
AGV自动导航小车自组织模糊控制器研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

AGV自动导航小车自组织模糊控制器研究.docx
AGV自动导航小车自组织模糊控制器研究AGV自动导航小车自组织模糊控制器研究摘要:AGV自动导航小车已成为现代制造、物流、仓储等领域中不可或缺的设备,其自动导航算法尤其重要。本文提出了一种基于自组织模糊控制器的AGV自动导航小车控制算法,并通过实验验证了其有效性。关键词:AGV;自动导航;小车;自组织;模糊控制器一、引言随着现代制造业和物流业的不断发展,AGV自动导航小车作为自动化物流领域中的一种重要设备,在实际应用中已经具有广泛的应用和需求。AGV自动导航小车通常应用于工业生产线、仓储等场景,用来完成物

磁导航AGV模糊控制器的研究.docx
磁导航AGV模糊控制器的研究磁导航AGV模糊控制器的研究一、引言AGV(AutomatedGuidedVehicle)是指自动引导搬运车辆,它通过激光、视觉、磁导等导航方式进行定位导航,并利用自动化技术完成物料搬运、运输等作业。磁导航AGV是一种常用的AGV导航方式,它利用磁性导航标识物进行车辆的定位导航。本论文的研究目标是设计一种基于模糊控制的磁导航AGV控制器,提高磁导航AGV的定位精度和导航效果。二、磁导航AGV的基本原理磁导航AGV主要依赖磁性导航标识物进行定位导航。磁性导航标识物通常是在AGV所
导航系统、导航控制方法及装置、控制器、AGV小车.pdf
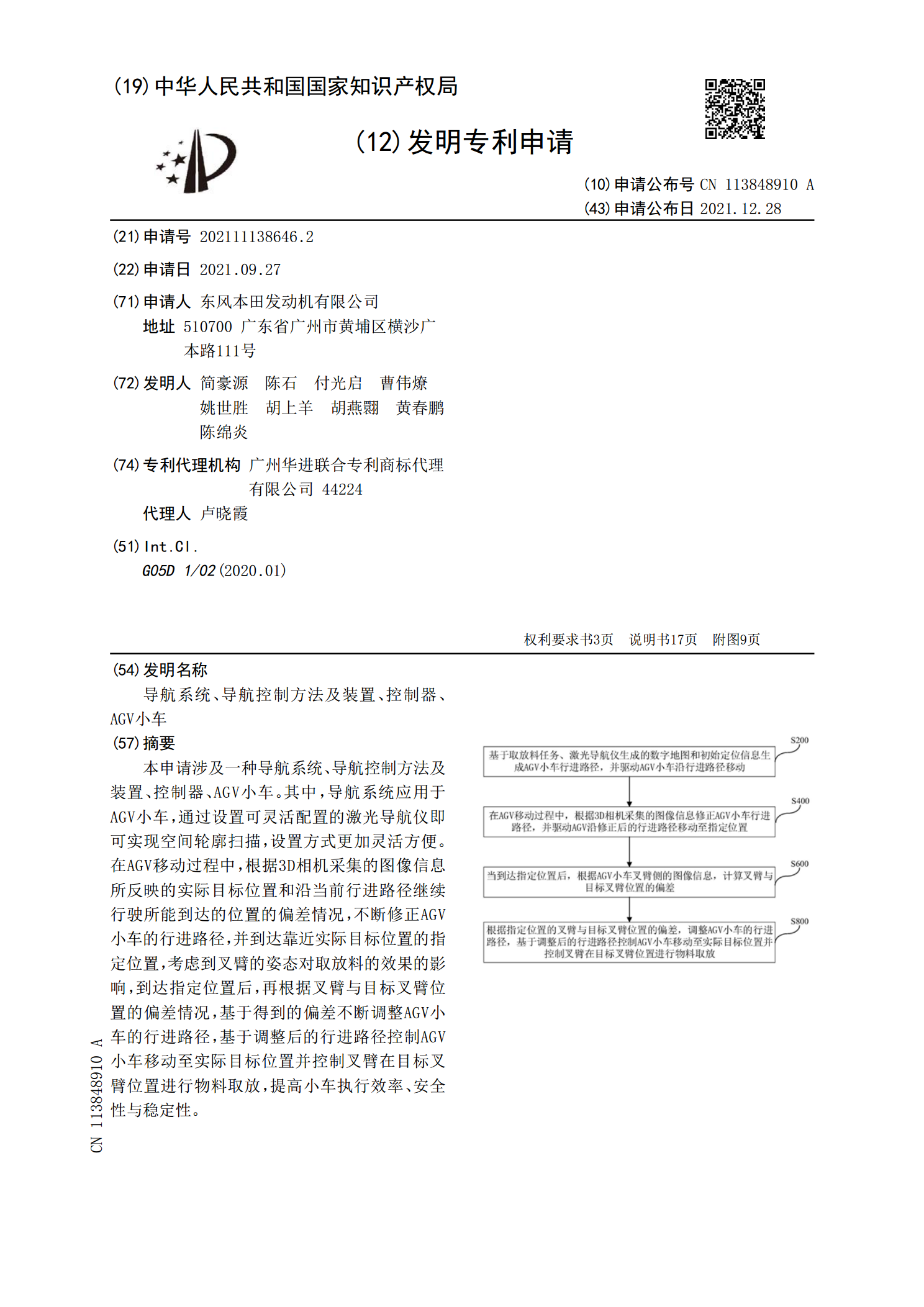
本申请涉及一种导航系统、导航控制方法及装置、控制器、AGV小车。其中,导航系统应用于AGV小车,通过设置可灵活配置的激光导航仪即可实现空间轮廓扫描,设置方式更加灵活方便。在AGV移动过程中,根据3D相机采集的图像信息所反映的实际目标位置和沿当前行进路径继续行驶所能到达的位置的偏差情况,不断修正AGV小车的行进路径,并到达靠近实际目标位置的指定位置,考虑到叉臂的姿态对取放料的效果的影响,到达指定位置后,再根据叉臂与目标叉臂位置的偏差情况,基于得到的偏差不断调整AGV小车的行进路径,基于调整后的行进路径控制A

一种自动导航AGV运输小车.pdf
本发明公开了一种自动导航AGV运输小车,包括AGV小车和RFID标签;所述的AGV小车主要由控制器、RFID读写器、前轮、前轮驱动装置、充电电池、后轮驱动装置、后轮、车架、减震弹簧、货物板、货物后挡板、货物侧挡板组成;所述的AGV小车行走的道路上铺有RFID标签;所述的RFID读写器可以阅读铺设在仓库道路上的RFID标签,并将阅读的RFID标签的数据传送给控制器,控制器通过接收的RFID标签的数据信息计算出AGV小车的位置;所述的控制器根据系统预设的目的地位置向前轮驱动装置发送指令,驱动前轮转动改变AGV

自动导引小车AGV的导航和避障技术研究.docx
自动导引小车AGV的导航和避障技术研究随着物流自动化的不断深入和智能制造的不断发展,自动导引小车AGV(AutomatedGuidedVehicle)已成为现代物流系统和生产线中必不可少的设备之一。AGV能够根据预定路线自主行驶,完成物品的搬运和仓储,降低人力成本和提高物流效率。然而,如何实现AGV的高精度导航和准确的避障,一直是AGV技术研究的难点。AGV的导航和避障技术,通常采用激光雷达、红外线、超声波等传感器进行测距和障碍物探测,通过这些传感器,AGV能够感知周围环境,自主制定路径和避障策略。本文将