
一种基于死区离散趋近律的准滑模控制.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于死区离散趋近律的准滑模控制.docx
一种基于死区离散趋近律的准滑模控制基于死区离散趋近律的准滑模控制摘要:准滑模控制(quasi-slidingmodecontrol)是一种在控制系统中广泛应用的控制策略,它具有较强的鲁棒性和自适应性能。然而,在实际应用中,由于系统存在参数不确定性和外部扰动等因素,传统的准滑模控制方法往往会引入较大的震荡,并且还可能导致控制性能的下降。为了解决这一问题,本论文提出了一种基于死区离散趋近律的准滑模控制方法,通过引入死区技术和离散趋近律设计,实现了系统的较好控制性能。关键词:准滑模控制、死区技术、离散趋近律、鲁

基于改进趋近律的机械手滑模控制.docx
基于改进趋近律的机械手滑模控制基于改进趋近律的机械手滑模控制摘要:滑模控制是一种非线性控制方法,具有鲁棒性强、鲁棒性兼有性能等优点。然而,滑模控制器在实际应用中存在着滑模面趋近速度慢、系统参数不精确等问题。针对这些问题,本文基于改进趋近律的机械手滑模控制方法,通过引入自适应控制策略和改进的滑模面设计,提高了滑模控制器的控制性能。通过仿真实验验证了该方法的有效性。关键词:滑模控制;机械手;趋近律;自适应控制;非线性控制1.引言滑模控制作为一种非线性控制方法,在工程应用中具有广泛的应用前景。然而,由于系统非线

基于不同趋近律的滑模控制仿真实验.docx
基于不同趋近律的滑模控制仿真实验滑模控制(SMC)是一种强鲁棒性控制方法,可以在面对参数不确定性、模型误差和外部干扰时保持系统稳定性。近年来,SMC已经成为各个领域的研究热点,如机器人、飞行器、化工系统等。SMC的核心思想是通过引入滑模面来实现系统的控制,使系统在滑模面上实现无限精度的跟踪控制。在SMC中,滑模面通常定义为一个平面,其法向量为系统误差的负方向,即控制目标与实际输出之间的误差,而切线方向是控制器输出。因此,当系统状态沿着滑模面移动时,控制器可以保持输出不变,从而达到控制目标。虽然SMC的应用
一种基于改进离散趋近律的DC-DC buck变换器滑模控制算法.pdf
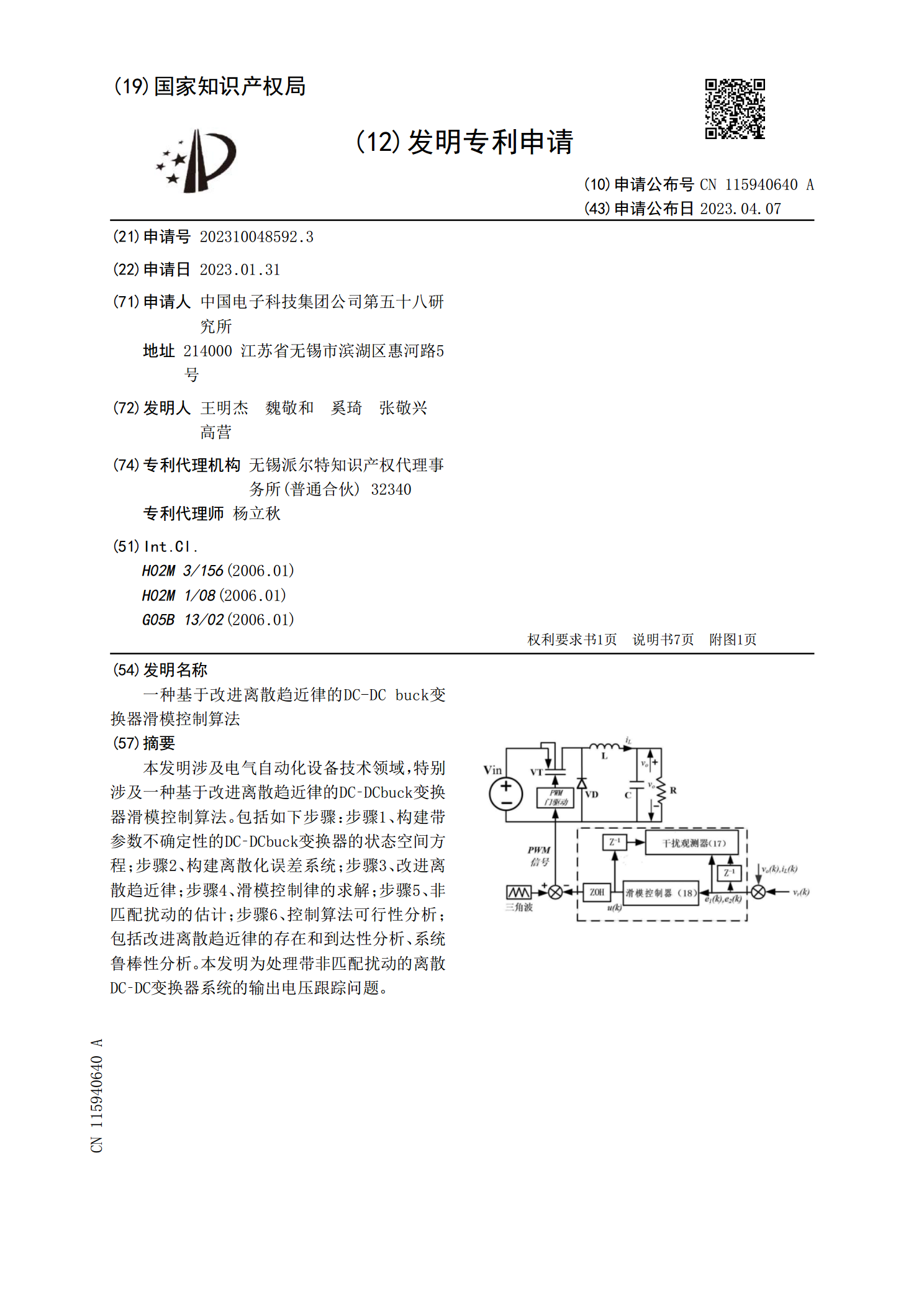
本发明涉及电气自动化设备技术领域,特别涉及一种基于改进离散趋近律的DC‑DCbuck变换器滑模控制算法。包括如下步骤:步骤1、构建带参数不确定性的DC‑DCbuck变换器的状态空间方程;步骤2、构建离散化误差系统;步骤3、改进离散趋近律;步骤4、滑模控制律的求解;步骤5、非匹配扰动的估计;步骤6、控制算法可行性分析;包括改进离散趋近律的存在和到达性分析、系统鲁棒性分析。本发明为处理带非匹配扰动的离散DC‑DC变换器系统的输出电压跟踪问题。
基于新型趋近律的板球系统自适应滑模控制.pptx
汇报人:CONTENTSPARTONEPARTTWO板球系统的基本原理自适应滑模控制的基本概念新型趋近律的引入PARTTHREE传统趋近律的局限性新型趋近律的设计思路新型趋近律的数学模型新型趋近律的仿真验证PARTFOUR滑模控制器的设计原则基于新型趋近律的滑模控制器设计滑模控制器的稳定性分析滑模控制器的参数优化PARTFIVE实验平台的搭建实验过程与结果分析结果与预期的对比分析控制器的性能评估PARTSIX研究成果总结未来研究方向汇报人: