
轻型堆垛机器人货叉装置.pdf

a是****澜吖

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轻型堆垛机器人货叉装置.pdf
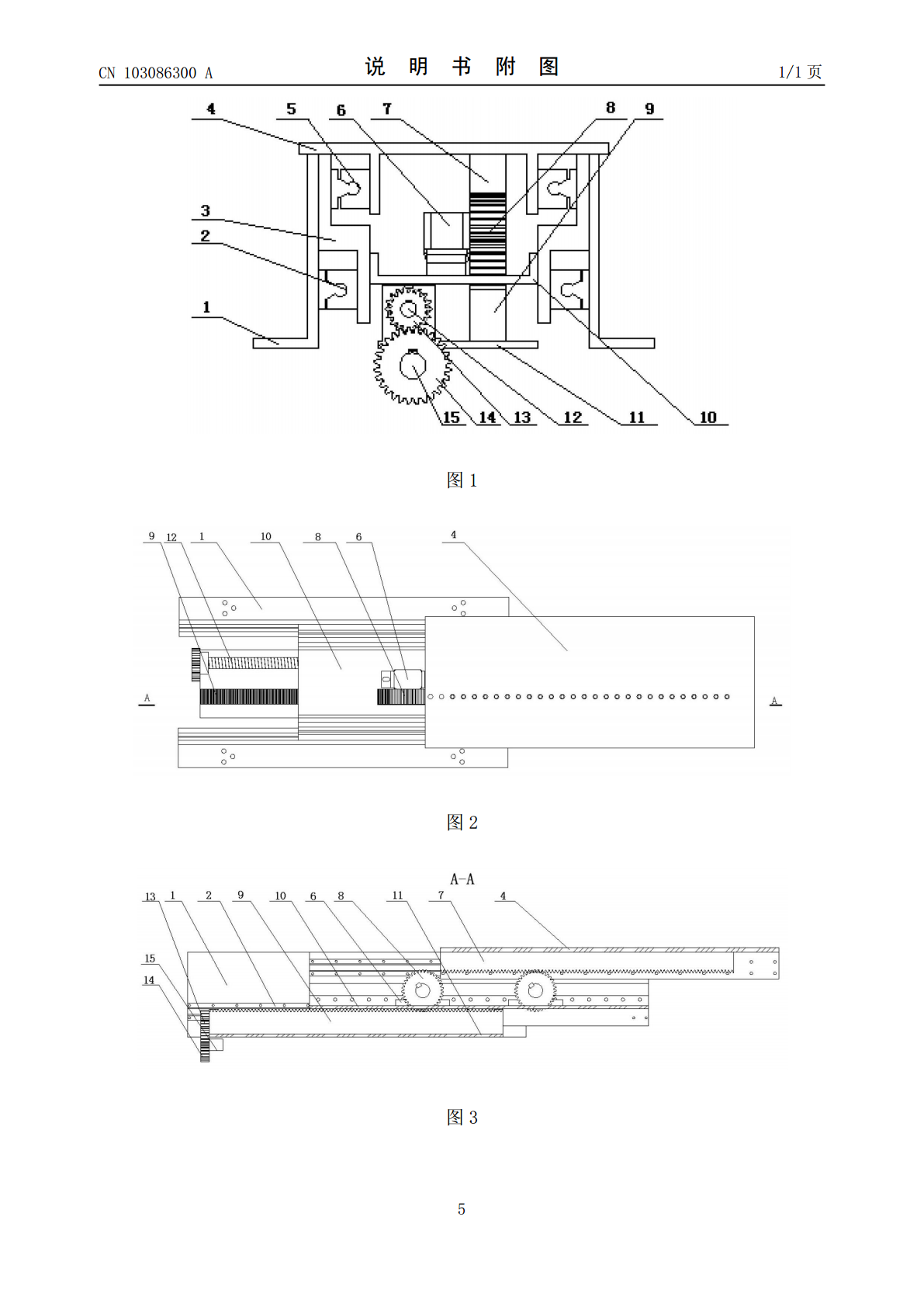
轻型堆垛机器人货叉装置,包括以中叉连扳连接的两个中叉,两个中叉的下方分别通过滑轨结构连接一个下叉,两个中叉的上方分别通过滑轨结构连接一个上叉,从而使得下叉、中叉和上叉能够在同一方向上往复滑动,本发明采用线性滑轨连接上中下叉,从而大大提高货叉装置的定位精度,同时有效的减小了因滚动连接的间隙而造成的噪音,本发明保证了上叉伸出长度满足叉送要求,实现货叉装置的差动连接,保证了传动的平稳性、运动精度和定位精度,也进一步减小了采用链轮装置传动带来的噪音,缩小了货叉装置的结构尺寸、减轻货叉装置的重量,在节省资源能源减小

一种堆垛机轻型双向货叉.pdf
本发明涉及一种堆垛机轻型双向货叉,它属于一种叠层式结构堆垛机货叉。本发明主要解决现有堆垛机货叉存在的机构不合理、自重大、占用空间大、安装调整不方便,加工制造难度大的技术问题,本发明为解决上述问题而采取的技术方案是:堆垛机轻型双向货叉,它包括上叉、中叉、下叉、钢丝绳,钢丝绳调节器、中叉滚轮、上叉导向螺栓轴承、中叉导向螺栓轴承、中叉传动齿条、下叉传动齿轮、联轴器、电机。上叉、中叉、下叉形成三层叠层式结构,电机通过联轴器与齿轮轴连接,电机驱动下叉齿轮,下叉齿轮通过中叉传动齿条使中叉能够向左、向右运动,而中叉的左

小型堆垛机器人货叉的优化设计.docx
小型堆垛机器人货叉的优化设计标题:小型堆垛机器人货叉的优化设计摘要:随着物流行业的发展,小型堆垛机器人货叉作为一种自动化物料搬运设备,在仓储领域得到广泛应用。本文旨在通过优化设计来提高小型堆垛机器人货叉的性能和效率。首先,对机器人的结构和工作原理进行了介绍,分析了目前存在的问题和挑战。然后,提出了一种基于传感器技术和智能控制算法的优化设计方案,并详细阐述了设计思路和实施步骤。最后,通过实验验证了优化设计的有效性,并对未来的研究方向进行了展望。关键词:小型堆垛机器人、货叉、优化设计、传感器技术、智能控制算法
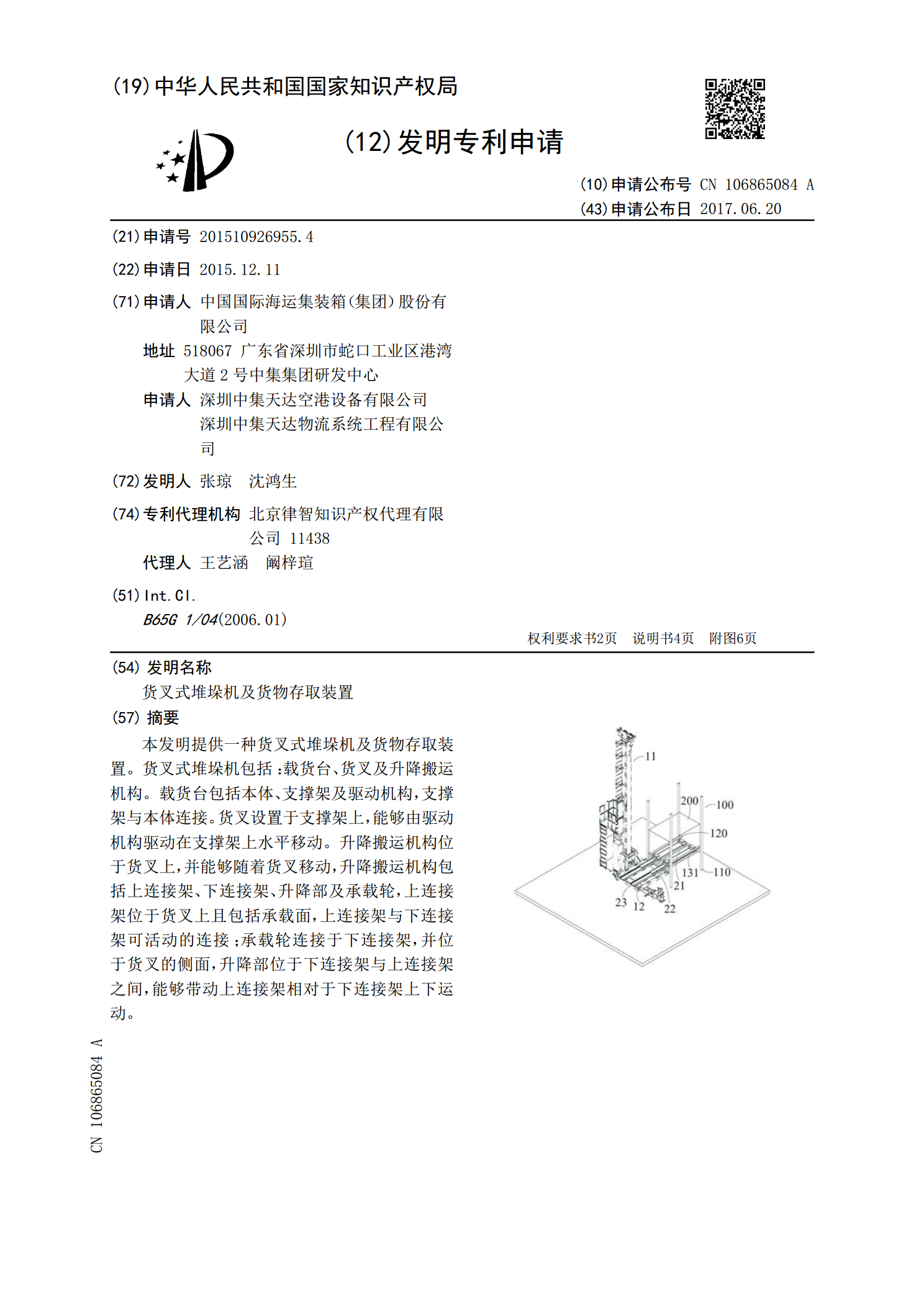
货叉式堆垛机及货物存取装置.pdf
本发明提供一种货叉式堆垛机及货物存取装置。货叉式堆垛机包括:载货台、货叉及升降搬运机构。载货台包括本体、支撑架及驱动机构,支撑架与本体连接。货叉设置于支撑架上,能够由驱动机构驱动在支撑架上水平移动。升降搬运机构位于货叉上,并能够随着货叉移动,升降搬运机构包括上连接架、下连接架、升降部及承载轮,上连接架位于货叉上且包括承载面,上连接架与下连接架可活动的连接;承载轮连接于下连接架,并位于货叉的侧面,升降部位于下连接架与上连接架之间,能够带动上连接架相对于下连接架上下运动。
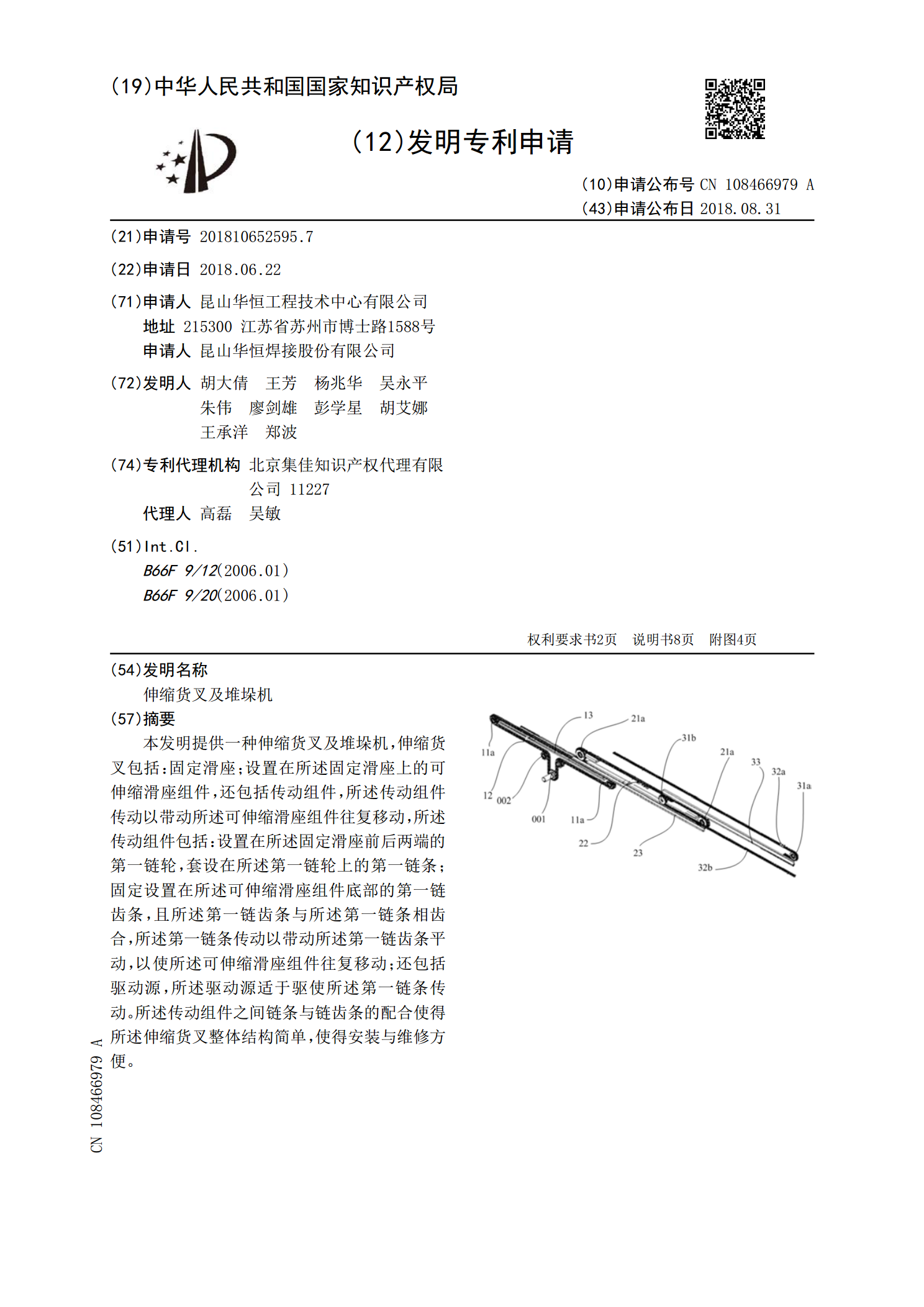
伸缩货叉及堆垛机.pdf
本发明提供一种伸缩货叉及堆垛机,伸缩货叉包括:固定滑座;设置在所述固定滑座上的可伸缩滑座组件,还包括传动组件,所述传动组件传动以带动所述可伸缩滑座组件往复移动,所述传动组件包括:设置在所述固定滑座前后两端的第一链轮,套设在所述第一链轮上的第一链条;固定设置在所述可伸缩滑座组件底部的第一链齿条,且所述第一链齿条与所述第一链条相齿合,所述第一链条传动以带动所述第一链齿条平动,以使所述可伸缩滑座组件往复移动;还包括驱动源,所述驱动源适于驱使所述第一链条传动。所述传动组件之间链条与链齿条的配合使得所述伸缩货叉整体