
机器人套筒式提升机构.pdf

听云****君哇


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人套筒式提升机构.pdf
本发明属于搬运设备技术领域,为一种用于自动生产线上的直角坐标机器人Z轴套筒式大行程提升机构。该机构中的Z轴提升系统支座通过螺钉固定在X轴滑车支座的上表面上,并通过直线导轨副与X轴支架连接,随X轴系统行走;Z轴升降套筒通过螺钉与Z轴支座下端面相连,并可上下滑动,下端面通过螺钉连接机器人夹持机构;Z轴升降双速电机通过螺钉固定在Z轴支座的上端面,并通过钢丝绳与升降套筒的滑轮连接,驱动Z轴系统升降;Z轴升降套筒节节相扣,通过其内部的导向钢条导向;Z轴升降套筒的每节套筒伸出量由其内部的限位块位置决定。本发明的优点:

套筒式传动机构.pdf
本发明涉及一种套筒式传动机构,其特征在于:包括传动底座、链轮座周面支撑轮、链轮座端面扶正轮、链轮座和传动链轮,所述传动底座两侧分别安装一件链轮座周面支撑轮,所述链轮座放置在两件链轮座周面支撑轮上并可自由转动,链轮座为空心结构;在对应链轮座两端的位置处分别安装有一件链轮座端面扶正轮,所述链轮座端面扶正轮的轮面抵靠支撑在链轮座的两端面上;所述传动链轮为空心结构,传动链轮与链轮座同轴设置并固定连接,所述传动链轮用于接受动力输入,所述链轮座用于固定在管道上。本发明结构简单、紧凑、合理,能够实现稳定传动,工作可靠性
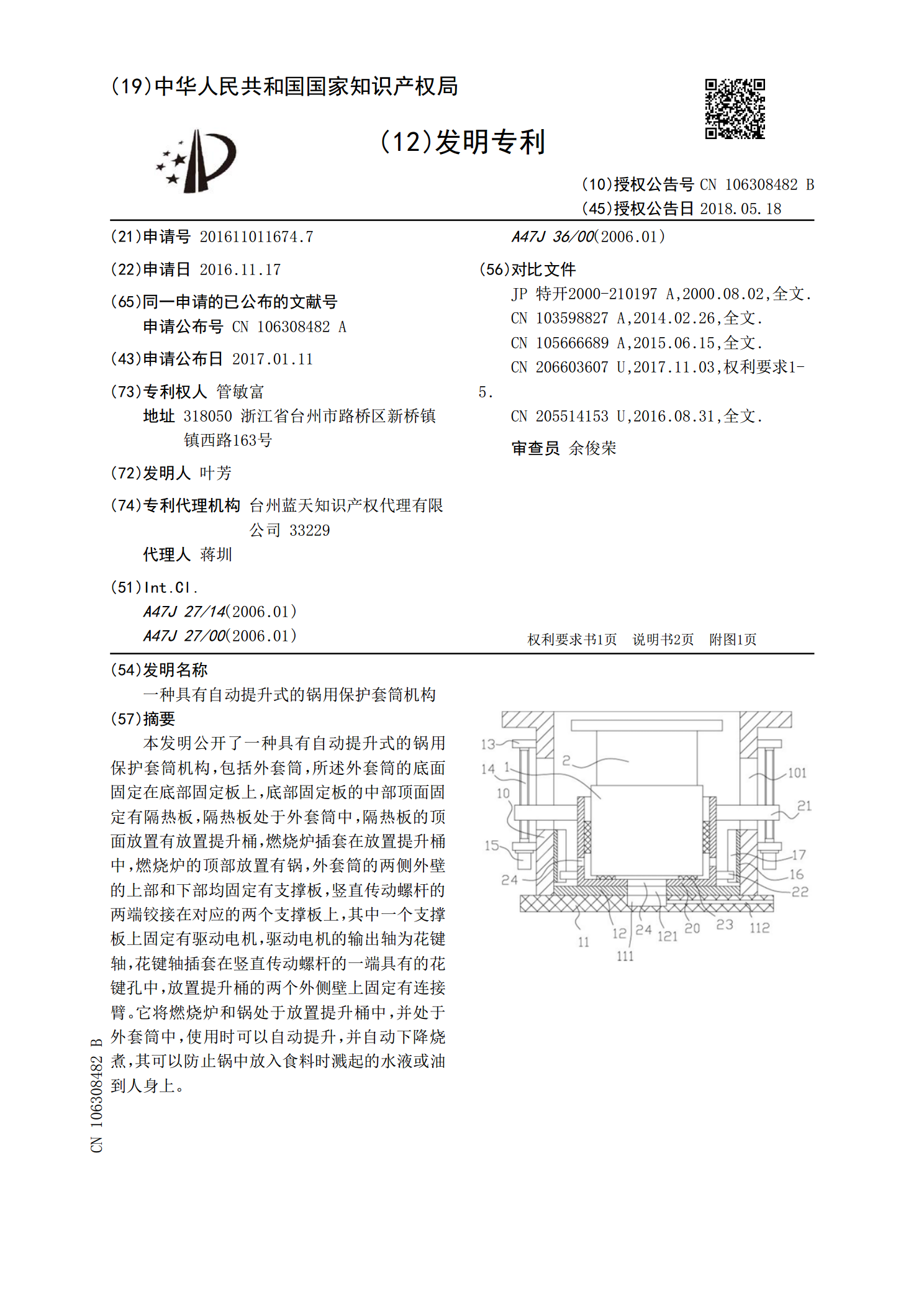
一种具有自动提升式的锅用保护套筒机构.pdf
本发明公开了一种具有自动提升式的锅用保护套筒机构,包括外套筒,所述外套筒的底面固定在底部固定板上,底部固定板的中部顶面固定有隔热板,隔热板处于外套筒中,隔热板的顶面放置有放置提升桶,燃烧炉插套在放置提升桶中,燃烧炉的顶部放置有锅,外套筒的两侧外壁的上部和下部均固定有支撑板,竖直传动螺杆的两端铰接在对应的两个支撑板上,其中一个支撑板上固定有驱动电机,驱动电机的输出轴为花键轴,花键轴插套在竖直传动螺杆的一端具有的花键孔中,放置提升桶的两个外侧壁上固定有连接臂。它将燃烧炉和锅处于放置提升桶中,并处于外套筒中,使

套筒式加压机构电机控制部分研究.docx
套筒式加压机构电机控制部分研究标题:套筒式加压机构电机控制部分研究摘要:本文主要研究套筒式加压机构的电机控制部分。首先介绍了套筒式加压机构的基本原理和工作机制,然后重点探讨了电机在加压机构中的控制策略和方法。通过分析和比较不同的电机控制技术,论文提出了一种有效的电机控制方案,并进行了仿真实验验证其性能。研究结果表明,该电机控制方法可以实现套筒式加压机构的精确控制和优化效能。关键词:套筒式加压机构,电机控制,控制策略,控制方法,仿真实验1.引言套筒式加压机构是一种常用的工业设备,广泛用于精密加工、液压系统和

一种钢带传动多级套筒式展收机构.pdf
本发明提出一种钢带传动多级套筒式展收机构,该展收机构包括内驱动式和外驱动式,所述外驱动展收机构的卷带轮、驱动轮和多级套筒模块通过刚带进行同步传动,支撑轮在驱动轮的下方,多级套筒模块由n个空心套筒相互嵌套而成,其中n≥2,钢带在多级套筒模块的外部。所述内驱展收机构的钢带在多级套筒模块的内部,且不设置支撑轮。解决了现有展收机构,存在拓展有限、机构收回时所占空间大、轮廓大、质量大、结构复杂、工艺空间利用有限的问题。本发明可根据实际需求设计适合的长度、横截面形状及驱动方式,具有展收比大、拓展方便、机构收回时所占空