
基于ADAMS的灾害救援机器人姿态规划与越障分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于ADAMS的灾害救援机器人姿态规划与越障分析.docx
基于ADAMS的灾害救援机器人姿态规划与越障分析随着近年来各种自然灾害频繁发生,灾害救援机器人的重要性越来越引起人们的关注。机器人的姿态规划和越障分析是机器人进行救援任务的重要技术之一。本文基于ADAMS软件,介绍了灾害救援机器人姿态规划和越障分析的原理和方法。一、灾害救援机器人姿态规划灾害救援机器人需要能够在不同地形和环境中自主行动,因此姿态规划是非常重要的。姿态规划包括机器人的定位、姿态估计和路径规划。定位是指机器人在空间中的位置和方向。常用的定位方式有GPS定位、IMU惯性导航等。GPS定位精度较高

基于ADAMS的救援机器人越障过程分析及仿真.docx
基于ADAMS的救援机器人越障过程分析及仿真随着科技的不断发展,救援机器人已经成为救援行业中不可或缺的一部分,能够在地震、火灾等自然灾害中进行救援。在救援过程中,经常会遇到越障的情况,而机器人如何进行越障,一直是工程师们关注的问题。本文将基于ADAMS,对救援机器人的越障过程进行分析和仿真。首先,我们需要了解救援机器人的基本构成。救援机器人一般由底盘、机械臂等部分组成,能够通过传感器收集环境信息,从而实现自主导航和控制。底盘是机器人的基础部件,决定了机器人的移动能力和稳定性。机械臂是机器人的操作部件,用于

基于ADAMS的装车机器人运动分析.docx
基于ADAMS的装车机器人运动分析随着物流行业的迅猛发展,物流仓储设备的智能化、灵活化、高效化水平也不断提高。装车机器人作为物流设备中的重要组成部分,已经广泛应用于汽车、电子、机械等领域,为企业解决了缺工、保障安全等问题,提升了生产效率和产品质量。装车机器人的运动控制,是实现机器人精确高效工作的重要环节。本文以装车机器人的运动控制为研究对象,使用ADAMS软件进行运动模拟与分析,旨在探究如何优化装车机器人的运动控制,提高其工作效率和精度。一、装车机器人的组成和工作原理装车机器人通常由机器人主体、机械臂、夹
一种基于并联机构的越障救援机器人.pdf
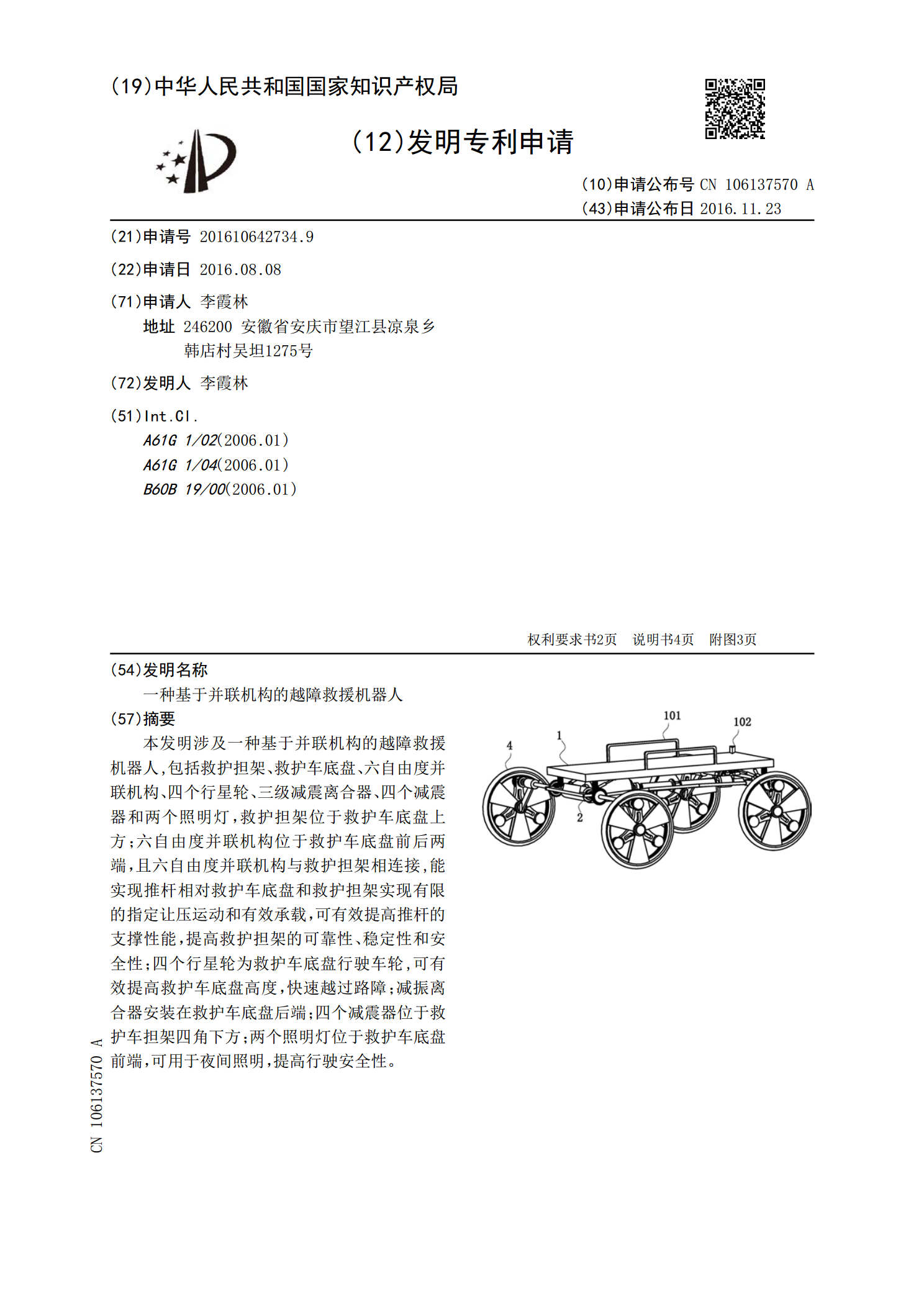
本发明涉及一种基于并联机构的越障救援机器人,包括救护担架、救护车底盘、六自由度并联机构、四个行星轮、三级减震离合器、四个减震器和两个照明灯,救护担架位于救护车底盘上方;六自由度并联机构位于救护车底盘前后两端,且六自由度并联机构与救护担架相连接,能实现推杆相对救护车底盘和救护担架实现有限的指定让压运动和有效承载,可有效提高推杆的支撑性能,提高救护担架的可靠性、稳定性和安全性;四个行星轮为救护车底盘行驶车轮,可有效提高救护车底盘高度,快速越过路障;减振离合器安装在救护车底盘后端;四个减震器位于救护车担架四角下

基于粒子群模糊的除冰机器人越障规划.docx
基于粒子群模糊的除冰机器人越障规划基于粒子群模糊的除冰机器人越障规划摘要:随着现代技术的不断发展,机器人应用领域越来越广泛,其中包括对道路除冰作业的需求。本文提出了一种基于粒子群模糊的除冰机器人越障规划方法。该方法综合考虑了除冰机器人的航速、路径规划和避障控制三个方面,通过粒子群算法和模糊控制相结合的方式实现了除冰机器人的智能化越障规划。实验结果表明,该方法在提高除冰机器人的越障能力和降低事故风险方面具有显著优势。关键词:除冰机器人;越障规划;粒子群算法;模糊控制1.引言道路除冰作业是在冬季气候条件下的重