
轮式起重机及其纠偏方法.pdf

是笛****加盟


1/8

2/8

3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮式起重机及其纠偏方法.pdf
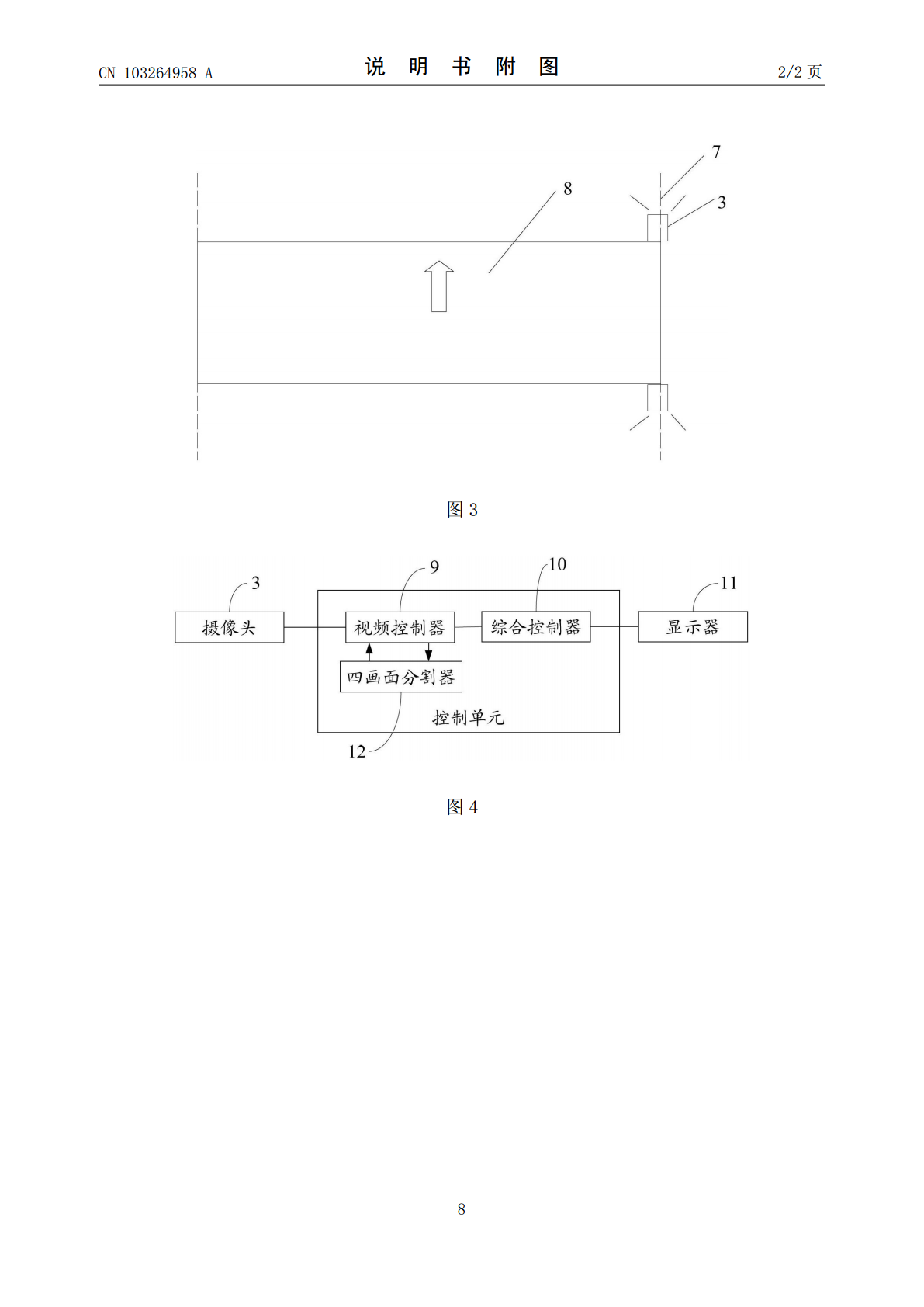
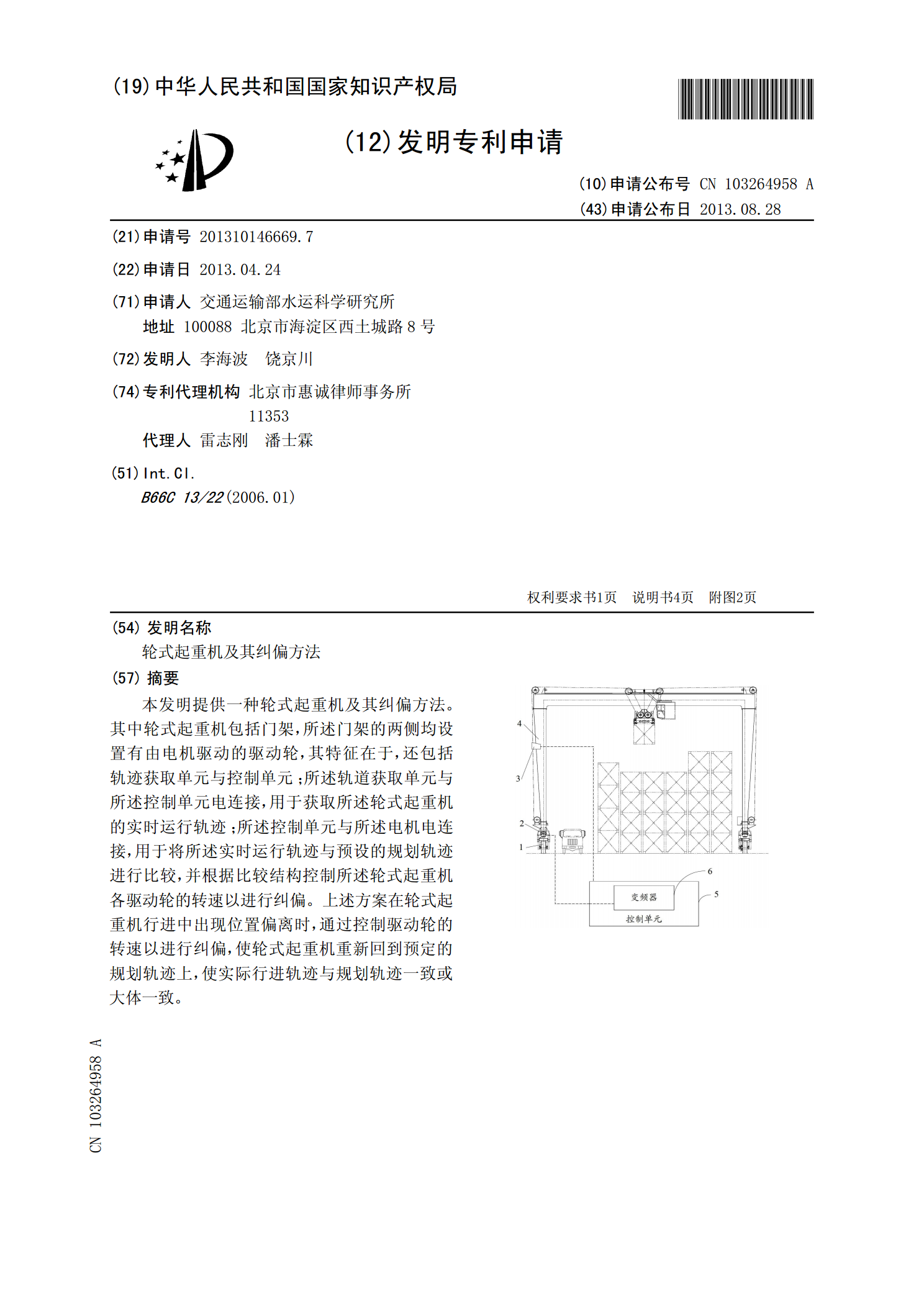
本发明提供一种轮式起重机及其纠偏方法。其中轮式起重机包括门架,所述门架的两侧均设置有由电机驱动的驱动轮,其特征在于,还包括轨迹获取单元与控制单元;所述轨道获取单元与所述控制单元电连接,用于获取所述轮式起重机的实时运行轨迹;所述控制单元与所述电机电连接,用于将所述实时运行轨迹与预设的规划轨迹进行比较,并根据比较结构控制所述轮式起重机各驱动轮的转速以进行纠偏。上述方案在轮式起重机行进中出现位置偏离时,通过控制驱动轮的转速以进行纠偏,使轮式起重机重新回到预定的规划轨迹上,使实际行进轨迹与规划轨迹一致或大体一致。
轮式起重机纠偏机构.pdf
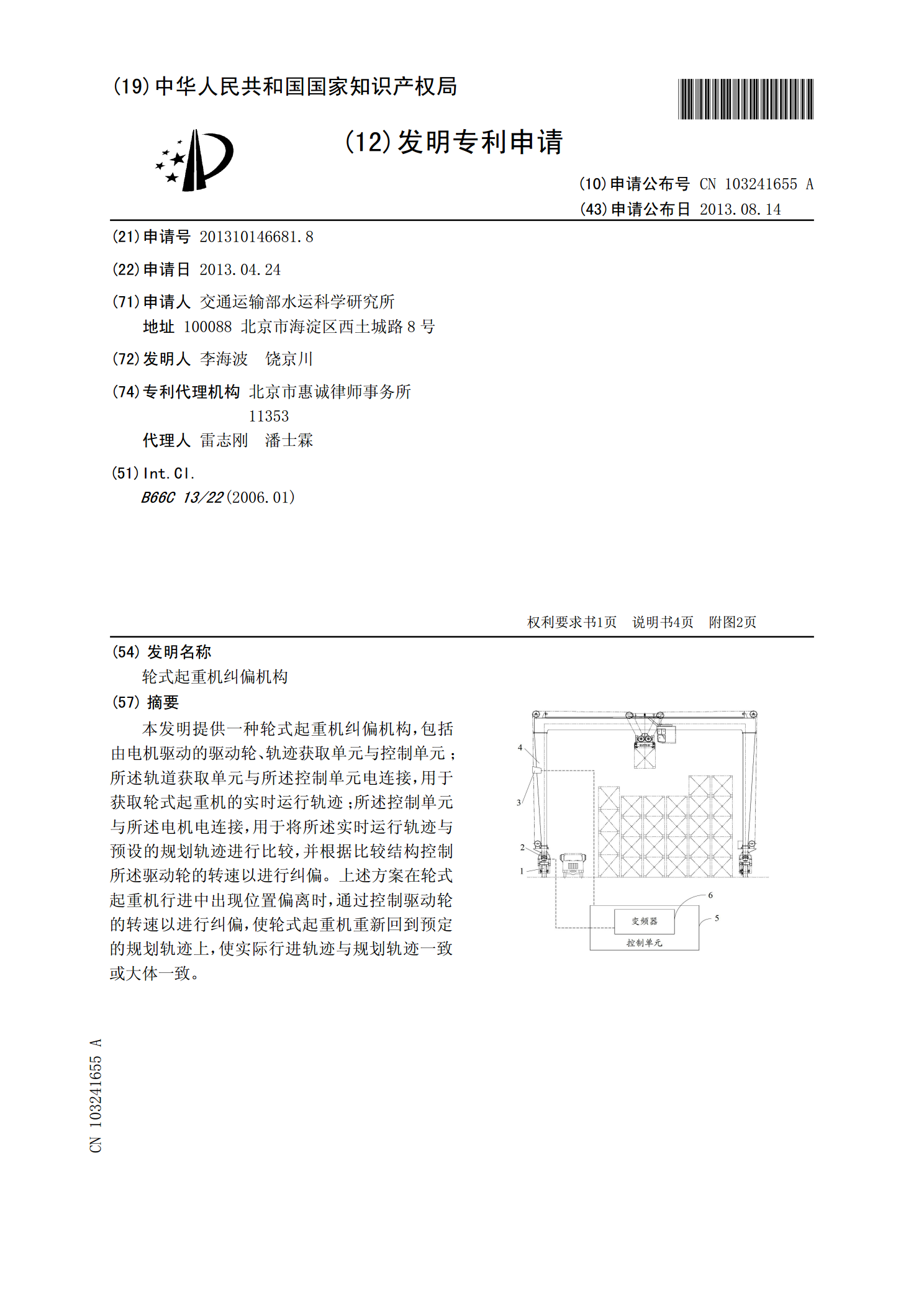
本发明提供一种轮式起重机纠偏机构,包括由电机驱动的驱动轮、轨迹获取单元与控制单元;所述轨道获取单元与所述控制单元电连接,用于获取轮式起重机的实时运行轨迹;所述控制单元与所述电机电连接,用于将所述实时运行轨迹与预设的规划轨迹进行比较,并根据比较结构控制所述驱动轮的转速以进行纠偏。上述方案在轮式起重机行进中出现位置偏离时,通过控制驱动轮的转速以进行纠偏,使轮式起重机重新回到预定的规划轨迹上,使实际行进轨迹与规划轨迹一致或大体一致。

纠偏系统、起重机及纠偏方法.pdf
本发明提供了一种纠偏系统,在大车的两侧分别增加水平轮,并在水平轮与大车连接的转轴上设置有销轴传感器,检测水平轮与轨道间的作用力,根据受力情况判断出轨道变形或两侧大车行走不同步,通过处理模块给执行模块的变频器发送指令调节大车的速度,来进行纠偏;在两侧大车的从动轮上分别安装绝对值编码器,通过测得数据的比较,作为销轴传感器检测系统的保护系统。本发明还提供了一种起重机及一种纠偏方法。本发明提供的纠偏系统,能够实时检测或者判断出轨道的变形,并进行轨道变形预警或保护停车;动态调整大车的速度,使大车在变形的轨道上继续行

起重机大车BPS自动纠偏方法和纠偏系统.pdf
本发明涉及一种起重机大车BPS自动纠偏方法和纠偏系统,分别在左、右两侧导轨上各设置一条条码带,并分别在车架上安装有相应的条形码阅读器,控制单元适时采集并比较两侧阅读器所读取条形码的数值,判断大车左、右两侧的驱动轮行程是否同步,当两侧驱动轮不同步时,控制单元通过降低超前一侧驱动轮转速或者增加落后一侧驱动轮转速的方式自动调节两侧驱动轮,保持两驱动轮位于同一条形码段。本发明能够准确及时地判断两侧行走轮是否偏向或偏向程度,确保控制电路能够及时做出调整驱动电机的转速的指令,从而具有更高的可靠性。由于起重机大车走偏检
轮式起重机悬架调节控制系统、方法、装置及轮式起重机.pdf
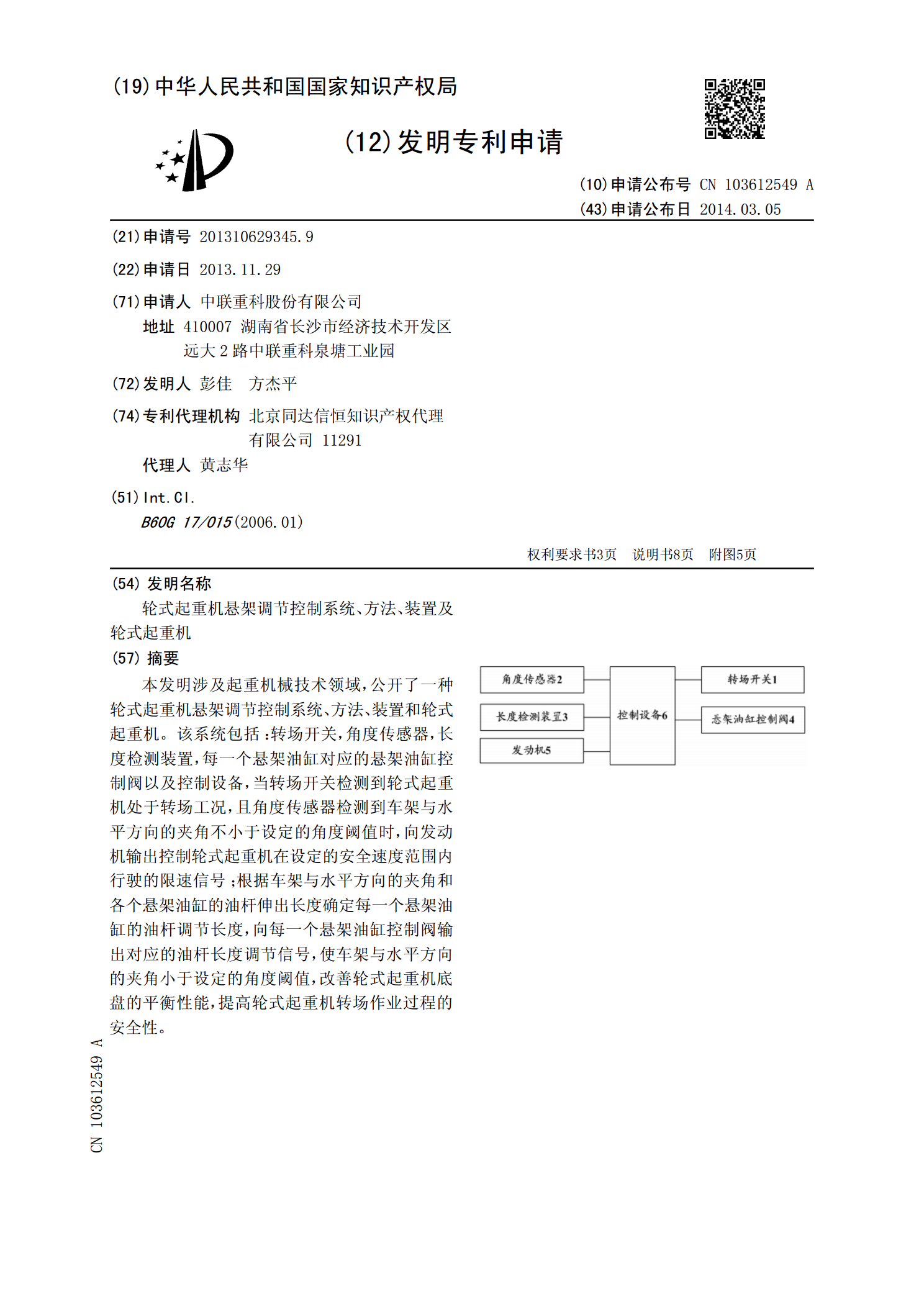
本发明涉及起重机械技术领域,公开了一种轮式起重机悬架调节控制系统、方法、装置和轮式起重机。该系统包括:转场开关,角度传感器,长度检测装置,每一个悬架油缸对应的悬架油缸控制阀以及控制设备,当转场开关检测到轮式起重机处于转场工况,且角度传感器检测到车架与水平方向的夹角不小于设定的角度阈值时,向发动机输出控制轮式起重机在设定的安全速度范围内行驶的限速信号;根据车架与水平方向的夹角和各个悬架油缸的油杆伸出长度确定每一个悬架油缸的油杆调节长度,向每一个悬架油缸控制阀输出对应的油杆长度调节信号,使车架与水平方向的夹角