
一种轮椅座椅位姿调节机构.pdf

一吃****新冬


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮椅座椅位姿调节机构.pdf
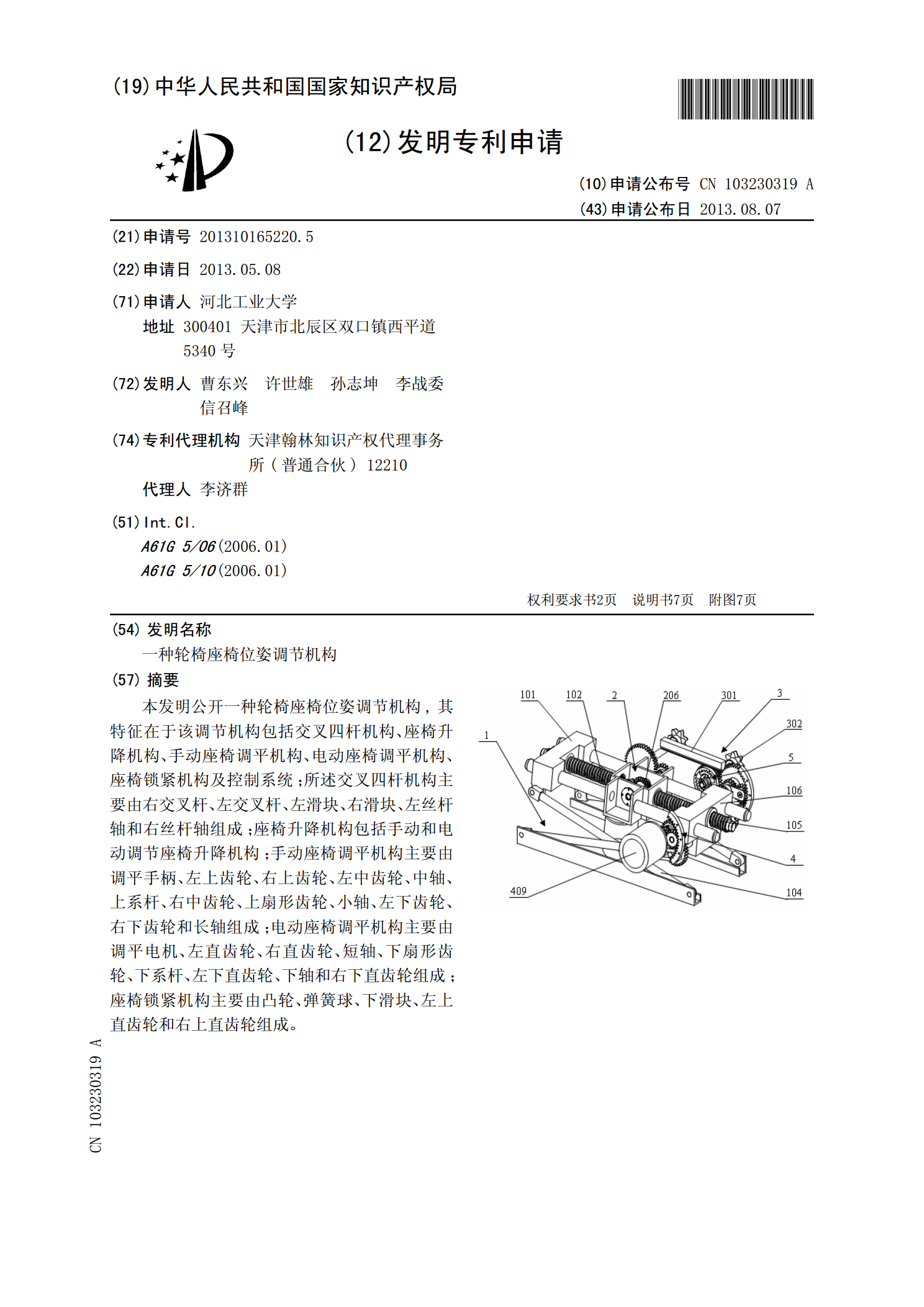
本发明公开一种轮椅座椅位姿调节机构,其特征在于该调节机构包括交叉四杆机构、座椅升降机构、手动座椅调平机构、电动座椅调平机构、座椅锁紧机构及控制系统;所述交叉四杆机构主要由右交叉杆、左交叉杆、左滑块、右滑块、左丝杆轴和右丝杆轴组成;座椅升降机构包括手动和电动调节座椅升降机构;手动座椅调平机构主要由调平手柄、左上齿轮、右上齿轮、左中齿轮、中轴、上系杆、右中齿轮、上扇形齿轮、小轴、左下齿轮、右下齿轮和长轴组成;电动座椅调平机构主要由调平电机、左直齿轮、右直齿轮、短轴、下扇形齿轮、下系杆、左下直齿轮、下轴和右下直
一种座椅调节机构、座椅及车辆.pdf
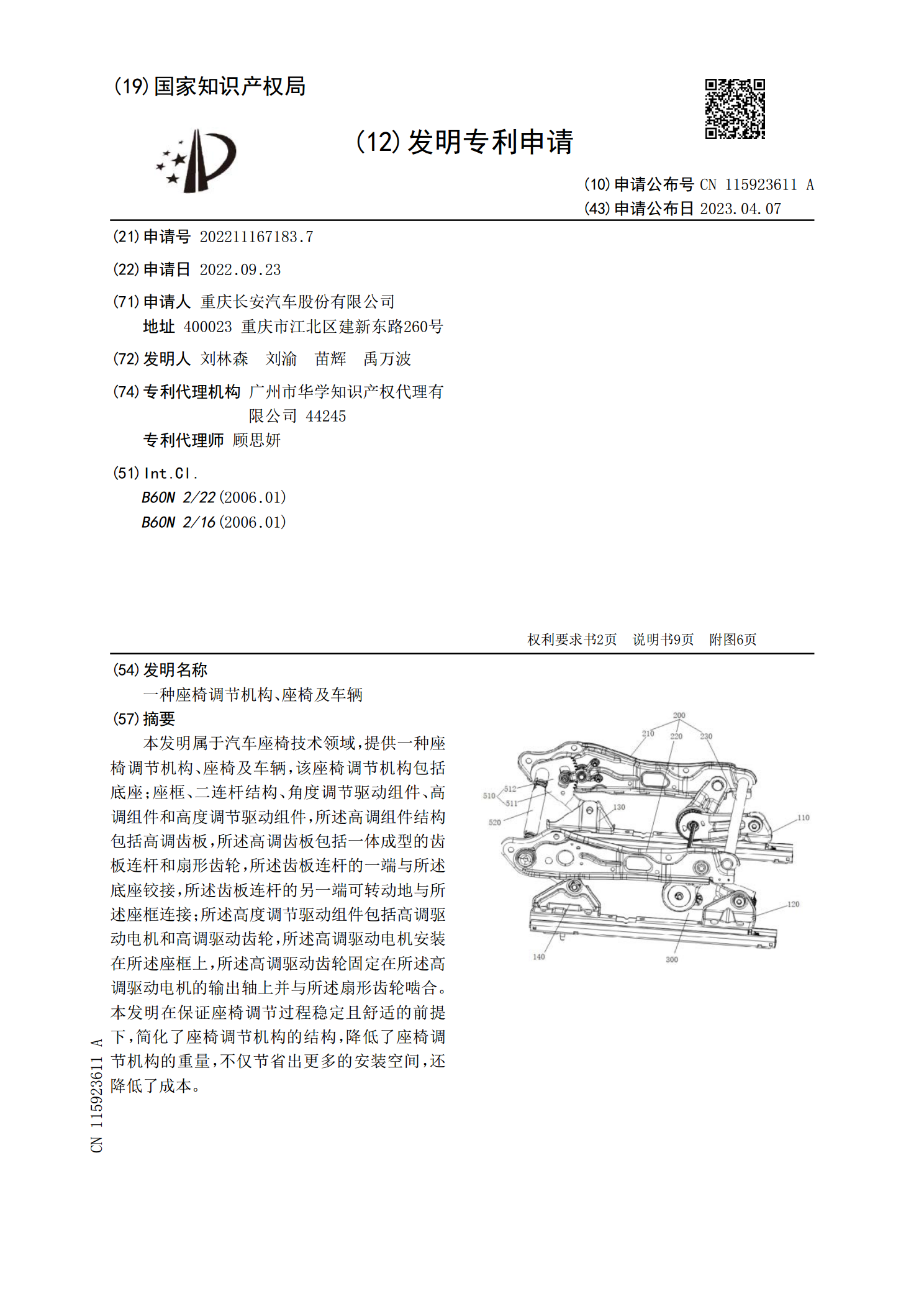
本发明属于汽车座椅技术领域,提供一种座椅调节机构、座椅及车辆,该座椅调节机构包括底座;座框、二连杆结构、角度调节驱动组件、高调组件和高度调节驱动组件,所述高调组件结构包括高调齿板,所述高调齿板包括一体成型的齿板连杆和扇形齿轮,所述齿板连杆的一端与所述底座铰接,所述齿板连杆的另一端可转动地与所述座框连接;所述高度调节驱动组件包括高调驱动电机和高调驱动齿轮,所述高调驱动电机安装在所述座框上,所述高调驱动齿轮固定在所述高调驱动电机的输出轴上并与所述扇形齿轮啮合。本发明在保证座椅调节过程稳定且舒适的前提下,简化了

一种集成靠背支撑的汽车座椅舒适躺姿调节机构.pdf
本发明提供一种集成靠背支撑的汽车座椅舒适躺姿调节机构,包括靠背支撑结构和躺姿支撑调节结构,靠背支撑结构和躺姿支撑调节结构两侧分别共用一个主支架,主支架上端通过挂接件挂接在座椅骨架上横梁上,靠背支撑结构是在靠背位置两侧主支架之间连接支撑钢丝,躺姿支撑调节结构包括主支架下部和连接在主支架下端部EPP支撑块;主支架在座垫与靠背咬合位置为U形,U形中间位置与旋转支撑轴可旋转连接,旋转支撑轴两端与座椅骨架两侧固定连接,本发明在躺姿时减小甚至消除坐垫与靠背咬合位置的压力差,从而实现舒适躺姿。

一种轮椅用位姿调整扶手.pdf
本发明提供了一种轮椅用位姿调整扶手,包括与轮椅连接的基座、把手和连接基座与把手的立杆,立杆的端部连接有一转动开关,立杆的杆体与基座沿周向自由配合,立杆底部设置有将立杆沿周向固定的锁紧机构,所述转动开关能够使立杆在自由转动和在当前转动位置与锁紧机构固定配合两个状态之间切换。本发明提供的轮椅用位姿调整扶手的优点在于:用户可控制转动开关,通过转动把手拉动身体在轮椅上调整姿态,同时需要休息时可通过转动开关将把手在当前位置锁定,使用方便;另外能够辅助用户自主在不同位置之间转换,使手臂正常的残障人士能够自主完成不同位

一种座椅机构及设有该座椅机构的站立康复轮椅车.pdf
本发明提供了一种座椅机构,该座椅机构主要包括座垫与传动齿轮机构、伸缩杆、传动组件和第一驱动机构,此外本发明还提供一种设有该座椅机构的站立康复轮椅车,该站立康复轮椅车包括底盘行走机构、可旋转连接于底盘行走机构上部的扶手机构和辅助站立机构和与辅助站立机构可拆卸连接的穿戴装置以及将穿戴装置收紧的安全扣和安全绳,实现了使用者在站姿和坐姿之间的随意切换;本发明一种座椅机构及设有该座椅机构的站立康复轮椅车具有设计巧妙、结构紧凑、操作简单以及安全稳定等优点。