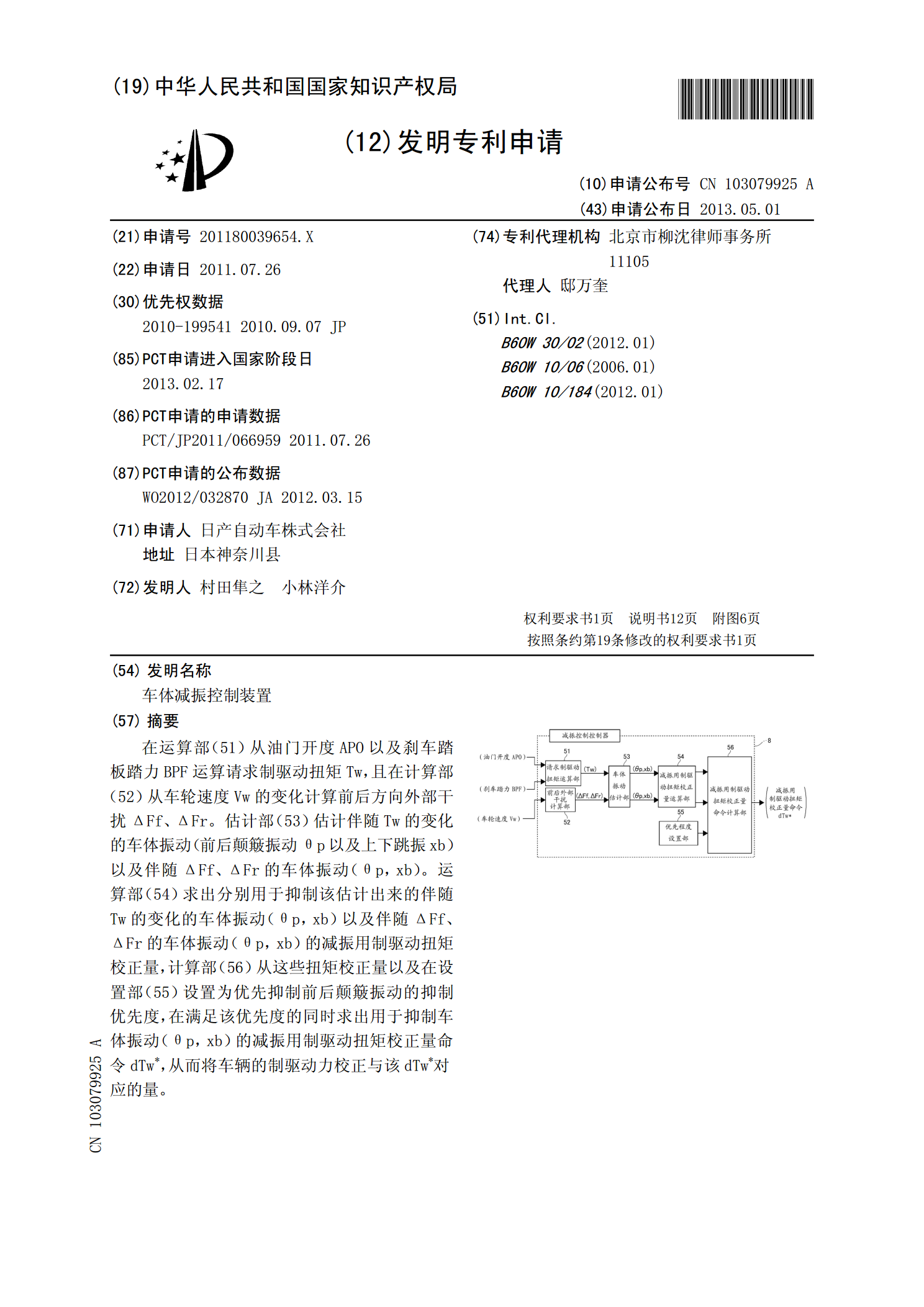
在运算部(51)从油门开度APO以及刹车踏板踏力BPF运算请求制驱动扭矩Tw,且在计算部(52)从车轮速度Vw的变化计算前后方向外部干扰ΔFf、ΔFr。估计部(53)估计伴随Tw的变化的车体振动(前后颠簸振动θp以及上下跳振xb)以及伴随ΔFf、ΔFr的车体振动(θp,xb)。运算部(54)求出分别用于抑制该估计出来的伴随Tw的变化的车体振动(θp,xb)以及伴随ΔFf、ΔFr的车体振动(θp,xb)的减振用制驱动扭矩校正量,计算部(56)从这些扭矩校正量以及在设置部(55)设置为优先抑制前后颠簸振动的抑

车体振动估计装置以及使用它的车体减振控制装置.pdf
由运算部(31、32)对平均前轮速度VwF=(VwFL+VwFR)/2和平均后轮速度VwR=(VwRL+VwRR)/2进行运算,使上述VwF、VwR通过带通滤波处理部(33、34)来仅抽取出车体谐振频率附近的成分,获取表示车体振动的前轮速度(VwF)的车体谐振频率附近振动成分和后轮速度(VwR)的车体谐振频率附近振动成分(fVwR)。在运算部(35、36)中,根据fVwF、fVwR求出表示车体振动的前轮的前后方向位移(Xtf)和后轮的前后方向位移(Xt?r),基于由悬架几何所决定的前轮和后轮的前后位移与上
减振控制装置以及减振控制方法.pdf
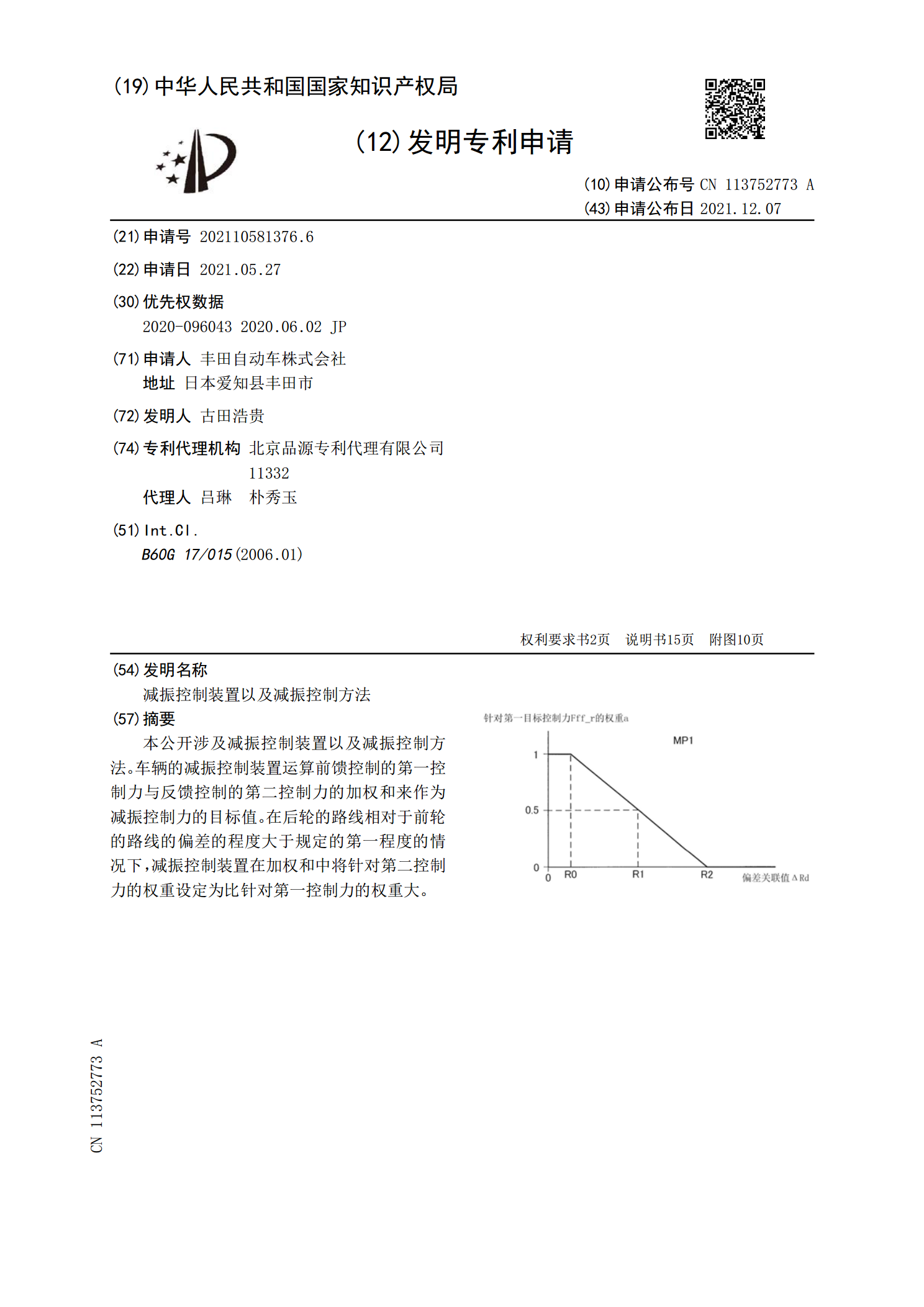
本公开涉及减振控制装置以及减振控制方法。车辆的减振控制装置运算前馈控制的第一控制力与反馈控制的第二控制力的加权和来作为减振控制力的目标值。在后轮的路线相对于前轮的路线的偏差的程度大于规定的第一程度的情况下,减振控制装置在加权和中将针对第二控制力的权重设定为比针对第一控制力的权重大。

减振控制装置.pdf
进行通过调节在车辆(10)所具有的车轮(12)产生的转矩来抑制车辆(10)上产生的簧上振动的控制即减振控制的减振控制装置(1)中,在作为车辆(10)的动力源的发动机(22)运转时的空燃比学习期间,使能够抑制簧上振动的减振用的转矩即减振转矩的大小与未进行空燃比学习时不同,从而禁止减振控制。由此,能够抑制减振控制与空燃比的学习校正的控制干涉的情况。因此,能够更可靠地进行空燃比的学习校正,能够更可靠地使空燃比成为所希望的空燃比,所以,对应于此,能够使废气的特性为所希望的特性,能够通过催化剂(82)有效地净化废气

减振控制装置.pdf
通过控制电动机(10)的转矩来进行抑制因从路面向车辆(1)所具有的车轮(20)的输入而在车辆(1)上产生的簧上振动,根据向电动机(10)供给电力的蓄电池(14)的电压及温度等蓄电池(14)的状态、或充放电量反馈控制等对蓄电池(14)的电力造成影响的控制的状态,包括禁止在内对该簧上减振进行限制。由此,在担心难以适当地进行簧上减振的状态或蓄电池(14)容易劣化的状态、进而担心与其他控制发生干涉的状态的情况下,能够限制簧上减振。因此,能够在根据需要使控制让步的状态下执行簧上减振,能够适当地执行簧上减振控制及其他