
自适应式多真空室吸盘的研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自适应式多真空室吸盘的研究.docx
自适应式多真空室吸盘的研究标题:自适应式多真空室吸盘的研究摘要:本文介绍了自适应式多真空室吸盘的研究。首先,我们总结了传统的吸盘技术的局限性,然后提出了自适应式多真空室吸盘的原理和结构设计。接下来,我们介绍了吸盘的力学性能分析和仿真模拟。最后,我们通过实验验证了该吸盘在不同工况下的性能优势,包括吸附能力和自适应性。本研究为机器人领域和工业自动化提供了一种新型的高效、可靠的工具。关键词:吸盘、自适应、多真空室、力学性能、实验验证1.引言在现代工业生产中,吸盘被广泛应用于自动化装配、搬运和加工等领域。然而,传

一种多腔式真空吸盘.pdf
本发明公开了一种多腔式真空吸盘,盖板中心开设有配气腔,并且配气腔与气管接口连通;盖板底面开设有以盖板底面中心为原点,呈放射状分布且不相交的通气槽,并且通气槽与配气腔连通;盖板底面边沿设置有定位凸台;吸盘本体的顶面边沿开设有与定位凸台匹配的定位凹槽;吸盘本体顶面上开设有以吸盘本体顶面中心为原点,呈放射状分布的锥形通孔组,并且锥形通孔组与通气槽对应设置;吸盘本体底面上垂直设置有蜘蛛网式隔板组件,蜘蛛网式隔板组件在吸盘本体底面交错形成多个吸盘腔,吸盘腔分别与对应设置所述锥形通孔连通。本发明借鉴王莲叶片多气室的特

喷气真空吸盘式抓取器的试验研究.docx
喷气真空吸盘式抓取器的试验研究摘要:本文主要针对喷气真空吸盘式抓取器进行了试验研究。通过设计实验方案,制作实验样品,对抓取器的抓取力和稳定性进行了测试。实验结果表明,该抓取器具有较高的抓取力和稳定性,适用于各种工业领域的物体抓取任务。同时,本文还对抓取器的优化方向进行了讨论,为进一步提高抓取器的性能提供了参考。关键词:喷气真空吸盘;抓取力;稳定性;试验研究引言随着现代工业生产的发展,物体的抓取和搬运成为了生产线上重要的工作环节。而抓取器作为自动化生产线上常用的装置之一,其抓取力和稳定性对于完成高效的物体抓
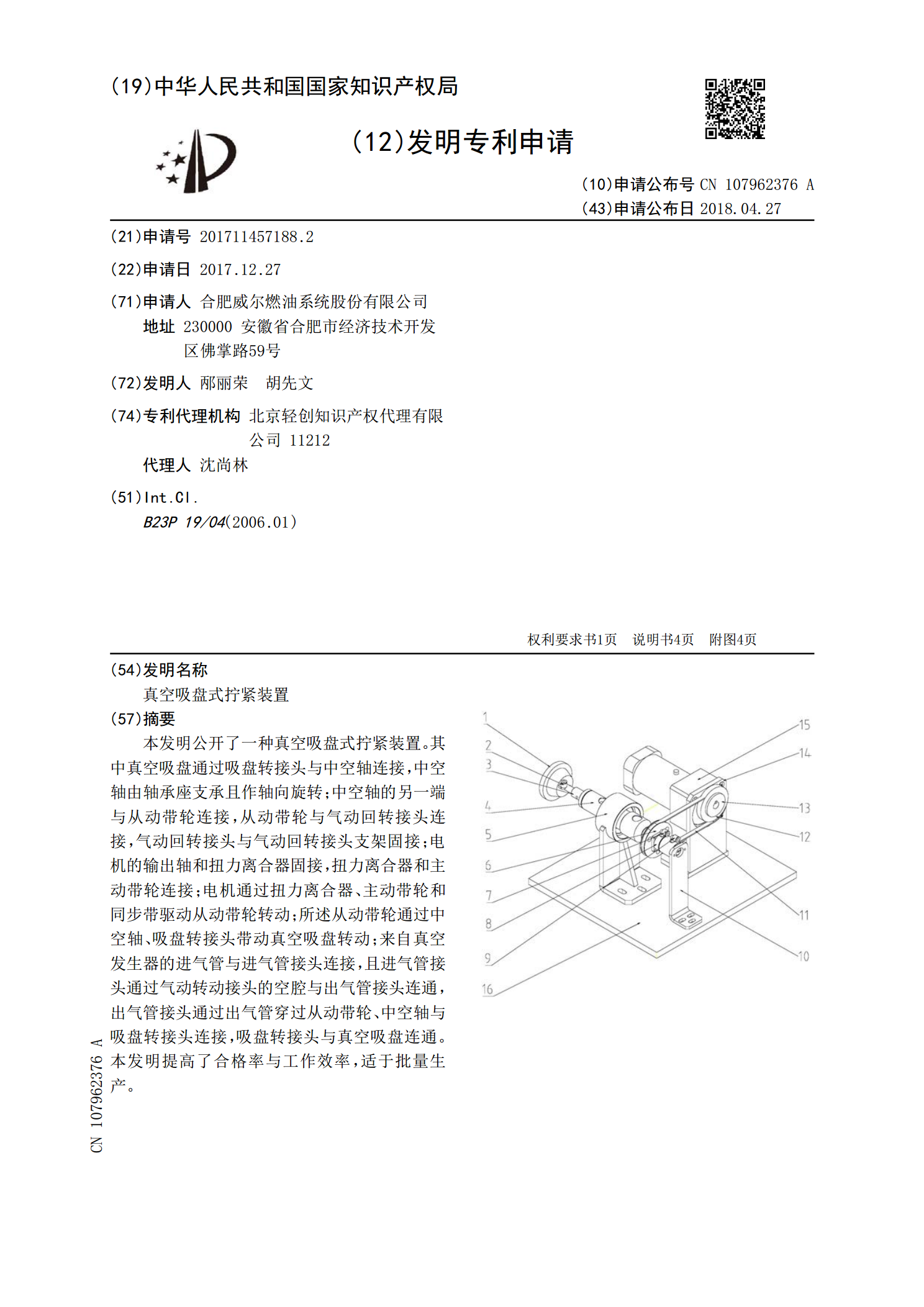
真空吸盘式拧紧装置.pdf
本发明公开了一种真空吸盘式拧紧装置。其中真空吸盘通过吸盘转接头与中空轴连接,中空轴由轴承座支承且作轴向旋转;中空轴的另一端与从动带轮连接,从动带轮与气动回转接头连接,气动回转接头与气动回转接头支架固接;电机的输出轴和扭力离合器固接,扭力离合器和主动带轮连接;电机通过扭力离合器、主动带轮和同步带驱动从动带轮转动;所述从动带轮通过中空轴、吸盘转接头带动真空吸盘转动;来自真空发生器的进气管与进气管接头连接,且进气管接头通过气动转动接头的空腔与出气管接头连通,出气管接头通过出气管穿过从动带轮、中空轴与吸盘转接头连
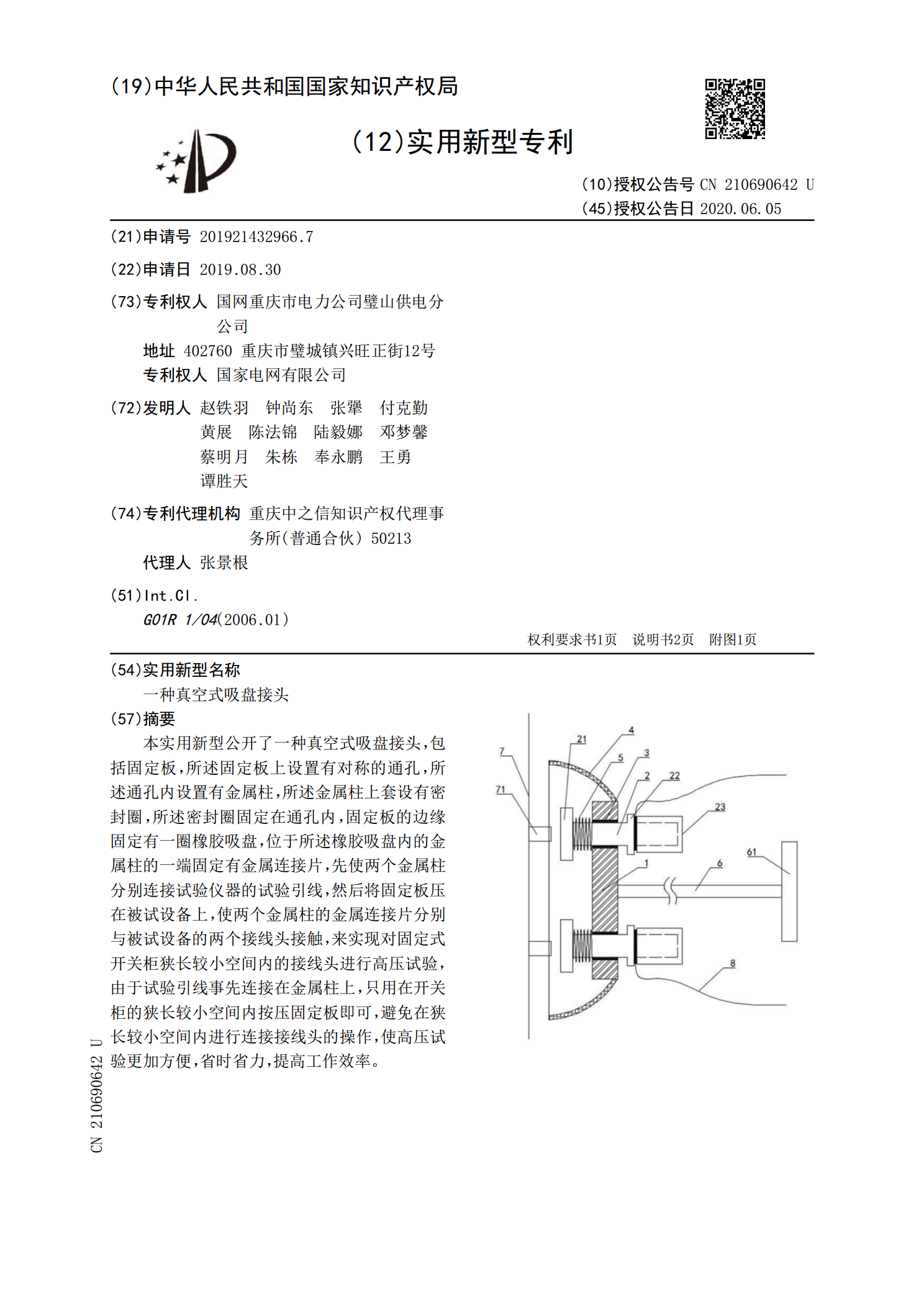
一种真空式吸盘接头.pdf
本实用新型公开了一种真空式吸盘接头,包括固定板,所述固定板上设置有对称的通孔,所述通孔内设置有金属柱,所述金属柱上套设有密封圈,所述密封圈固定在通孔内,固定板的边缘固定有一圈橡胶吸盘,位于所述橡胶吸盘内的金属柱的一端固定有金属连接片,先使两个金属柱分别连接试验仪器的试验引线,然后将固定板压在被试设备上,使两个金属柱的金属连接片分别与被试设备的两个接线头接触,来实现对固定式开关柜狭长较小空间内的接线头进行高压试验,由于试验引线事先连接在金属柱上,只用在开关柜的狭长较小空间内按压固定板即可,避免在狭长较小空间