
机器人用差速驱动结构.pdf

海昌****姐淑

1/9
2/9
3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人用差速驱动结构.pdf
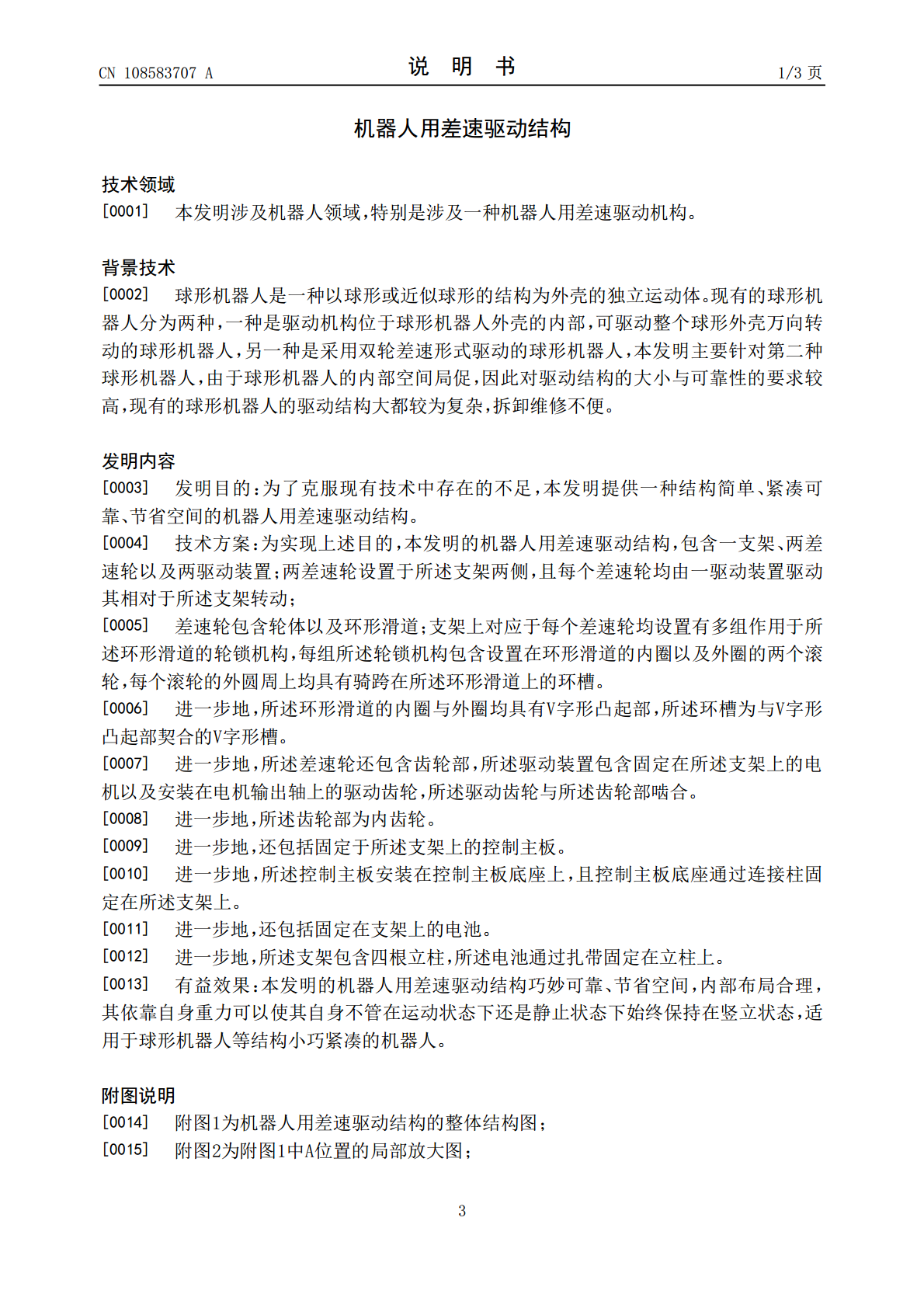
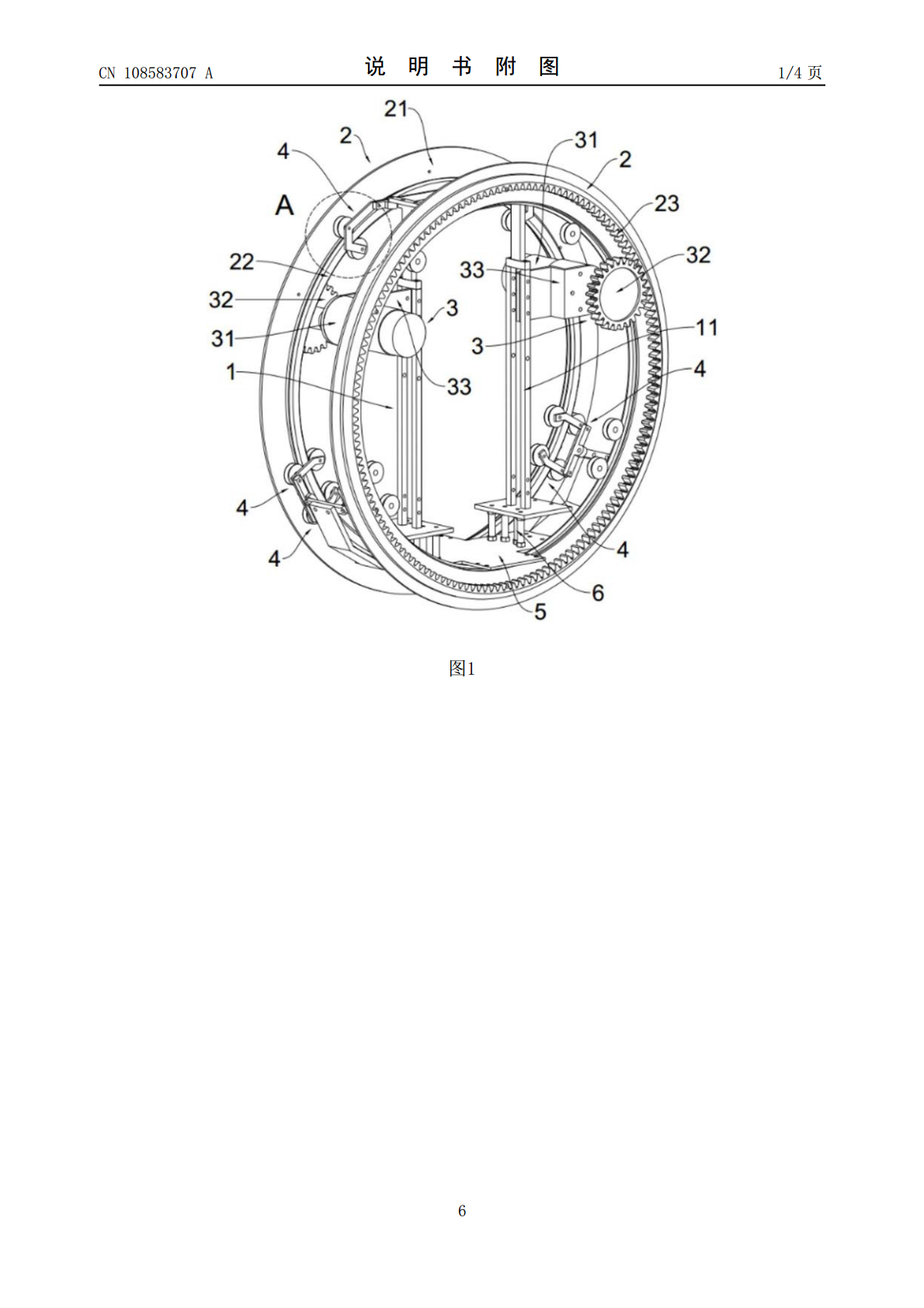
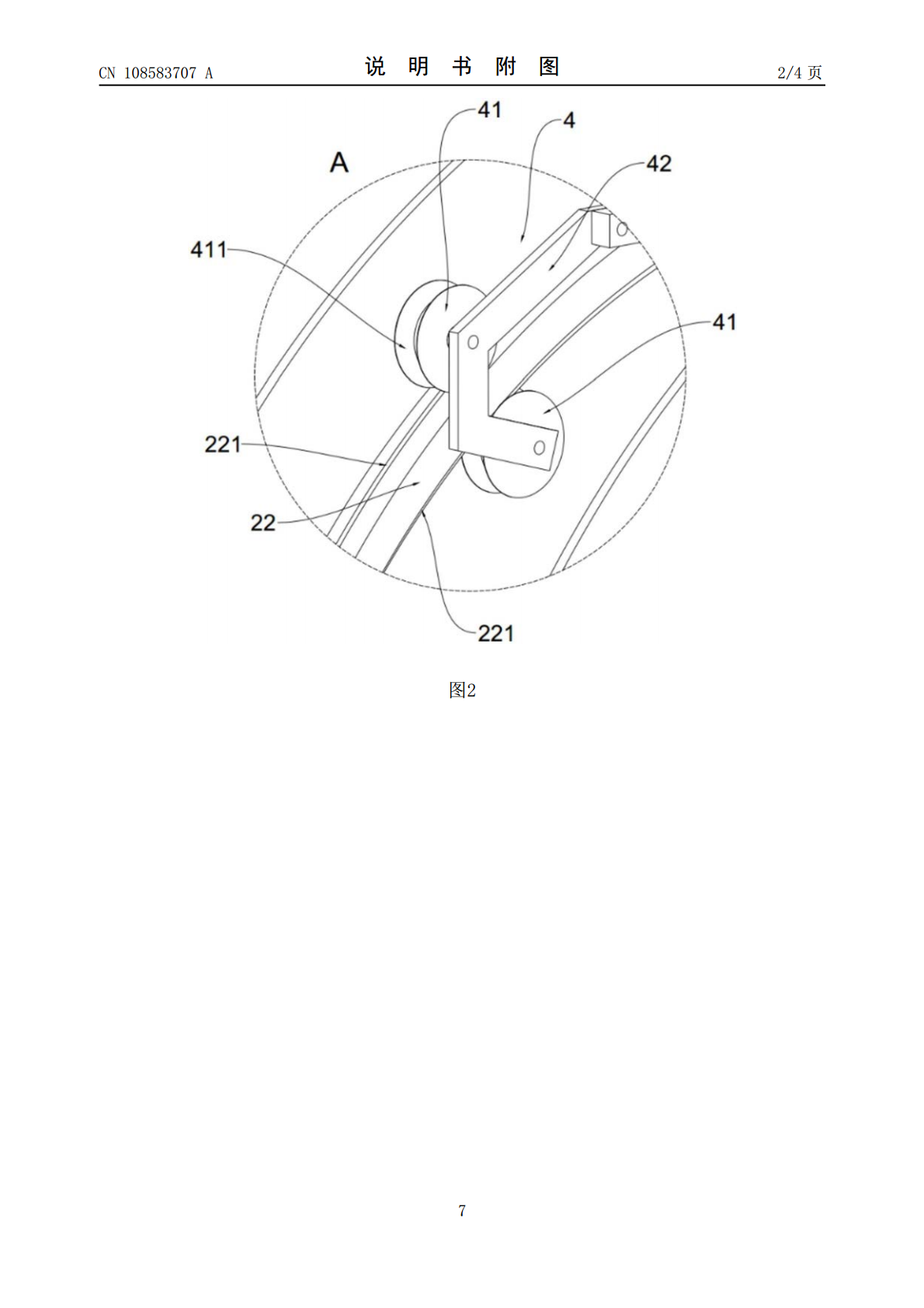
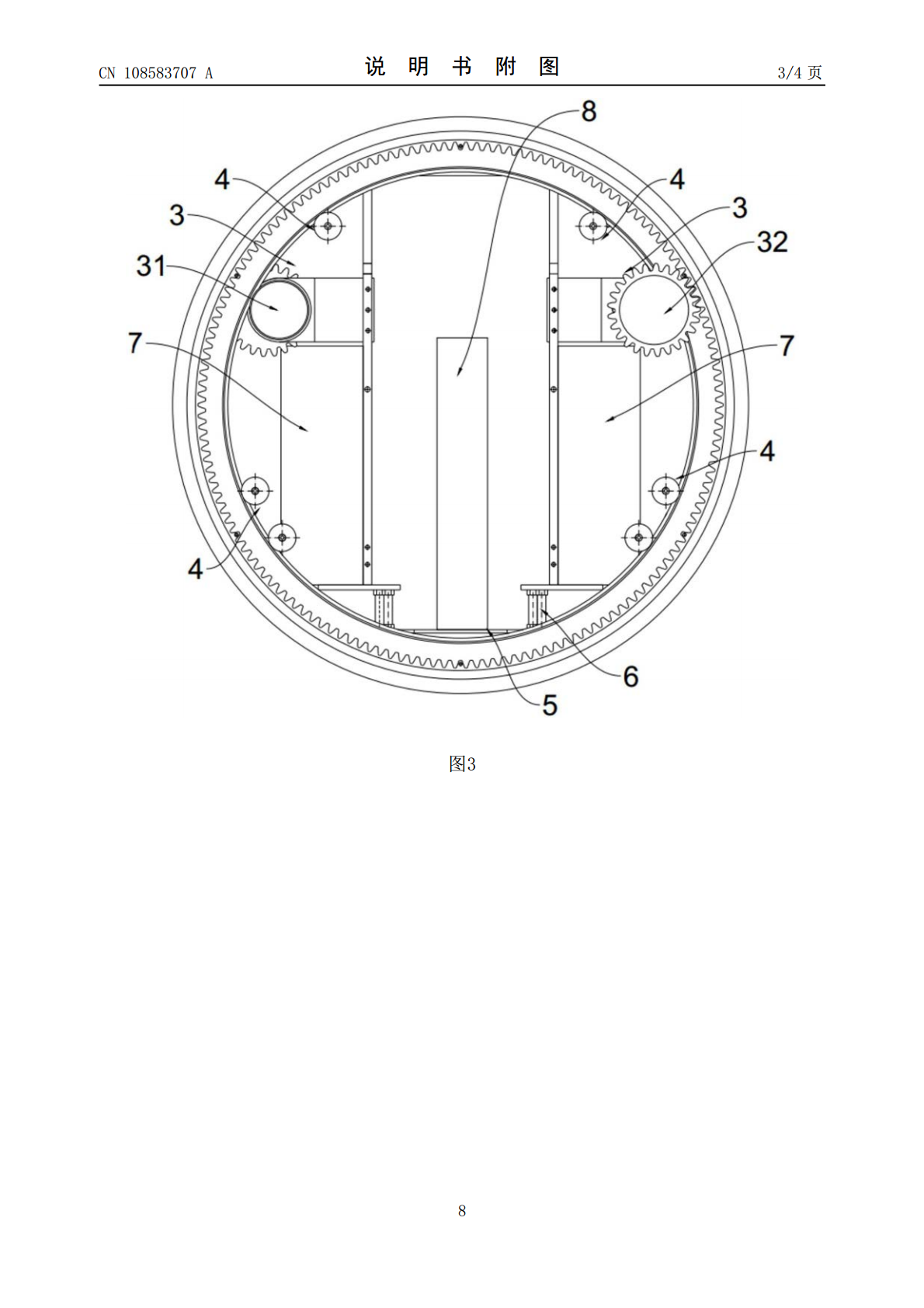
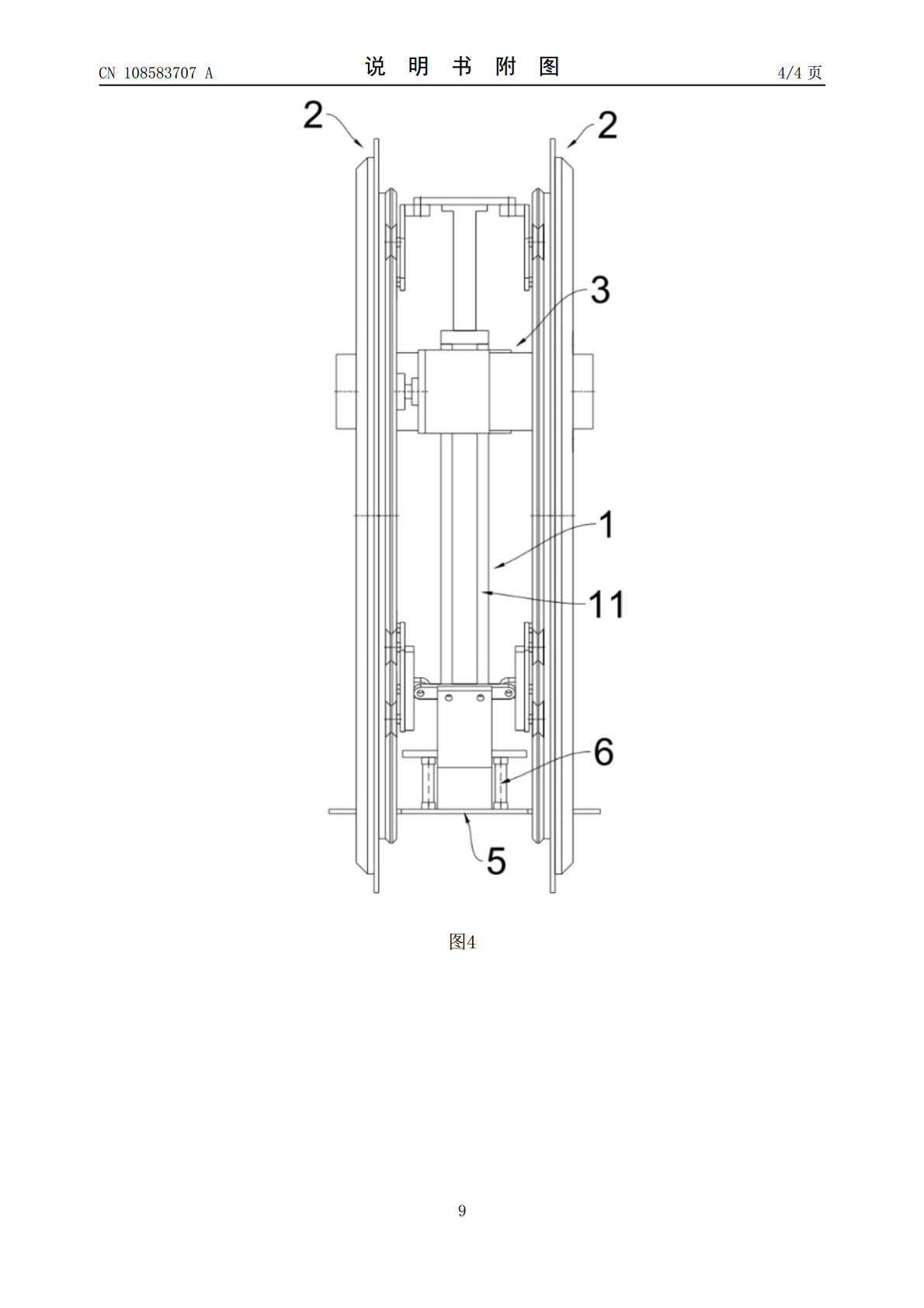
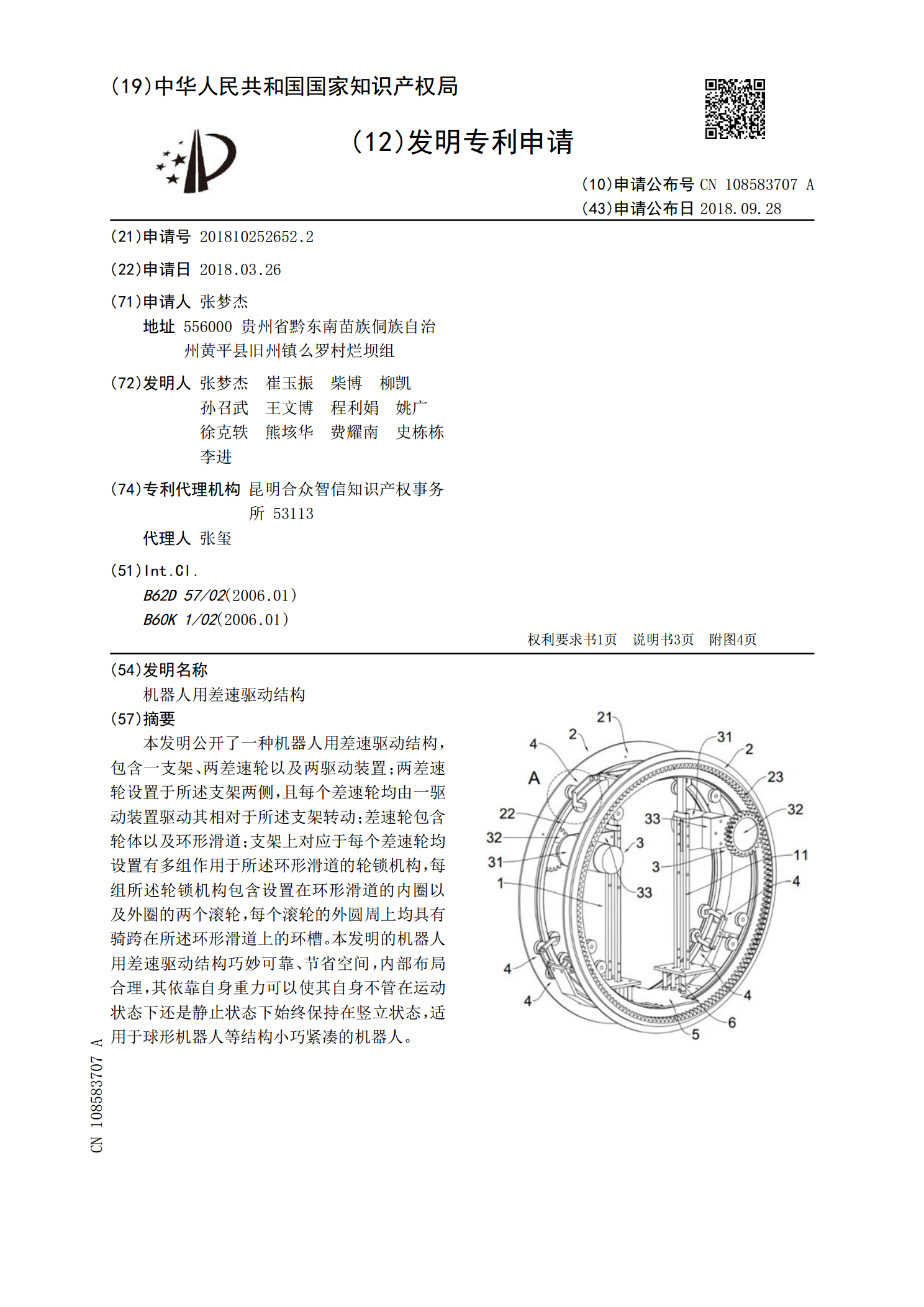
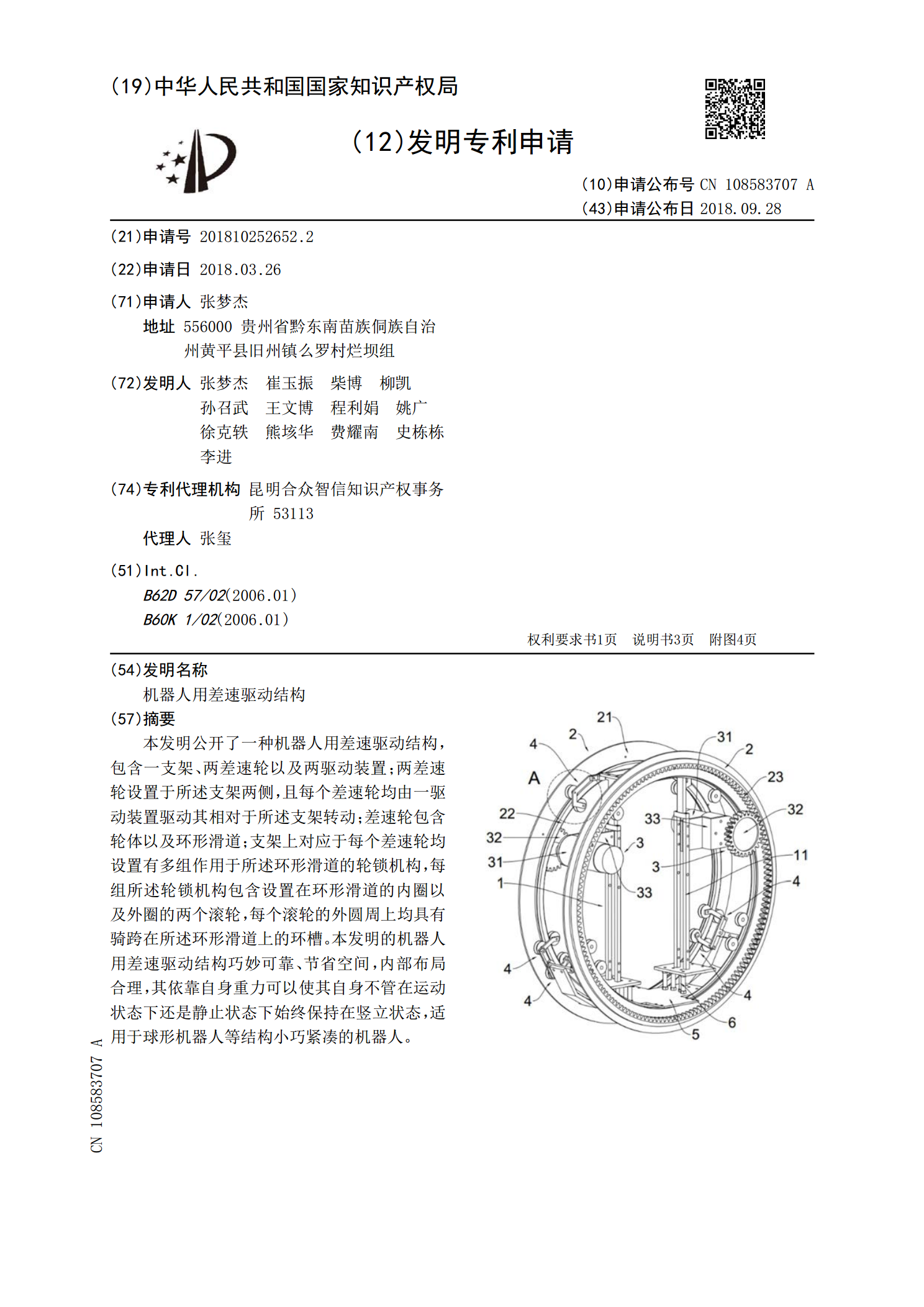
本发明公开了一种机器人用差速驱动结构,包含一支架、两差速轮以及两驱动装置;两差速轮设置于所述支架两侧,且每个差速轮均由一驱动装置驱动其相对于所述支架转动;差速轮包含轮体以及环形滑道;支架上对应于每个差速轮均设置有多组作用于所述环形滑道的轮锁机构,每组所述轮锁机构包含设置在环形滑道的内圈以及外圈的两个滚轮,每个滚轮的外圆周上均具有骑跨在所述环形滑道上的环槽。本发明的机器人用差速驱动结构巧妙可靠、节省空间,内部布局合理,其依靠自身重力可以使其自身不管在运动状态下还是静止状态下始终保持在竖立状态,适用于球形机器
机器人用差速驱动结构.pdf
本实用新型公开了一种机器人用差速驱动结构,包含一支架、两差速轮以及两驱动装置;两差速轮设置于所述支架两侧,且每个差速轮均由一驱动装置驱动其相对于所述支架转动;差速轮包含轮体以及环形滑道;支架上对应于每个差速轮均设置有多组作用于所述环形滑道的轮锁机构,每组所述轮锁机构包含设置在环形滑道的内圈以及外圈的两个滚轮,每个滚轮的外圆周上均具有骑跨在所述环形滑道上的环槽。本实用新型的机器人用差速驱动结构巧妙可靠、节省空间,内部布局合理,其依靠自身重力可以使其自身不管在运动状态下还是静止状态下始终保持在竖立状态,适用于
差速结构的转向驱动桥.pdf
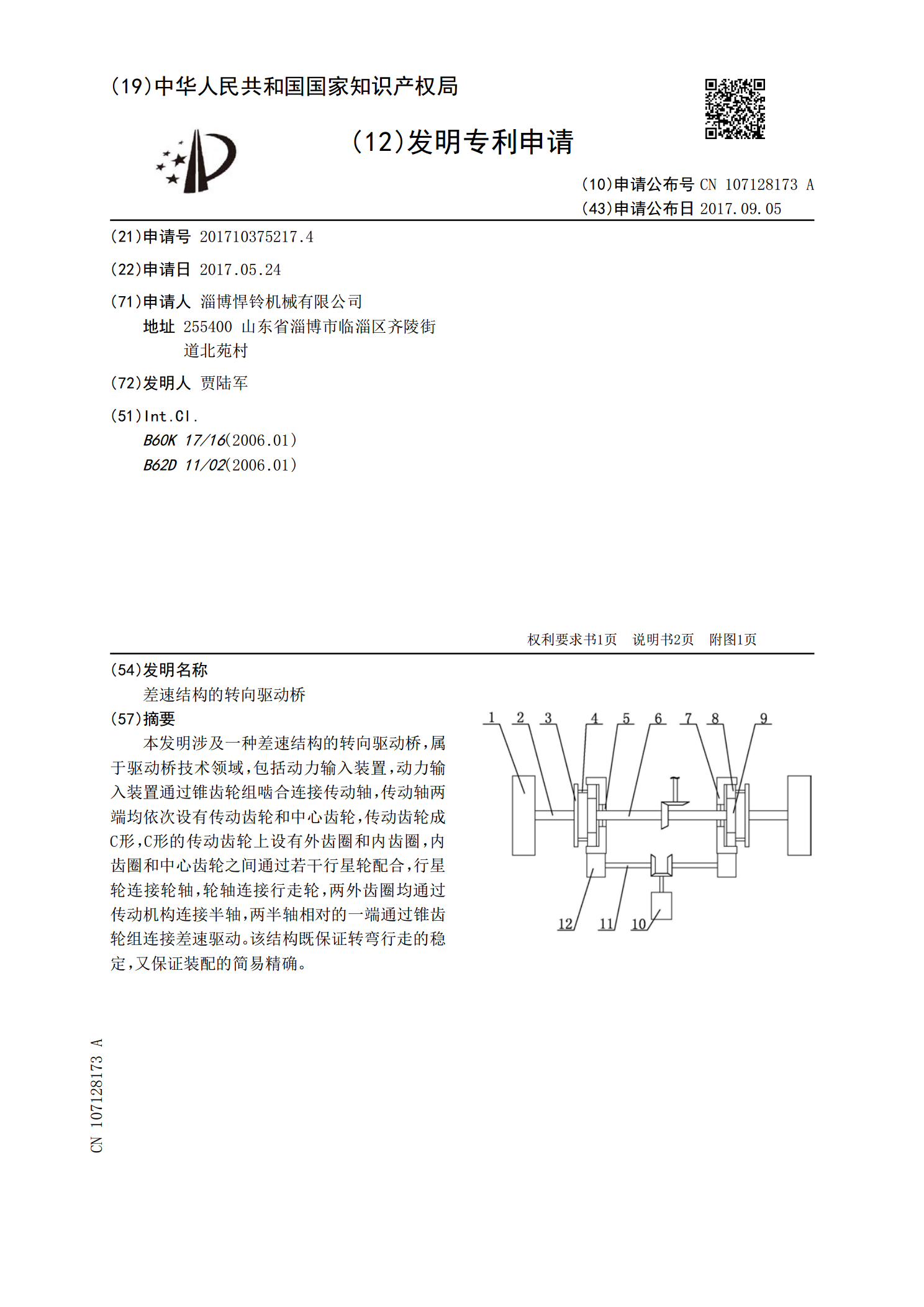
本发明涉及一种差速结构的转向驱动桥,属于驱动桥技术领域,包括动力输入装置,动力输入装置通过锥齿轮组啮合连接传动轴,传动轴两端均依次设有传动齿轮和中心齿轮,传动齿轮成C形,C形的传动齿轮上设有外齿圈和内齿圈,内齿圈和中心齿轮之间通过若干行星轮配合,行星轮连接轮轴,轮轴连接行走轮,两外齿圈均通过传动机构连接半轴,两半轴相对的一端通过锥齿轮组连接差速驱动。该结构既保证转弯行走的稳定,又保证装配的简易精确。
电动车差速驱动机构改进结构.pdf
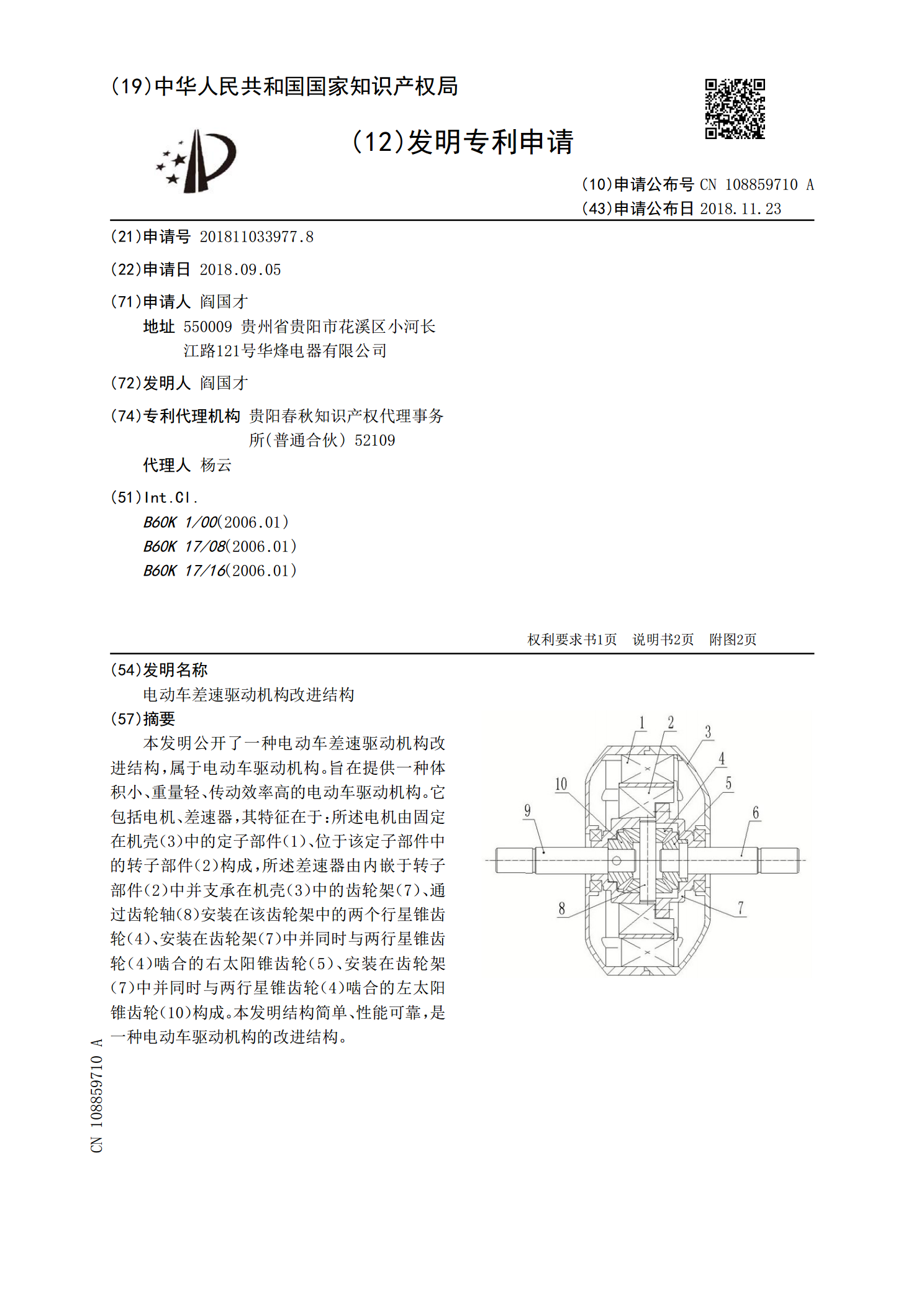
本发明公开了一种电动车差速驱动机构改进结构,属于电动车驱动机构。旨在提供一种体积小、重量轻、传动效率高的电动车驱动机构。它包括电机、差速器,其特征在于:所述电机由固定在机壳(3)中的定子部件(1)、位于该定子部件中的转子部件(2)构成,所述差速器由内嵌于转子部件(2)中并支承在机壳(3)中的齿轮架(7)、通过齿轮轴(8)安装在该齿轮架中的两个行星锥齿轮(4)、安装在齿轮架(7)中并同时与两行星锥齿轮(4)啮合的右太阳锥齿轮(5)、安装在齿轮架(7)中并同时与两行星锥齿轮(4)啮合的左太阳锥齿轮(10)构成
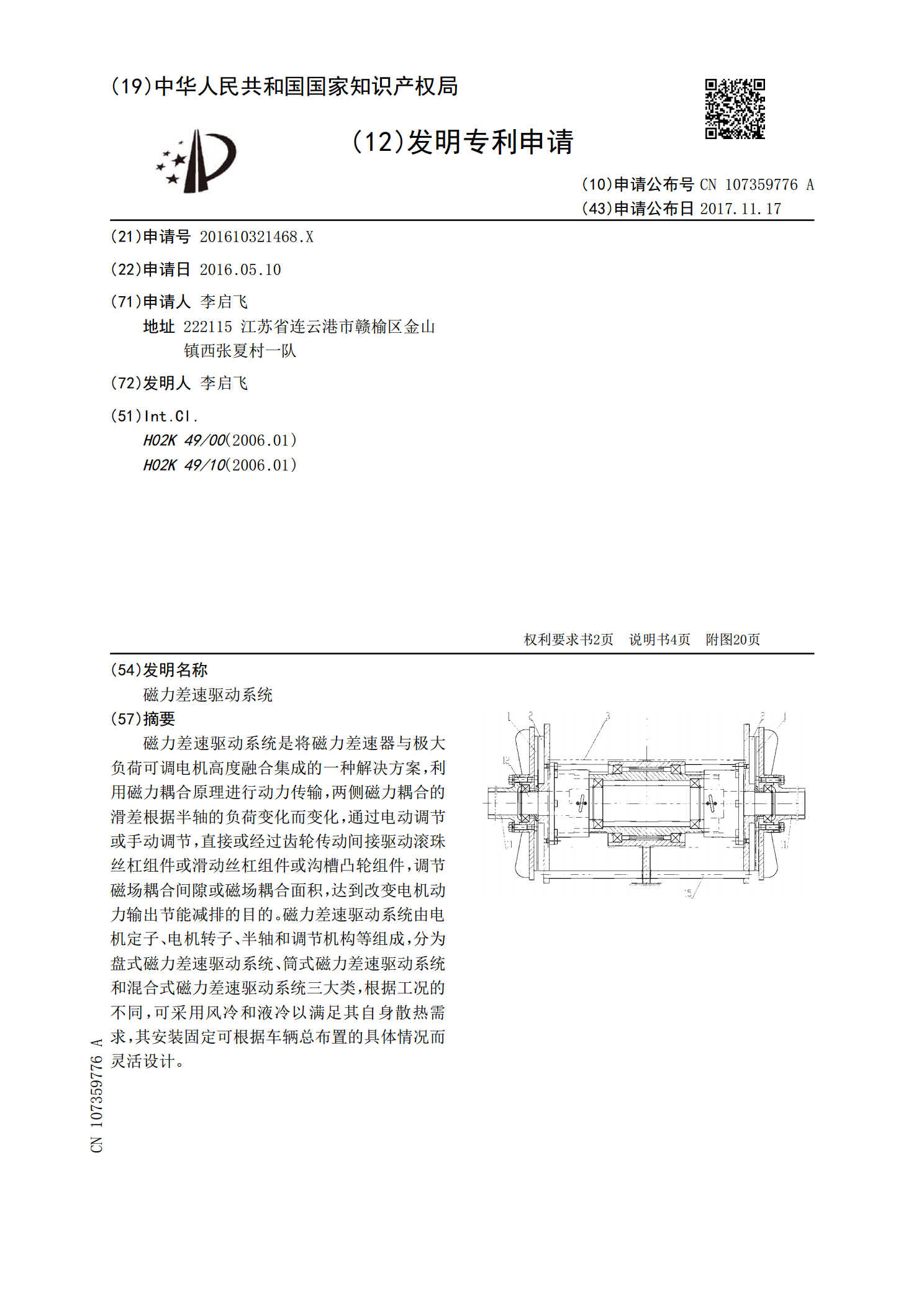
磁力差速驱动系统.pdf
磁力差速驱动系统是将磁力差速器与极大负荷可调电机高度融合集成的一种解决方案,利用磁力耦合原理进行动力传输,两侧磁力耦合的滑差根据半轴的负荷变化而变化,通过电动调节或手动调节,直接或经过齿轮传动间接驱动滚珠丝杠组件或滑动丝杠组件或沟槽凸轮组件,调节磁场耦合间隙或磁场耦合面积,达到改变电机动力输出节能减排的目的。磁力差速驱动系统由电机定子、电机转子、半轴和调节机构等组成,分为盘式磁力差速驱动系统、筒式磁力差速驱动系统和混合式磁力差速驱动系统三大类,根据工况的不同,可采用风冷和液冷以满足其自身散热需求,其安装固