
用于自动化的多级换挡变速器的换挡控制的方法.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于自动化的多级换挡变速器的换挡控制的方法.pdf
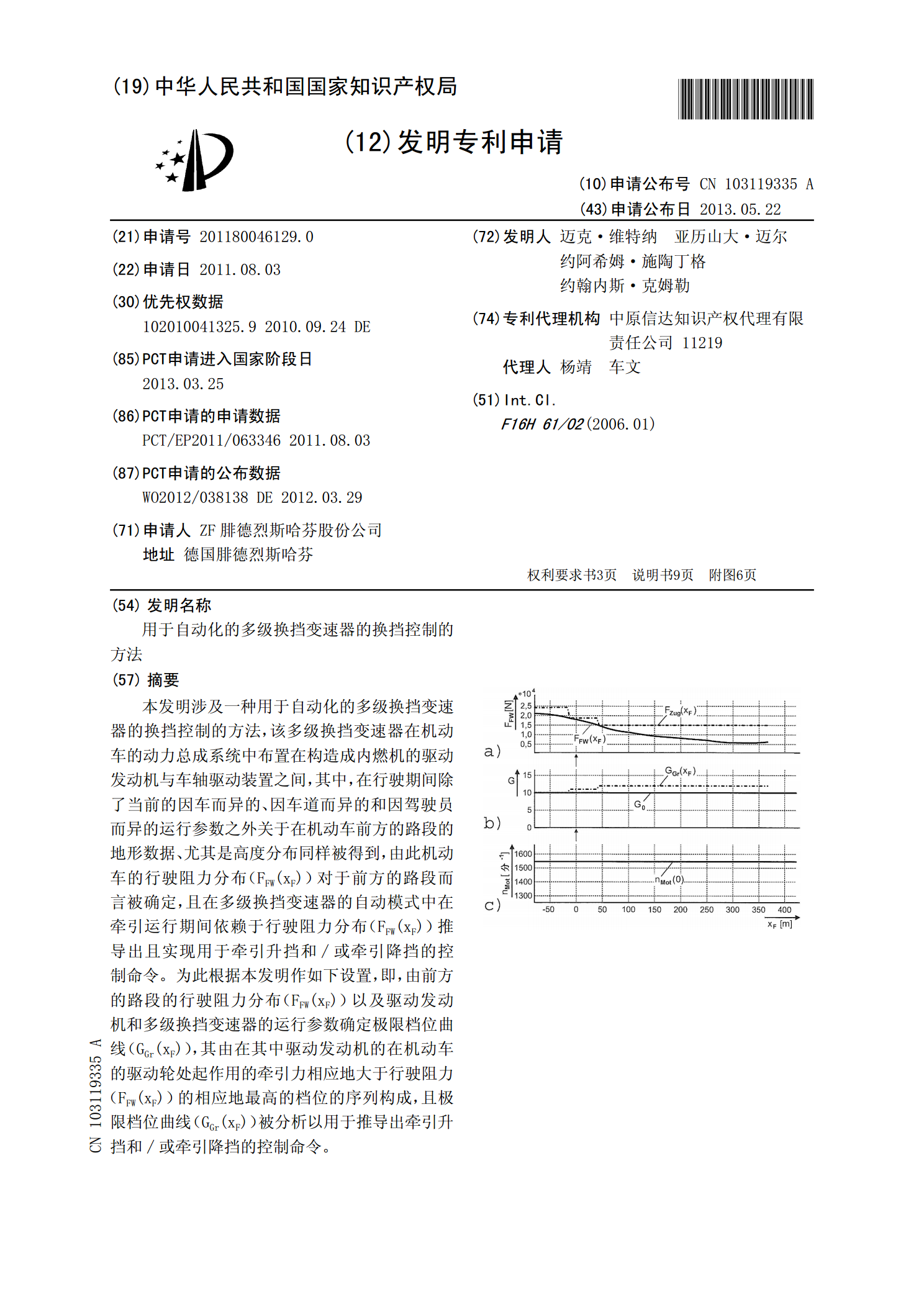
本发明涉及一种用于自动化的多级换挡变速器的换挡控制的方法,该多级换挡变速器在机动车的动力总成系统中布置在构造成内燃机的驱动发动机与车轴驱动装置之间,其中,在行驶期间除了当前的因车而异的、因车道而异的和因驾驶员而异的运行参数之外关于在机动车前方的路段的地形数据、尤其是高度分布同样被得到,由此机动车的行驶阻力分布(FFW(xF))对于前方的路段而言被确定,且在多级换挡变速器的自动模式中在牵引运行期间依赖于行驶阻力分布(FFW(xF))推导出且实现用于牵引升挡和/或牵引降挡的控制命令。为此根据本发明作如下设置,

用于换挡变速器的操纵设备和用于操纵换挡变速器的方法.pdf
本发明涉及一种用于换挡变速器(2)的操纵设备(1),所述操纵设备包括至少一个活塞(3)和换挡接合套(4),其中活塞(3)与换挡接合套(4)固定地连接。本发明还涉及一种用于借助操纵设备(1)来操纵换挡变速器(2)的方法,其中操纵设备(1)具有至少一个活塞(3)和与活塞(3)固定地连接的换挡接合套(4)以及与换挡接合套(4)抗扭地连接的同步体(5)。

用于控制变速器换挡的系统和方法.pdf
公开了用于控制变速器换挡的系统和方法。一种用于车辆中在制动事件期间控制变速器换挡的系统和方法,所述车辆具有均可操作以制动车辆的电动马达和摩擦制动器,所述方法包括在制动事件期间减小摩擦制动以增加车轮扭矩的步骤。制动事件包括摩擦制动和再生制动两者。减小摩擦制动以增加车轮扭矩是至少部分地基于在变速器换挡期间由阶梯传动比变速器的传动比改变而造成的车轮扭矩的减小的。

用于双离合变速器的换挡控制方法.pdf
本发明提供一种用于双离合变速器的换挡控制方法,包括以下步骤:S1:检测汽车是否满足1挡换挡使能条件;若是,则进入步骤S2。S2:检测3挡拨叉是否在位,若否,则进入步骤S4。S3:执行3挡退挡,并检测是否出现不可执行条件;若否,则检测3挡退挡是否完成;若是,则进入步骤S4。S4:执行奇数离合器结合,并检测是否出现不可执行条件;若否则检测是否满足挂1挡条件;若是,则进入步骤S5,若否,则回到步骤S4。S5:执行奇数离合器打开,并检测是否出现不可执行条件;若否,则判断奇数离合器是否打开;若否,则回到步骤S5,若

动力换挡多级变速器.pdf
本发明涉及一种用于车辆的行星齿轮结构方式所述的动力换挡多级变速器,该动力换挡多级变速器用于设置在驱动轴(AN)和从动轴(AB)之间,其特征在于,所述多级变速器包括两个平行的轴系(WS1、WS2)、六个切换元件(K1、K2、K3、K4、B1、B2)、至少两个正齿轮级(STS1、STS2)和三个行星齿轮组(P1、P2、P3),所述行星齿轮组(P1、P2、P3)分别包括一个太阳轮(SO1、SO2、SO3)、一个齿圈(HO1、HO2、HO3)和汇合为一个行星架(ST1、ST2、ST3)的带有多个行星齿轮的行星齿轮