
工业机器人的锥齿轮装置、臂的腕部和调整侧隙的方法.pdf

冷霜****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

工业机器人的锥齿轮装置、臂的腕部和调整侧隙的方法.pdf
本发明涉及工业机器人的锥齿轮装置、工业机器人臂的腕部和调整侧隙的方法。一种用于调整工业机器人中的锥齿轮传动装置(7)中的侧隙的调整装置(1)。所述锥齿轮装置(7)包括第一圆锥齿轮(13)和第二圆锥齿轮(14),所述第一圆锥齿轮(13)具有第一转动轴线(A)。所述调整装置(1)包括可偏移地设置的保持构件(15),该保持构件(15)能够固定并可转动地安装所述第一齿轮(4)以绕所述第一转动轴线(A)转动。
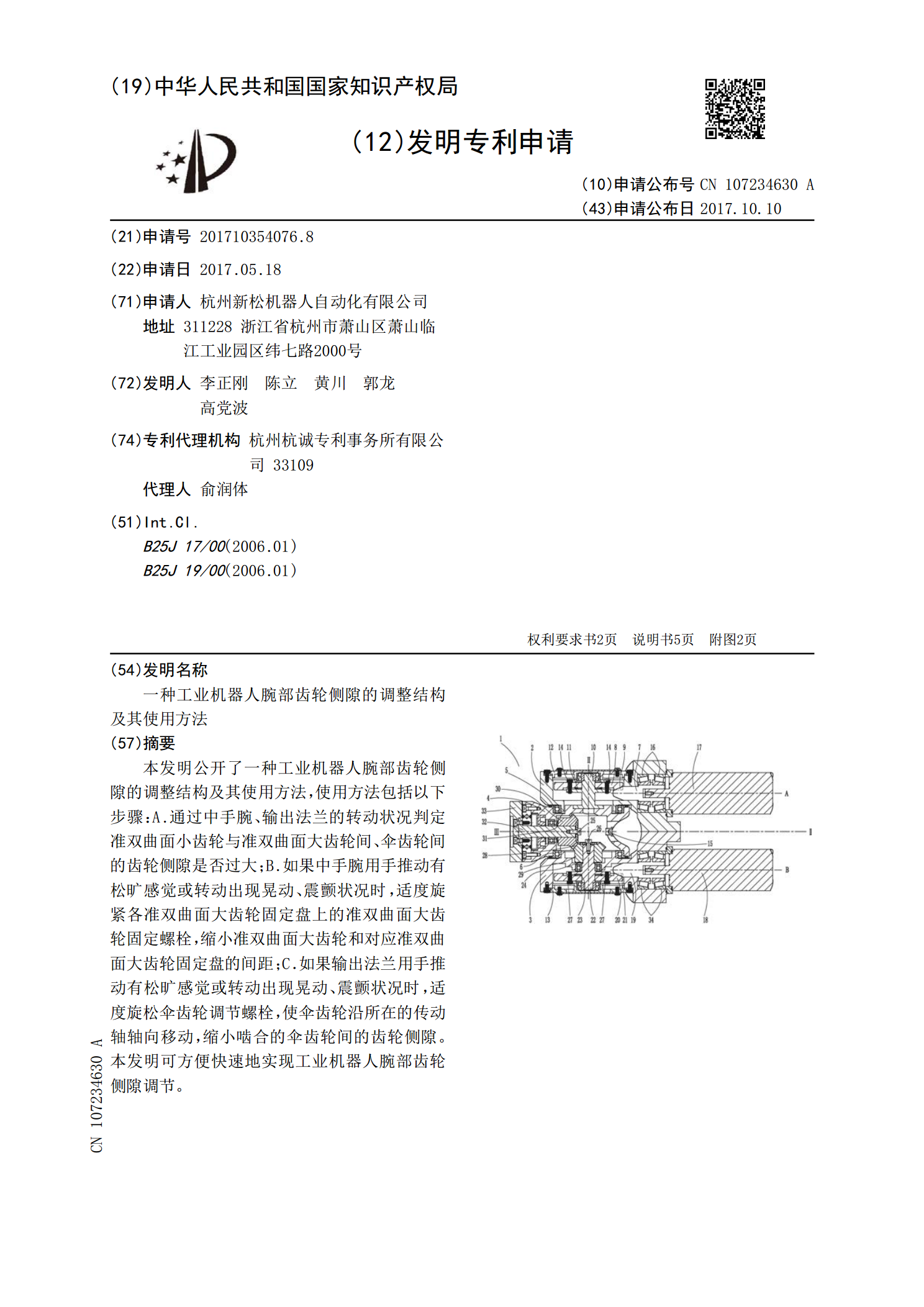
一种工业机器人腕部齿轮侧隙的调整结构及其使用方法.pdf
本发明公开了一种工业机器人腕部齿轮侧隙的调整结构及其使用方法,使用方法包括以下步骤:A.通过中手腕、输出法兰的转动状况判定准双曲面小齿轮与准双曲面大齿轮间、伞齿轮间的齿轮侧隙是否过大;B.如果中手腕用手推动有松旷感觉或转动出现晃动、震颤状况时,适度旋紧各准双曲面大齿轮固定盘上的准双曲面大齿轮固定螺栓,缩小准双曲面大齿轮和对应准双曲面大齿轮固定盘的间距;C.如果输出法兰用手推动有松旷感觉或转动出现晃动、震颤状况时,适度旋松伞齿轮调节螺栓,使伞齿轮沿所在的传动轴轴向移动,缩小啮合的伞齿轮间的齿轮侧隙。本发明可
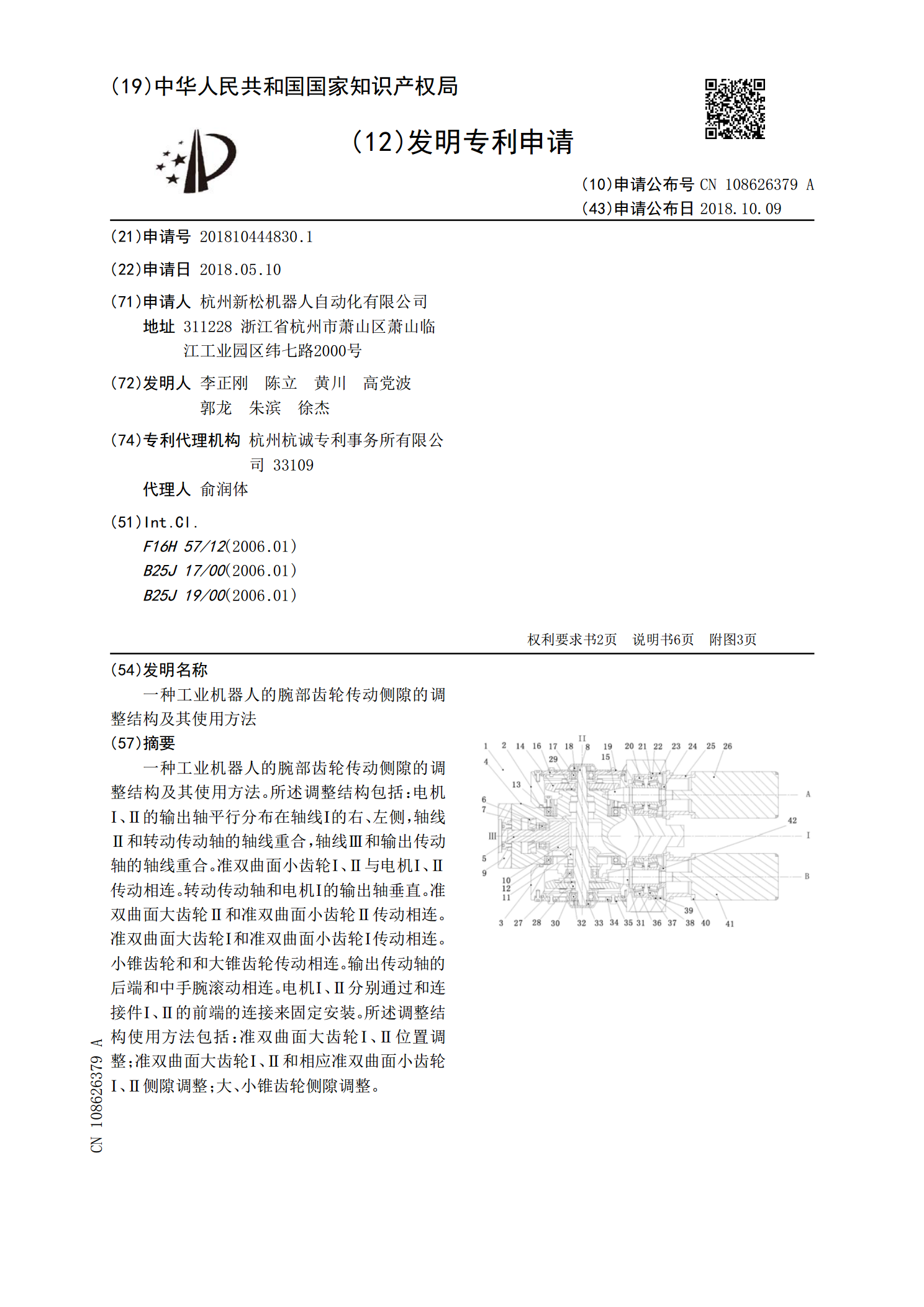
一种工业机器人的腕部齿轮传动侧隙的调整结构及其使用方法.pdf
一种工业机器人的腕部齿轮传动侧隙的调整结构及其使用方法。所述调整结构包括:电机Ⅰ、Ⅱ的输出轴平行分布在轴线Ⅰ的右、左侧,轴线Ⅱ和转动传动轴的轴线重合,轴线Ⅲ和输出传动轴的轴线重合。准双曲面小齿轮Ⅰ、Ⅱ与电机Ⅰ、Ⅱ传动相连。转动传动轴和电机Ⅰ的输出轴垂直。准双曲面大齿轮Ⅱ和准双曲面小齿轮Ⅱ传动相连。准双曲面大齿轮Ⅰ和准双曲面小齿轮Ⅰ传动相连。小锥齿轮和和大锥齿轮传动相连。输出传动轴的后端和中手腕滚动相连。电机Ⅰ、Ⅱ分别通过和连接件Ⅰ、Ⅱ的前端的连接来固定安装。所述调整结构使用方法包括:准双曲面大齿轮Ⅰ、Ⅱ位

齿轮侧隙调整装置及采用该调整装置的工业机器人.pdf
一种齿轮侧隙调整装置,用于调整工业机器人的圆柱齿轮装置中的侧隙,该圆柱齿轮装置包括相互啮合的第一齿轮与第二齿轮。第一齿轮沿其轴向位置固定,该第二齿轮沿其轴向可移动设置,该第一齿轮及第二齿轮沿轴向方向变位系数线性变化,且该第一齿轮变位系数较大端及较小端分别与第二齿轮的变位系数较小端及较大端对应啮合,该齿轮侧隙调整装置包括一个弹性件,该弹性件提供使第二齿轮轴向偏移以抵靠第一齿轮的弹力。上述调整装置可消除圆柱齿轮装置的侧隙。本发明还提供一种采用上述调整装置的工业机器人。
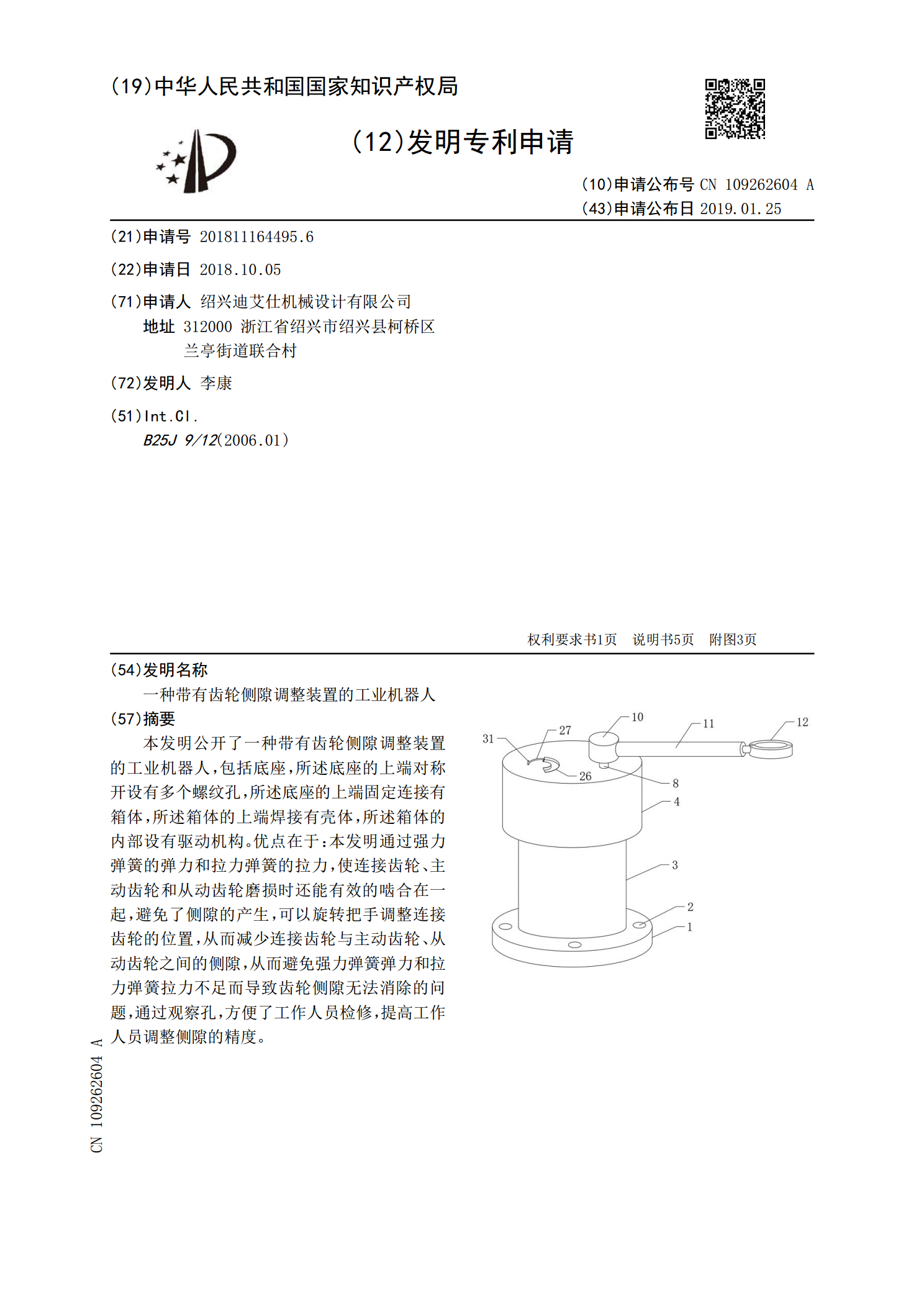
一种带有齿轮侧隙调整装置的工业机器人.pdf
本发明公开了一种带有齿轮侧隙调整装置的工业机器人,包括底座,所述底座的上端对称开设有多个螺纹孔,所述底座的上端固定连接有箱体,所述箱体的上端焊接有壳体,所述箱体的内部设有驱动机构。优点在于:本发明通过强力弹簧的弹力和拉力弹簧的拉力,使连接齿轮、主动齿轮和从动齿轮磨损时还能有效的啮合在一起,避免了侧隙的产生,可以旋转把手调整连接齿轮的位置,从而减少连接齿轮与主动齿轮、从动齿轮之间的侧隙,从而避免强力弹簧弹力和拉力弹簧拉力不足而导致齿轮侧隙无法消除的问题,通过观察孔,方便了工作人员检修,提高工作人员调整侧隙的