
一种基于改进离散趋近律的DC-DC buck变换器滑模控制算法.pdf

努力****爱静


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于改进离散趋近律的DC-DC buck变换器滑模控制算法.pdf
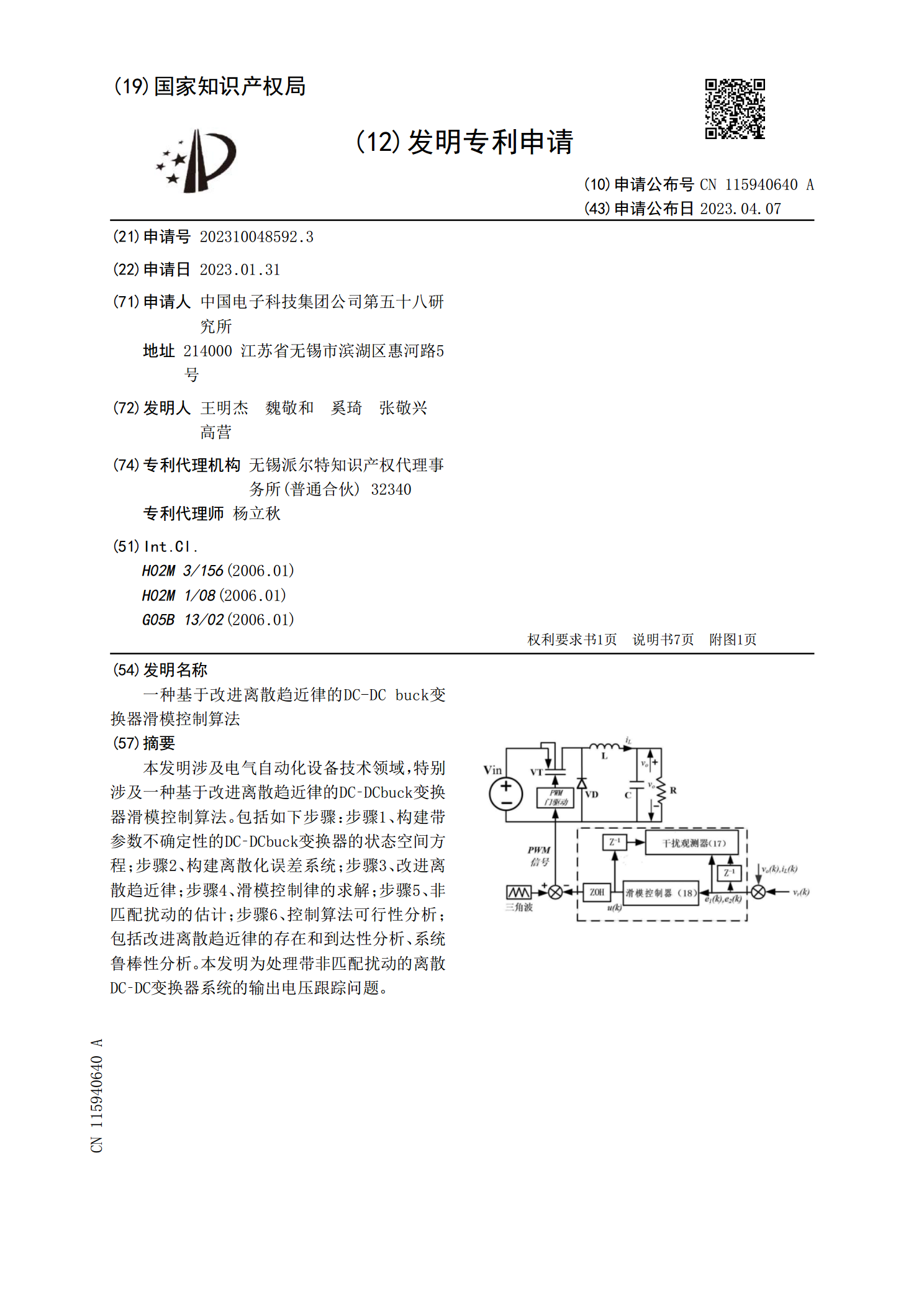
本发明涉及电气自动化设备技术领域,特别涉及一种基于改进离散趋近律的DC‑DCbuck变换器滑模控制算法。包括如下步骤:步骤1、构建带参数不确定性的DC‑DCbuck变换器的状态空间方程;步骤2、构建离散化误差系统;步骤3、改进离散趋近律;步骤4、滑模控制律的求解;步骤5、非匹配扰动的估计;步骤6、控制算法可行性分析;包括改进离散趋近律的存在和到达性分析、系统鲁棒性分析。本发明为处理带非匹配扰动的离散DC‑DC变换器系统的输出电压跟踪问题。

Buck变换器多幂次趋近律滑模控制研究.pptx
Buck变换器多幂次趋近律滑模控制研究目录Buck变换器滑模控制原理滑模控制基本概念Buck变换器滑模控制原理滑模控制优点与挑战多幂次趋近律算法研究幂次趋近律算法介绍多幂次趋近律算法原理算法实现与仿真验证Buck变换器滑模控制策略设计滑模控制器设计控制策略参数选择控制策略优化方法实验验证与结果分析实验平台搭建实验结果分析结果对比与讨论结论与展望研究成果总结未来研究方向感谢观看

一种基于死区离散趋近律的准滑模控制.docx
一种基于死区离散趋近律的准滑模控制基于死区离散趋近律的准滑模控制摘要:准滑模控制(quasi-slidingmodecontrol)是一种在控制系统中广泛应用的控制策略,它具有较强的鲁棒性和自适应性能。然而,在实际应用中,由于系统存在参数不确定性和外部扰动等因素,传统的准滑模控制方法往往会引入较大的震荡,并且还可能导致控制性能的下降。为了解决这一问题,本论文提出了一种基于死区离散趋近律的准滑模控制方法,通过引入死区技术和离散趋近律设计,实现了系统的较好控制性能。关键词:准滑模控制、死区技术、离散趋近律、鲁

基于改进趋近律的机械手滑模控制.docx
基于改进趋近律的机械手滑模控制基于改进趋近律的机械手滑模控制摘要:滑模控制是一种非线性控制方法,具有鲁棒性强、鲁棒性兼有性能等优点。然而,滑模控制器在实际应用中存在着滑模面趋近速度慢、系统参数不精确等问题。针对这些问题,本文基于改进趋近律的机械手滑模控制方法,通过引入自适应控制策略和改进的滑模面设计,提高了滑模控制器的控制性能。通过仿真实验验证了该方法的有效性。关键词:滑模控制;机械手;趋近律;自适应控制;非线性控制1.引言滑模控制作为一种非线性控制方法,在工程应用中具有广泛的应用前景。然而,由于系统非线

基于ESO的Buck型变换器趋近律控制.docx
基于ESO的Buck型变换器趋近律控制基于ESO的Buck型变换器趋近律控制摘要:随着电力电子技术的发展,变换器的应用越来越广泛。Buck型变换器作为一种常用的降压型变换器,在实际应用中具有较高的效率和性能。然而,由于其非线性特性和各种不确定性的存在,传统的PID控制方法往往无法满足需求。因此,基于ESO(ExtendedStateObserver)的趋近律控制方法在Buck型变换器的控制中得到了广泛的应用。本文首先介绍了Buck型变换器的基本原理和工作原理,然后详细阐述了ESO的原理和应用及其在Buck