
多轴车辆油气悬架调平装置及方法.pdf

猫巷****永安


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多轴车辆油气悬架调平装置及方法.pdf
本发明涉及一种用于轮式车辆上的多轴车辆油气悬架调平装置及方法,该装置包括油箱、油泵、公用储能器、车轮、油气弹簧组件,它是通过油气弹簧耦连的方式将两轴或多轴车辆的悬架转化为三点支撑,实现基于三点控制的车载平台调平方式;它还包括一个控制面板、一个微处理器,至少三个连接在油液管路上并与微处理器电连接的充放油控制阀,一个连接在油液管路上并与微处理器电连接的耦连阀,设置在每个悬架上横臂与车身之间的高度传感器,一个固定于车身上的倾角传感器,所述的高度传感器与倾角传感器通过信号线与微处理器电连接,所述的微处理器由解算器
多轴重型车辆的油气悬架系统及其优化设计方法.pdf
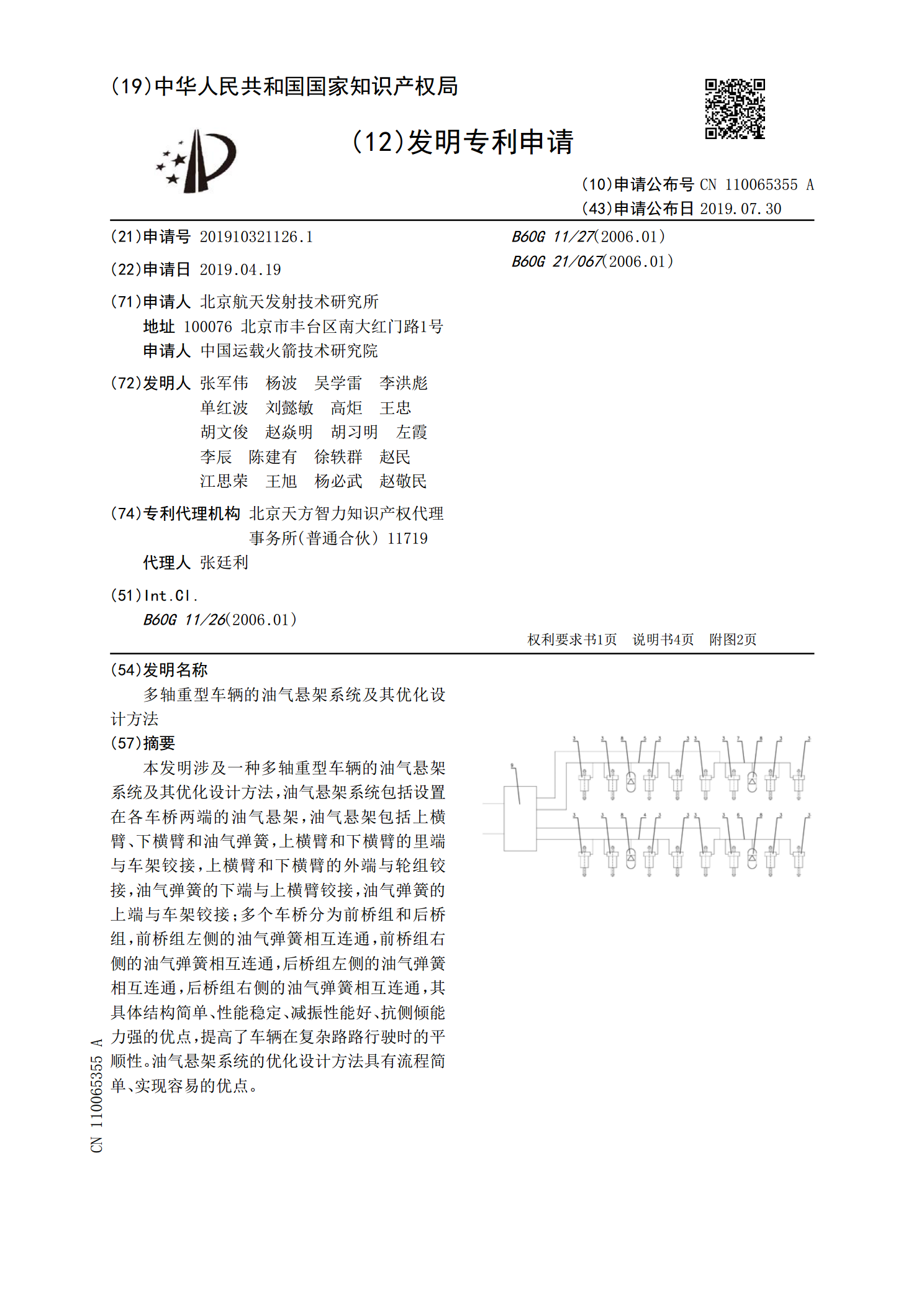
本发明涉及一种多轴重型车辆的油气悬架系统及其优化设计方法,油气悬架系统包括设置在各车桥两端的油气悬架,油气悬架包括上横臂、下横臂和油气弹簧,上横臂和下横臂的里端与车架铰接,上横臂和下横臂的外端与轮组铰接,油气弹簧的下端与上横臂铰接,油气弹簧的上端与车架铰接;多个车桥分为前桥组和后桥组,前桥组左侧的油气弹簧相互连通,前桥组右侧的油气弹簧相互连通,后桥组左侧的油气弹簧相互连通,后桥组右侧的油气弹簧相互连通,其具体结构简单、性能稳定、减振性能好、抗侧倾能力强的优点,提高了车辆在复杂路路行驶时的平顺性。油气悬架系
空气悬架的调平方法、装置与空气悬架系统.pdf
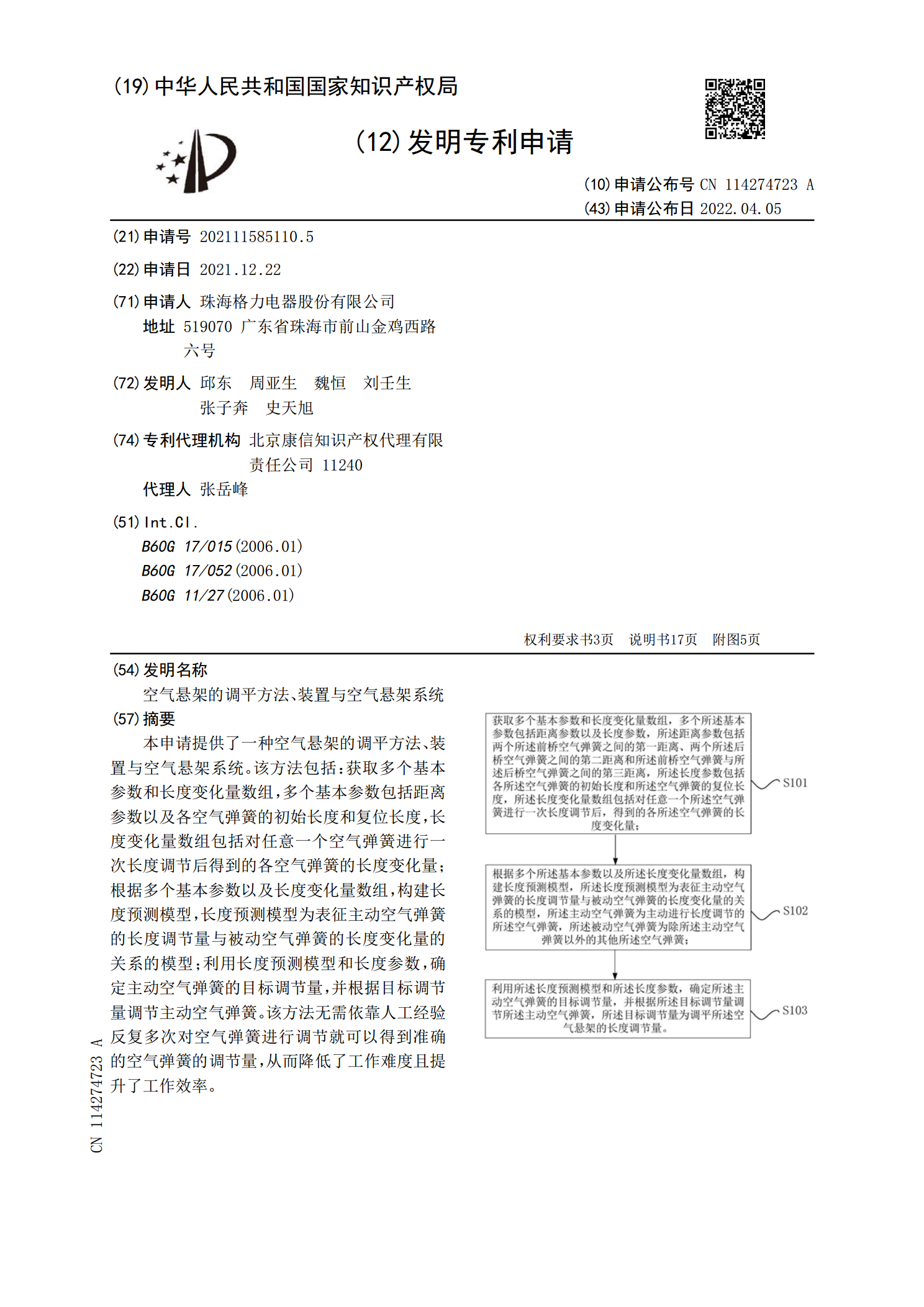
本申请提供了一种空气悬架的调平方法、装置与空气悬架系统。该方法包括:获取多个基本参数和长度变化量数组,多个基本参数包括距离参数以及各空气弹簧的初始长度和复位长度,长度变化量数组包括对任意一个空气弹簧进行一次长度调节后得到的各空气弹簧的长度变化量;根据多个基本参数以及长度变化量数组,构建长度预测模型,长度预测模型为表征主动空气弹簧的长度调节量与被动空气弹簧的长度变化量的关系的模型;利用长度预测模型和长度参数,确定主动空气弹簧的目标调节量,并根据目标调节量调节主动空气弹簧。该方法无需依靠人工经验反复多次对空气
多轴重型车辆的独立悬架调高系统及调高方法.pdf
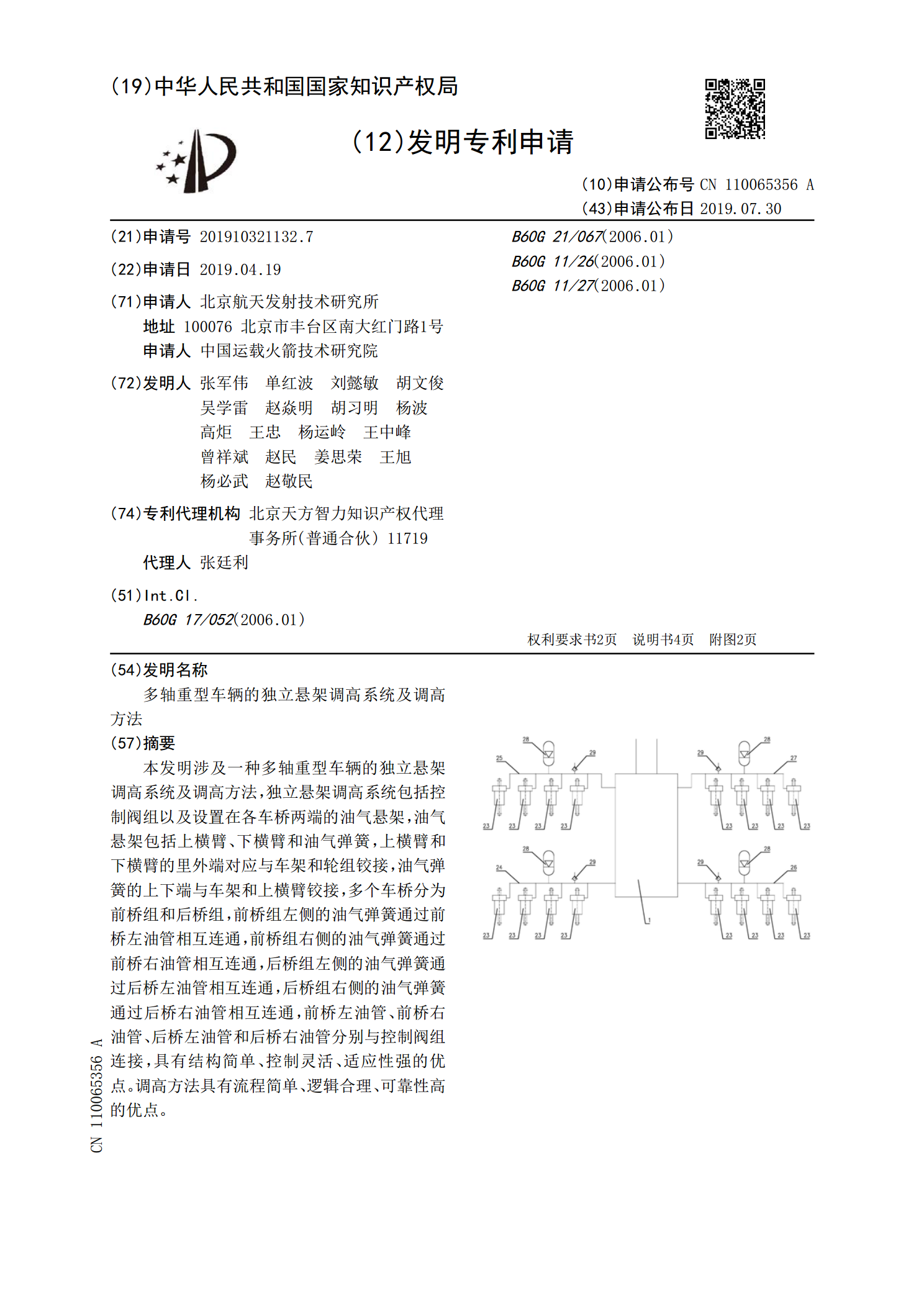
本发明涉及一种多轴重型车辆的独立悬架调高系统及调高方法,独立悬架调高系统包括控制阀组以及设置在各车桥两端的油气悬架,油气悬架包括上横臂、下横臂和油气弹簧,上横臂和下横臂的里外端对应与车架和轮组铰接,油气弹簧的上下端与车架和上横臂铰接,多个车桥分为前桥组和后桥组,前桥组左侧的油气弹簧通过前桥左油管相互连通,前桥组右侧的油气弹簧通过前桥右油管相互连通,后桥组左侧的油气弹簧通过后桥左油管相互连通,后桥组右侧的油气弹簧通过后桥右油管相互连通,前桥左油管、前桥右油管、后桥左油管和后桥右油管分别与控制阀组连接,具有结

多轴车辆的质心测量装置及测量方法.pdf
多轴车辆的质心测量装置及测量方法。测量车辆质心位置,最常用的方法有重量反应法和平台反力支承法。一种多轴车辆的质心测量装置,其组成包括:测量平台(1)、基座(2),所述的测量平台上面嵌入轮荷称重板(3),所述的测量平台上表面一侧连接侧向限位装置(4),所述的基座具有基座高端(5)和基座低端(6),所述的基座高端通过固定铰(7)连接所述的测量平台下表面一侧,所述的基座低端通过液压驱动缸(8)连接所述的测量平台下表面另一侧。发明用于测量多轴车辆。