
一种负重弹跳机器人液压动力装置.pdf

哲妍****彩妍


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种负重弹跳机器人液压动力装置.pdf
本发明涉及一种负重弹跳机器人液压动力装置,采用液压集成块形式;油路集成块上安装有电机、蓄能器、换向阀、溢流阀、油箱、导油块、齿轮泵及液压管路,其中导油块和齿轮泵固定在油箱内;液压元件的油口与相对应的油路集成块上的油口连接;液压管路的另一端与液压缸连接,电机通过联轴器与齿轮泵相连接。当电机动作时,齿轮泵通过导油块把油箱内的油注入油路集成块中相应的油路,蓄能器积蓄能量,通过换向阀控制液压管路中的流向,实现液压缸快速动作。该装置体积小、重量轻、功率/质量比大;液压动力装置易于控制,能将系统功率在极短时间内集中提
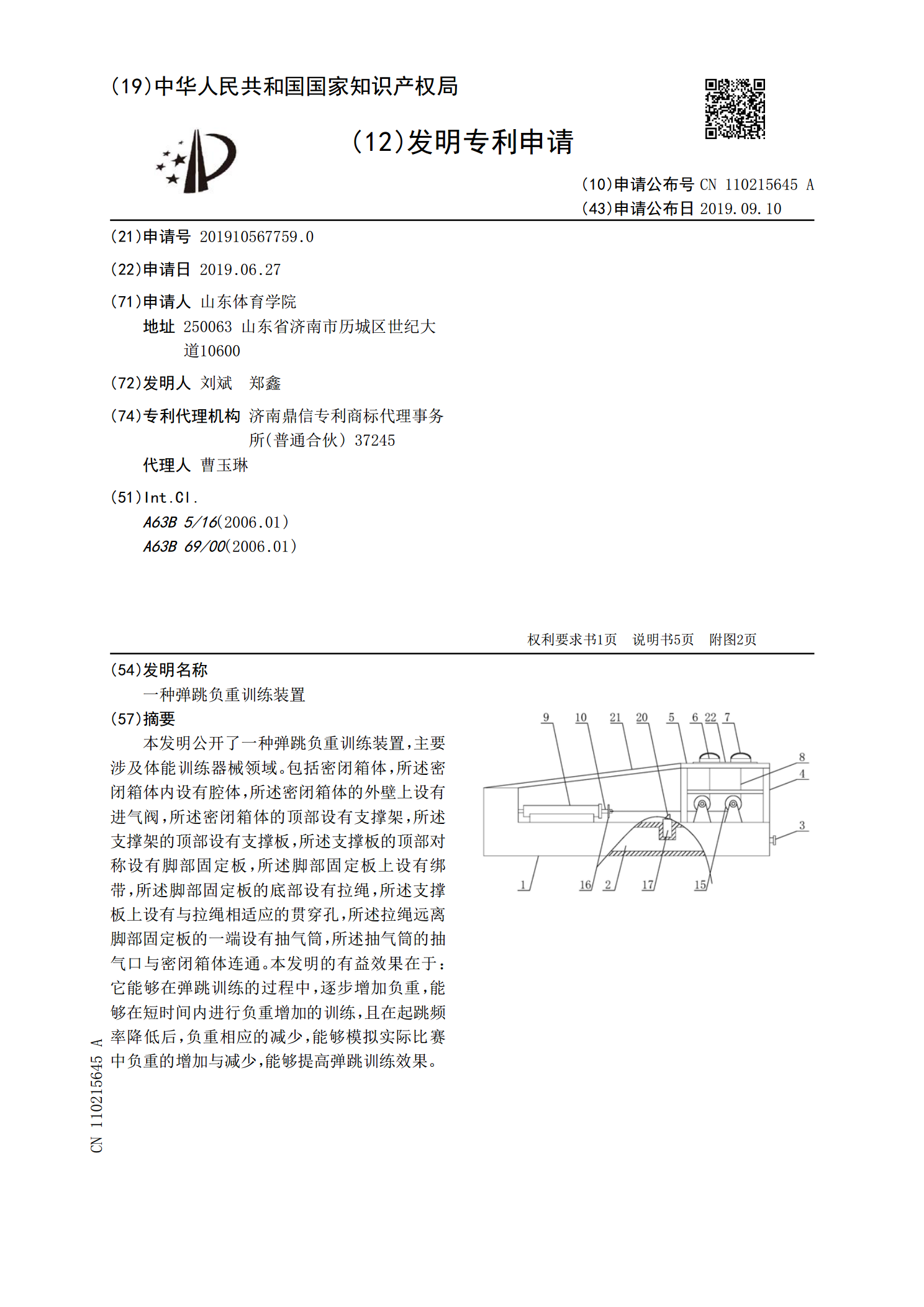
一种弹跳负重训练装置.pdf
本发明公开了一种弹跳负重训练装置,主要涉及体能训练器械领域。包括密闭箱体,所述密闭箱体内设有腔体,所述密闭箱体的外壁上设有进气阀,所述密闭箱体的顶部设有支撑架,所述支撑架的顶部设有支撑板,所述支撑板的顶部对称设有脚部固定板,所述脚部固定板上设有绑带,所述脚部固定板的底部设有拉绳,所述支撑板上设有与拉绳相适应的贯穿孔,所述拉绳远离脚部固定板的一端设有抽气筒,所述抽气筒的抽气口与密闭箱体连通。本发明的有益效果在于:它能够在弹跳训练的过程中,逐步增加负重,能够在短时间内进行负重增加的训练,且在起跳频率降低后,负
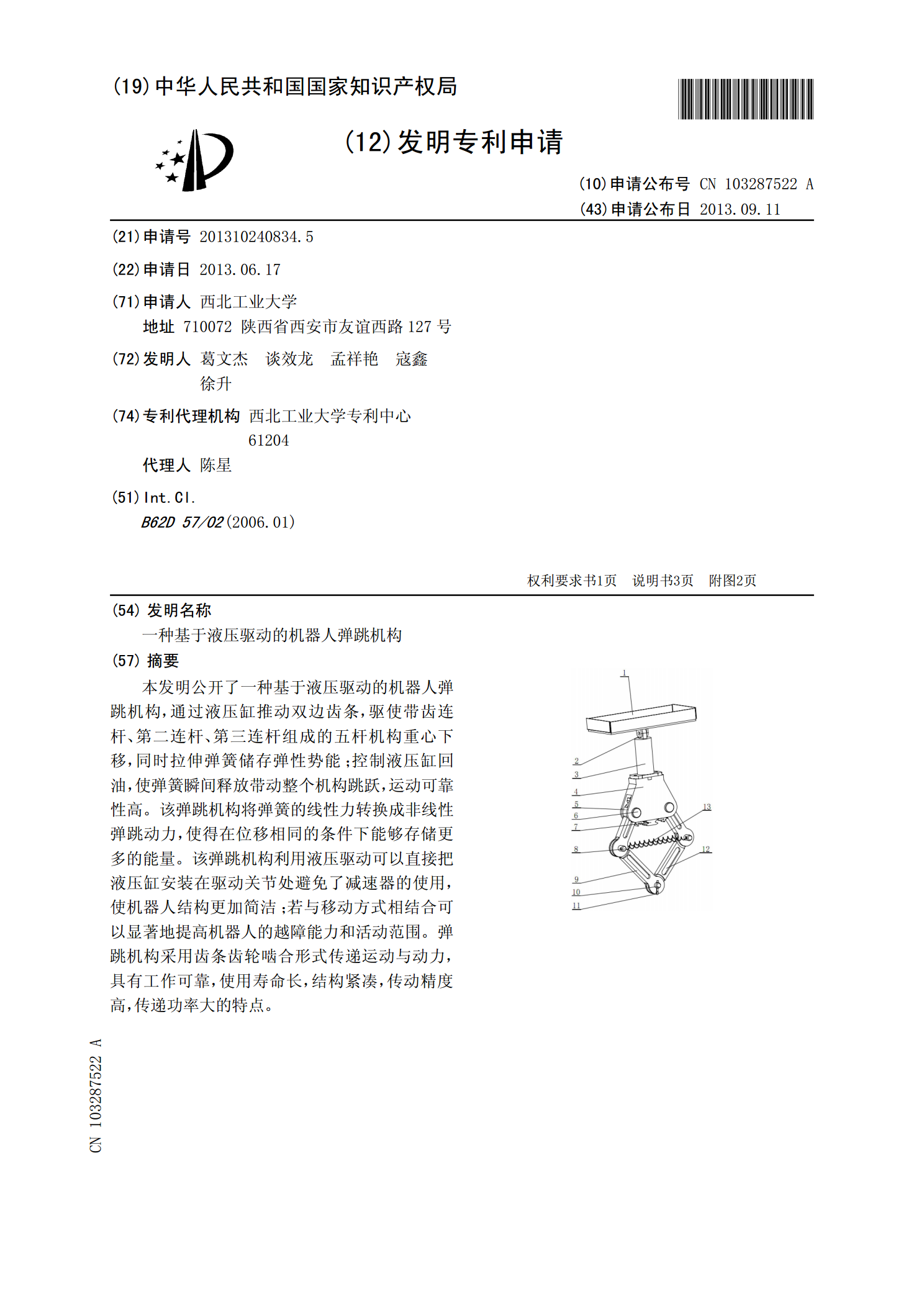
一种基于液压驱动的机器人弹跳机构.pdf
本发明公开了一种基于液压驱动的机器人弹跳机构,通过液压缸推动双边齿条,驱使带齿连杆、第二连杆、第三连杆组成的五杆机构重心下移,同时拉伸弹簧储存弹性势能;控制液压缸回油,使弹簧瞬间释放带动整个机构跳跃,运动可靠性高。该弹跳机构将弹簧的线性力转换成非线性弹跳动力,使得在位移相同的条件下能够存储更多的能量。该弹跳机构利用液压驱动可以直接把液压缸安装在驱动关节处避免了减速器的使用,使机器人结构更加简洁;若与移动方式相结合可以显著地提高机器人的越障能力和活动范围。弹跳机构采用齿条齿轮啮合形式传递运动与动力,具有工作

一种机器人弹跳装置及其弹跳方法.pdf
一种机器人弹跳装置及其弹跳方法,包括弹跳驱动机构、弹跳机构和机身,所述的弹跳驱动机构包括微型减速电机、电机架、减速齿轮组及传动轴组、固定架组、小齿轮、传动轴及钢丝绳;所述的弹跳机构包括上对称齿轮及固定件、下对称齿轮及固定件、弹跳上杆、弹跳下杆、拉簧和/或扭簧,以及弹跳底板。本发明采用改进的六杆式机构加装拉簧和扭簧,通过调节拉簧和扭簧的数量可实现多个级别的储能,解决了传统的六杆弹跳结构中六杆弹簧储能机构单纯依靠拉伸弹簧需要较大空间的问题,便于机器人的小型化,在相同的机构纵向运动位移量下其储能更高,并且具有较
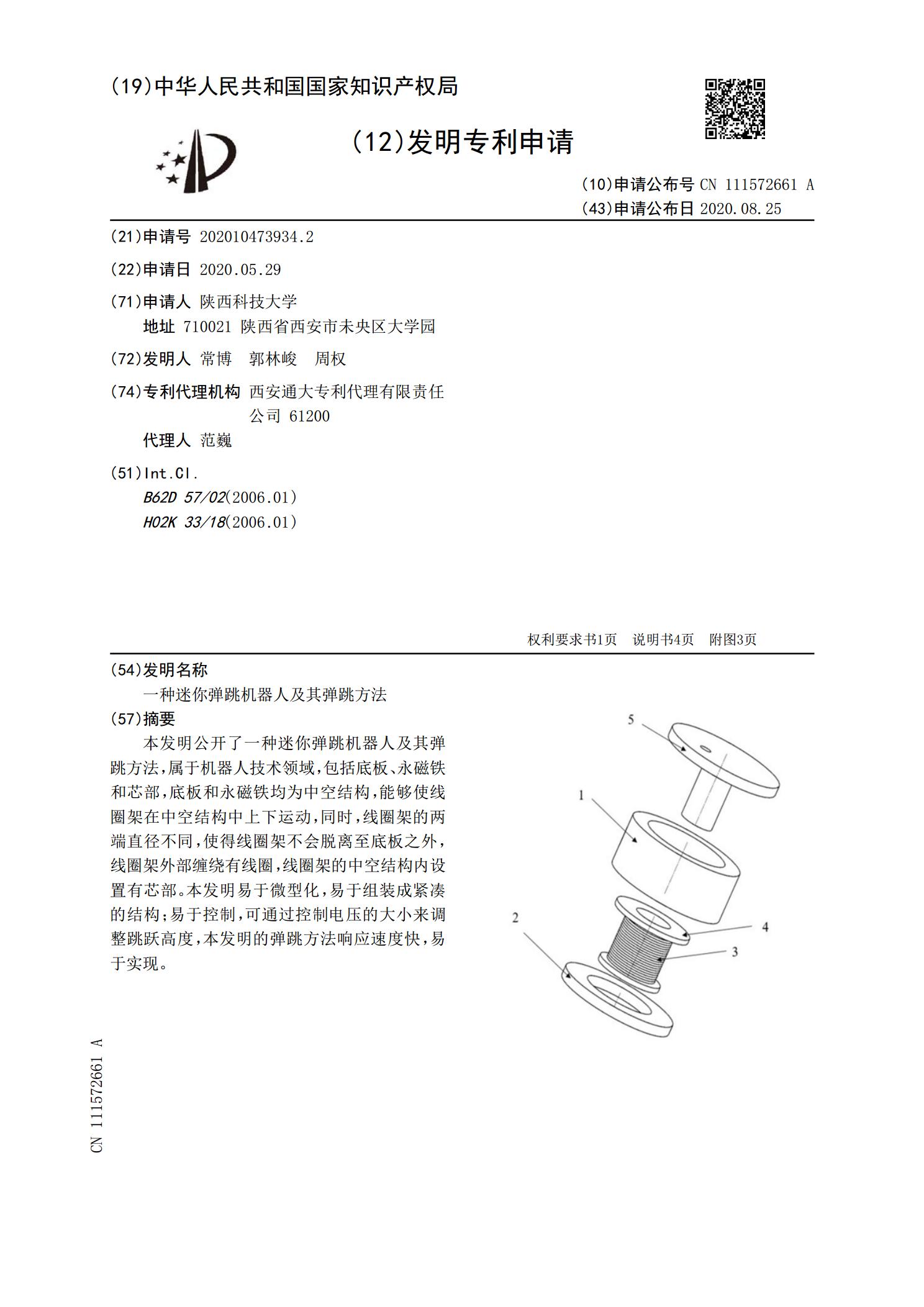
一种迷你弹跳机器人及其弹跳方法.pdf
本发明公开了一种迷你弹跳机器人及其弹跳方法,属于机器人技术领域,包括底板、永磁铁和芯部,底板和永磁铁均为中空结构,能够使线圈架在中空结构中上下运动,同时,线圈架的两端直径不同,使得线圈架不会脱离至底板之外,线圈架外部缠绕有线圈,线圈架的中空结构内设置有芯部。本发明易于微型化,易于组装成紧凑的结构;易于控制,可通过控制电压的大小来调整跳跃高度,本发明的弹跳方法响应速度快,易于实现。