
基于粒子群模糊的除冰机器人越障规划.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于粒子群模糊的除冰机器人越障规划.docx
基于粒子群模糊的除冰机器人越障规划基于粒子群模糊的除冰机器人越障规划摘要:随着现代技术的不断发展,机器人应用领域越来越广泛,其中包括对道路除冰作业的需求。本文提出了一种基于粒子群模糊的除冰机器人越障规划方法。该方法综合考虑了除冰机器人的航速、路径规划和避障控制三个方面,通过粒子群算法和模糊控制相结合的方式实现了除冰机器人的智能化越障规划。实验结果表明,该方法在提高除冰机器人的越障能力和降低事故风险方面具有显著优势。关键词:除冰机器人;越障规划;粒子群算法;模糊控制1.引言道路除冰作业是在冬季气候条件下的重

基于视觉的电力线除冰机器人越障抓线控制.docx
基于视觉的电力线除冰机器人越障抓线控制基于视觉的电力线除冰机器人越障抓线控制摘要:随着科技的不断发展,机器人技术在各个领域得到广泛应用,其中包括电力工业。在电力线路的维护和冰雪天气中,传统的人工除冰工作面临着高风险和低效率的问题。为了提高电力线路的安全性和运行效率,本文基于视觉的电力线除冰机器人越障抓线控制进行研究,旨在开发一种能够自主进行电力线除冰作业的机器人系统。关键词:机器人,电力线除冰,越障,抓线,视觉控制一、引言随着电力工业的发展,电力线路的维护和冰雪天气中变得越来越重要。传统的人工除冰工作存在

输电线除冰机器人的越障机构.pdf
本发明涉及一种输电线除冰机器人的越障机构,包括前后三套独立运行的由升降装置和转动装置构成的越障装置,升降装置安置在转动装置的转盘上,转动装置的转盘与安置在固定板上的转动电机连接,实现转盘的转动;所述升降装置顶部设置用于夹持输电线并可在输电线上滚动行走的滑轮,滑轮安置在伸缩立柱上,随伸缩立柱上升或下降,伸缩立柱与丝杆配合,丝杆通过联轴器与升降电机连接。该越障机构在实施越障时,升降装置的上下直线滑动和转动装置的转动是独立进行的,且互相协调和配合,通过上下直线滑动在高度上使滑轮离开输电线,通过转动在平面上绕过障

输电线路除冰机器人越障规划与跟踪方法研究的开题报告.docx
输电线路除冰机器人越障规划与跟踪方法研究的开题报告一、选题背景及意义输电线路的能源传输作用非常重要,但在冬季,由于恶劣的天气条件,输电线路上经常出现积雪以及结冰等问题,这些都会给电力传输带来不良的影响,因此通常需要对输电线路进行除冰处理以确保正常运行。但传统的手工除冰方式效率低下且危险,不利于人员的安全保障,因此需要开发一种智能的输电线路除冰机器人,以实现安全高效的除冰。本文将从除冰机器人的越障规划及跟踪方法进行研究,对于提高输电线路除冰效率、减少人员风险等方面有较大的意义和价值。二、研究目标通过建立输电
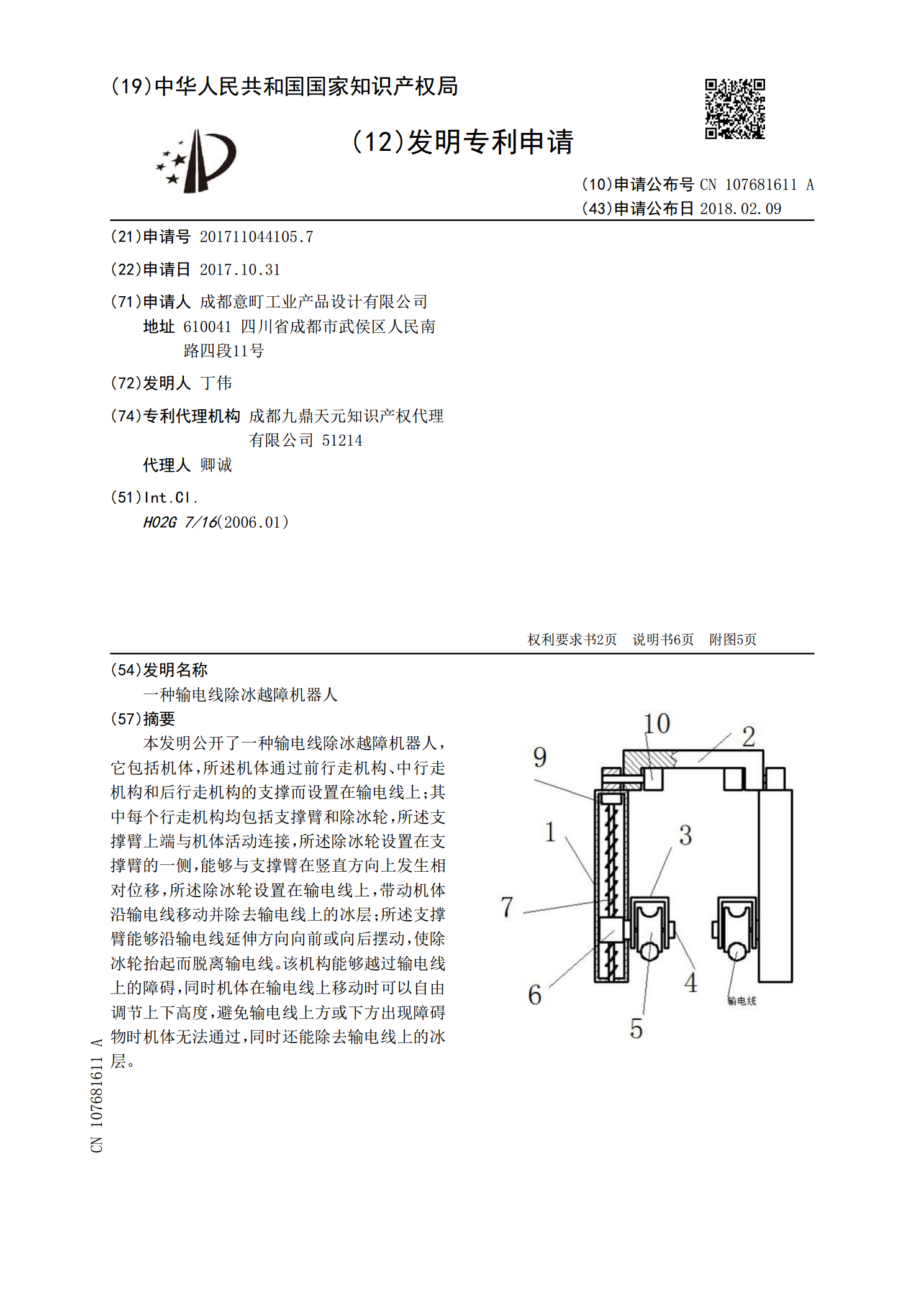
一种输电线除冰越障机器人.pdf
本发明公开了一种输电线除冰越障机器人,它包括机体,所述机体通过前行走机构、中行走机构和后行走机构的支撑而设置在输电线上;其中每个行走机构均包括支撑臂和除冰轮,所述支撑臂上端与机体活动连接,所述除冰轮设置在支撑臂的一侧,能够与支撑臂在竖直方向上发生相对位移,所述除冰轮设置在输电线上,带动机体沿输电线移动并除去输电线上的冰层;所述支撑臂能够沿输电线延伸方向向前或向后摆动,使除冰轮抬起而脱离输电线。该机构能够越过输电线上的障碍,同时机体在输电线上移动时可以自由调节上下高度,避免输电线上方或下方出现障碍物时机体无