
一种基于并联机构的越障救援机器人.pdf

书生****ma

1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于并联机构的越障救援机器人.pdf
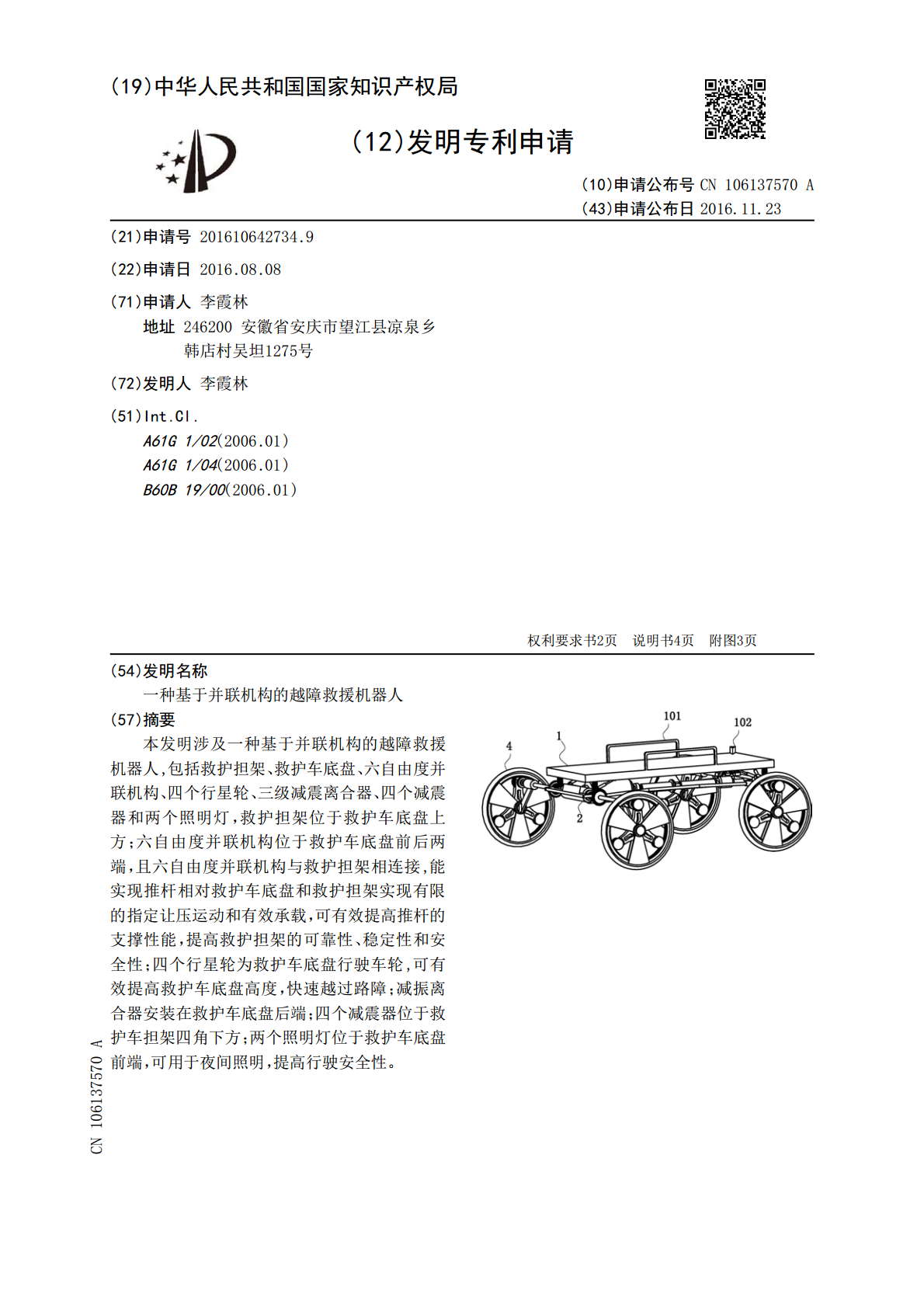
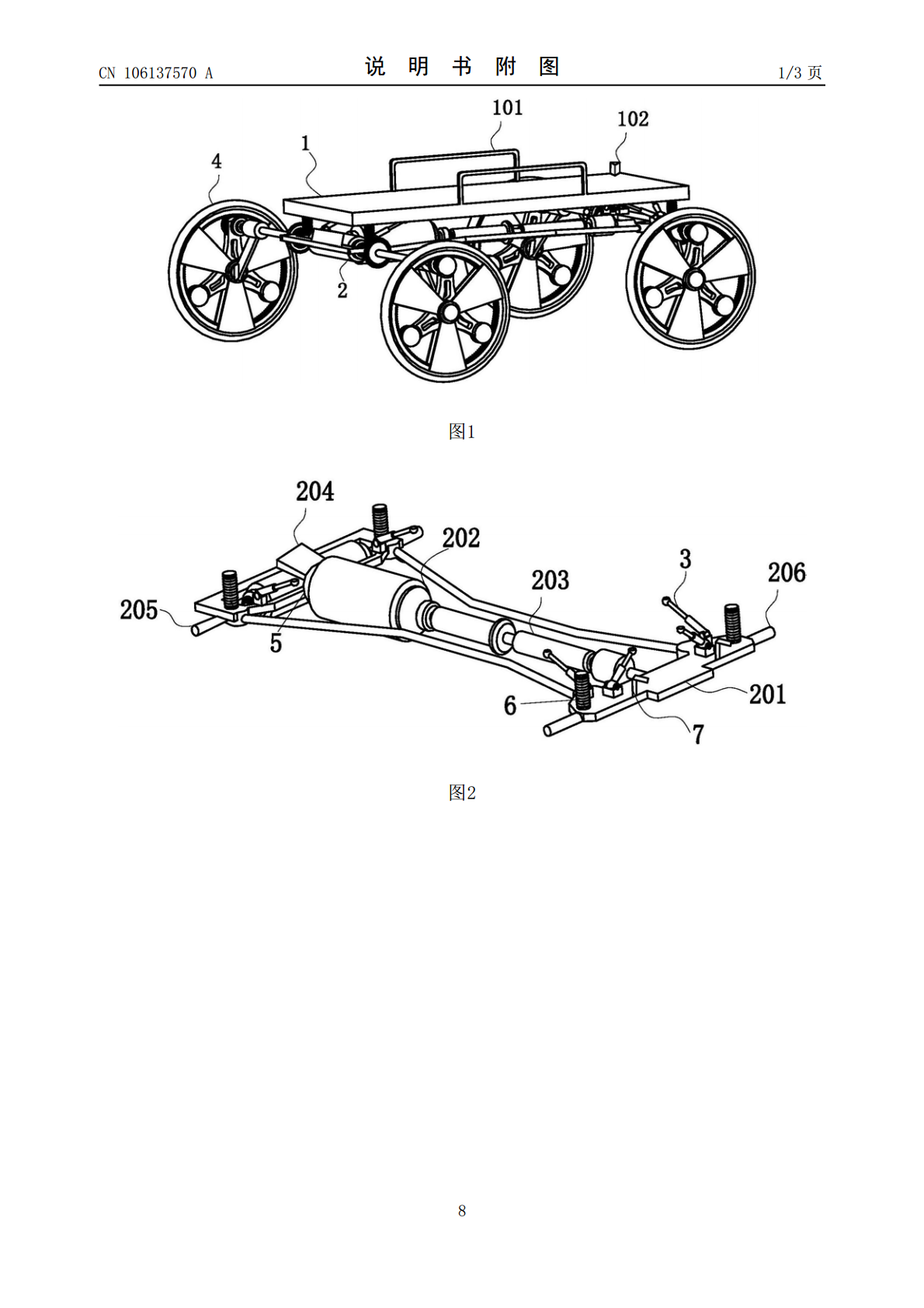
本发明涉及一种基于并联机构的越障救援机器人,包括救护担架、救护车底盘、六自由度并联机构、四个行星轮、三级减震离合器、四个减震器和两个照明灯,救护担架位于救护车底盘上方;六自由度并联机构位于救护车底盘前后两端,且六自由度并联机构与救护担架相连接,能实现推杆相对救护车底盘和救护担架实现有限的指定让压运动和有效承载,可有效提高推杆的支撑性能,提高救护担架的可靠性、稳定性和安全性;四个行星轮为救护车底盘行驶车轮,可有效提高救护车底盘高度,快速越过路障;减振离合器安装在救护车底盘后端;四个减震器位于救护车担架四角下

基于ADAMS的救援机器人越障过程分析及仿真.docx
基于ADAMS的救援机器人越障过程分析及仿真随着科技的不断发展,救援机器人已经成为救援行业中不可或缺的一部分,能够在地震、火灾等自然灾害中进行救援。在救援过程中,经常会遇到越障的情况,而机器人如何进行越障,一直是工程师们关注的问题。本文将基于ADAMS,对救援机器人的越障过程进行分析和仿真。首先,我们需要了解救援机器人的基本构成。救援机器人一般由底盘、机械臂等部分组成,能够通过传感器收集环境信息,从而实现自主导航和控制。底盘是机器人的基础部件,决定了机器人的移动能力和稳定性。机械臂是机器人的操作部件,用于

基于ADAMS的灾害救援机器人姿态规划与越障分析.docx
基于ADAMS的灾害救援机器人姿态规划与越障分析随着近年来各种自然灾害频繁发生,灾害救援机器人的重要性越来越引起人们的关注。机器人的姿态规划和越障分析是机器人进行救援任务的重要技术之一。本文基于ADAMS软件,介绍了灾害救援机器人姿态规划和越障分析的原理和方法。一、灾害救援机器人姿态规划灾害救援机器人需要能够在不同地形和环境中自主行动,因此姿态规划是非常重要的。姿态规划包括机器人的定位、姿态估计和路径规划。定位是指机器人在空间中的位置和方向。常用的定位方式有GPS定位、IMU惯性导航等。GPS定位精度较高

基于双6-UPU并联机构的步行机器人步行越障步态仿真与试验(英文).docx
基于双6-UPU并联机构的步行机器人步行越障步态仿真与试验(英文)Title:SimulationandExperimentalStudyofObstacle-CrossingGaitforaWalkingRobotBasedonaDouble6-UPUParallelMechanismAbstract:Thispaperpresentsastudyontheobstacle-crossinggaitforawalkingrobotusingadouble6-UPUparallelmechanism.Th
一种基于视觉的越障机器人.pdf
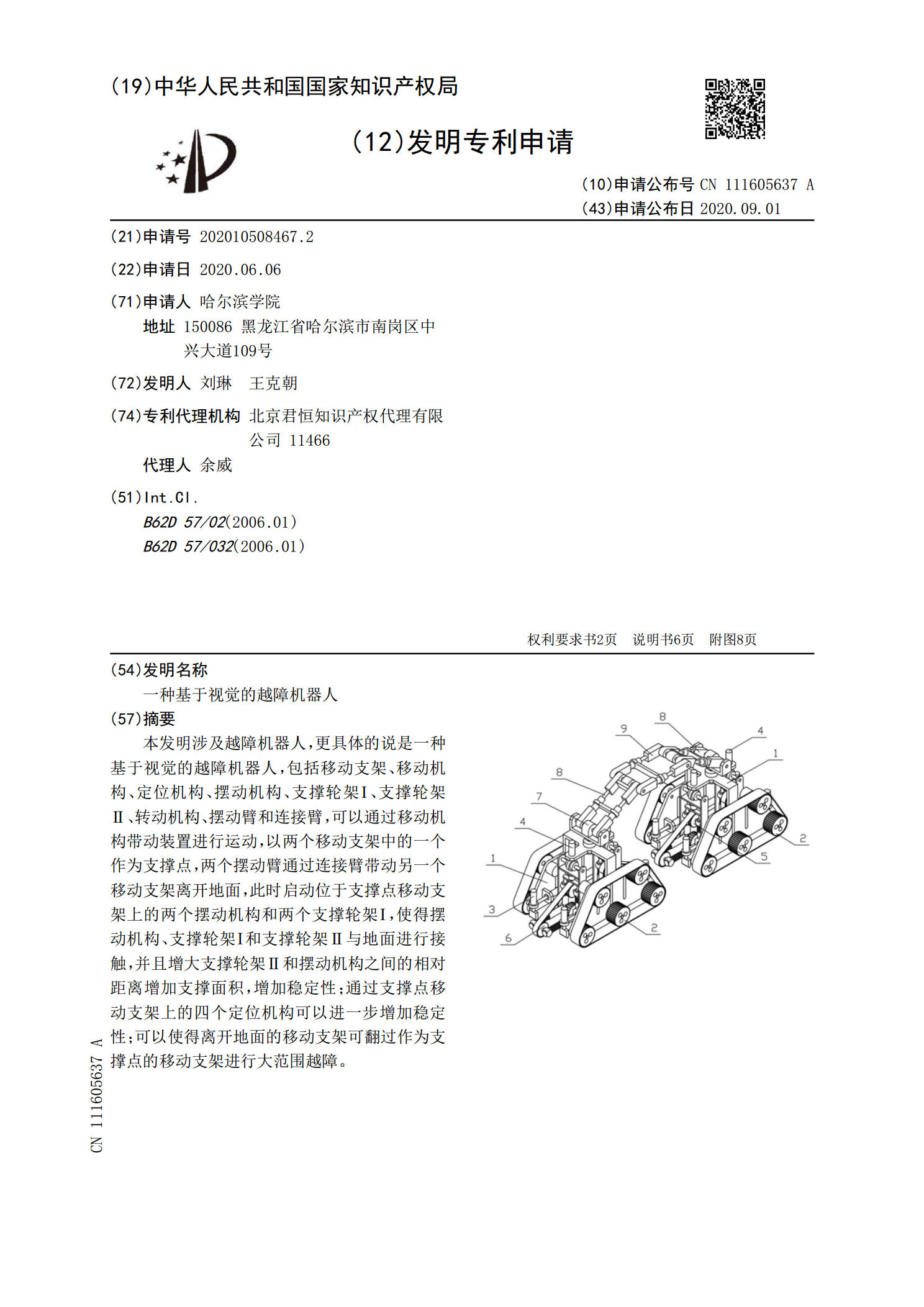
本发明涉及越障机器人,更具体的说是一种基于视觉的越障机器人,包括移动支架、移动机构、定位机构、摆动机构、支撑轮架Ⅰ、支撑轮架Ⅱ、转动机构、摆动臂和连接臂,可以通过移动机构带动装置进行运动,以两个移动支架中的一个作为支撑点,两个摆动臂通过连接臂带动另一个移动支架离开地面,此时启动位于支撑点移动支架上的两个摆动机构和两个支撑轮架Ⅰ,使得摆动机构、支撑轮架Ⅰ和支撑轮架Ⅱ与地面进行接触,并且增大支撑轮架Ⅱ和摆动机构之间的相对距离增加支撑面积,增加稳定性;通过支撑点移动支架上的四个定位机构可以进一步增加稳定性;可以