
一种蛇形机器人六向内嵌独立伸缩式轮腿躯干模块.pdf

沛芹****ng

1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种蛇形机器人六向内嵌独立伸缩式轮腿躯干模块.pdf
本发明公开了一种蛇形机器人六向内嵌独立伸缩式轮腿躯干模块。该模块包括内槽壳、基座、舵机、旋杆、轮杆和被动轮。基座圆周上均匀分布六个槽室,分别在其内部安装轮腿复合机构。蛇形机器人在运动过程中,通过内置传感器的独立控制或者上位机控制,实现不同地形环境下不同运动模式的选择,从不伸缩到单腿伸缩再到多腿伸缩,可实现复杂地形环境下可控伸缩躯体变形。该躯干模块构建的蛇形机器人能保证在蜿蜒、蠕动、滚转等基本仿生学运动的基础上实现滑动、爬行和二维变形,可有效提高蛇形机器人的运行速度和地形适应能力。
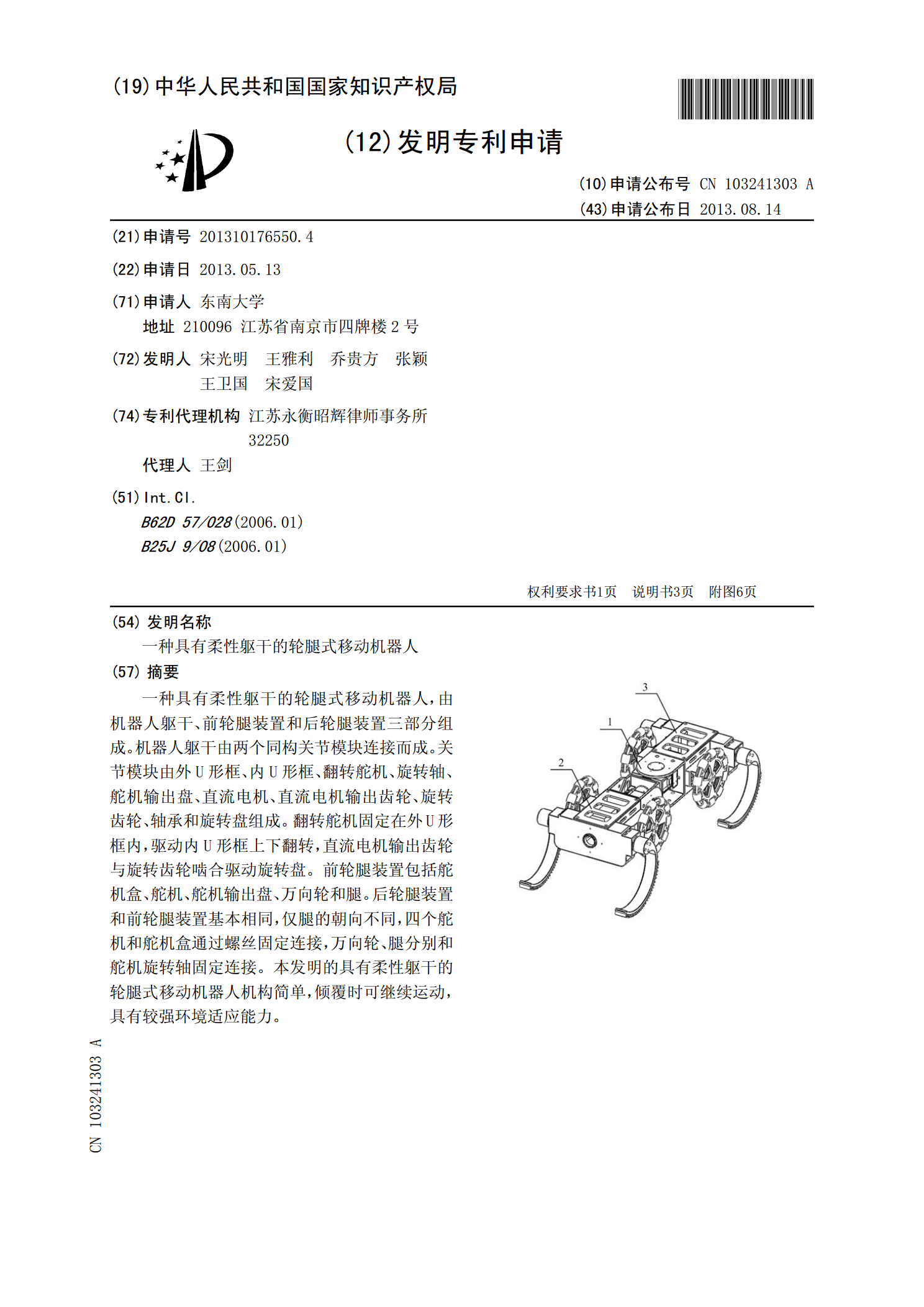
一种具有柔性躯干的轮腿式移动机器人.pdf
一种具有柔性躯干的轮腿式移动机器人,由机器人躯干、前轮腿装置和后轮腿装置三部分组成。机器人躯干由两个同构关节模块连接而成。关节模块由外U形框、内U形框、翻转舵机、旋转轴、舵机输出盘、直流电机、直流电机输出齿轮、旋转齿轮、轴承和旋转盘组成。翻转舵机固定在外U形框内,驱动内U形框上下翻转,直流电机输出齿轮与旋转齿轮啮合驱动旋转盘。前轮腿装置包括舵机盒、舵机、舵机输出盘、万向轮和腿。后轮腿装置和前轮腿装置基本相同,仅腿的朝向不同,四个舵机和舵机盒通过螺丝固定连接,万向轮、腿分别和舵机旋转轴固定连接。本发明的具有

一种蛇形机器人的电磁式八向独立可伸缩轮式机构.pdf
本发明公开了一种蛇形机器人的电磁式八向独立可伸缩轮式机构,该机构包括外壳、连接盘、重力传感装置、伸缩轮孔、伸缩轮、伸缩轴、推拉杆、电磁铁装置、永磁滑块和基座。外壳上均匀分布着八个伸缩轮孔,蛇形机器人在运动过程中,通过重力传感装置的控制,触发电磁铁装置工作,永磁滑块在相应磁力作用下带动推拉杆,将与触地的伸缩轮孔相邻的两个伸缩轮推出,触地方向改变时伸缩轮缩回,其相应的伸缩轮再伸出,从而实现蛇形机器人轮式运动中轮子的伸缩功能。该伸缩轮式机构具有装置简单,加工容易的特点,能保证机器人在翻转时快速响应,轮子伸缩迅速
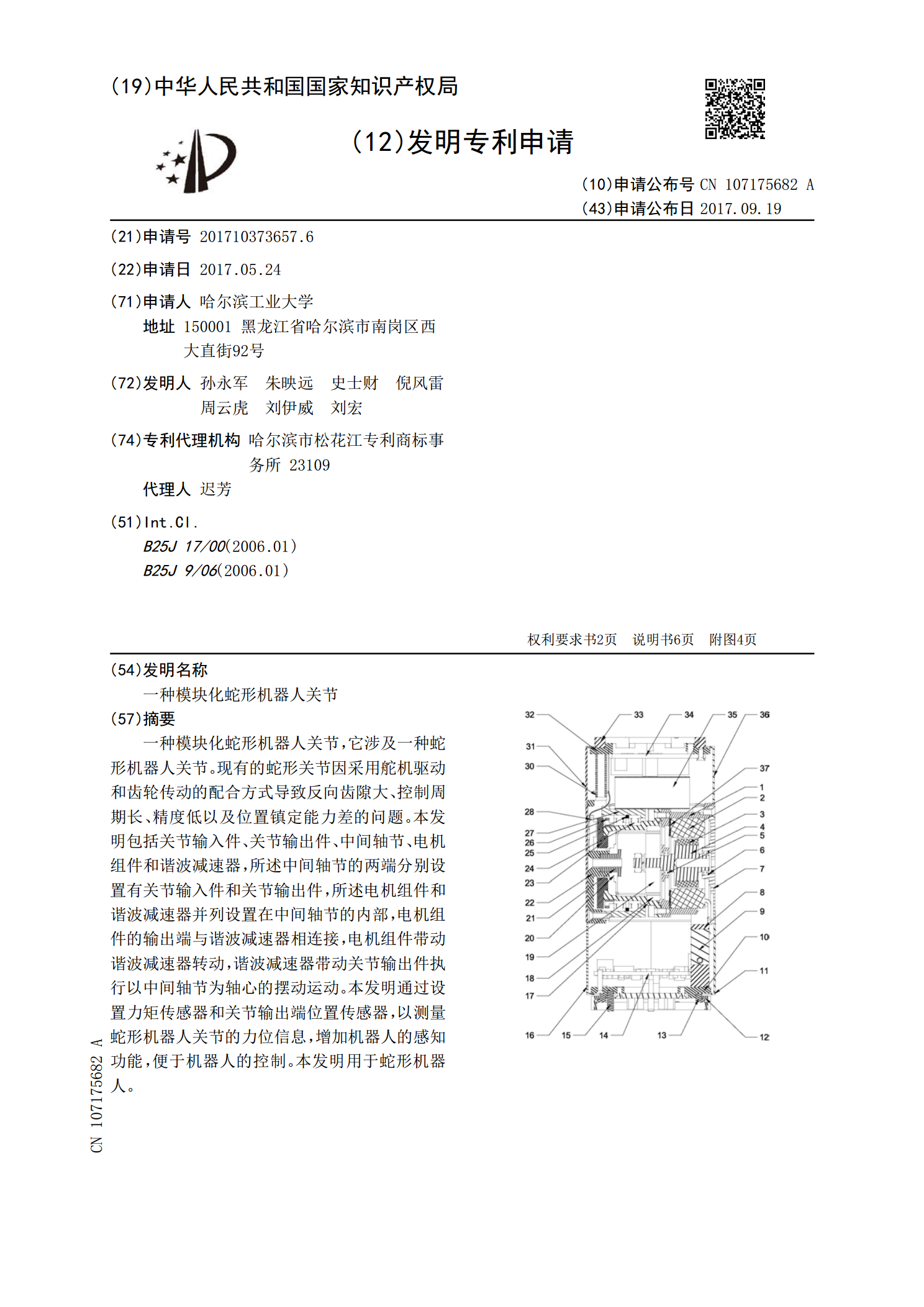
一种模块化蛇形机器人关节.pdf
一种模块化蛇形机器人关节,它涉及一种蛇形机器人关节。现有的蛇形关节因采用舵机驱动和齿轮传动的配合方式导致反向齿隙大、控制周期长、精度低以及位置镇定能力差的问题。本发明包括关节输入件、关节输出件、中间轴节、电机组件和谐波减速器,所述中间轴节的两端分别设置有关节输入件和关节输出件,所述电机组件和谐波减速器并列设置在中间轴节的内部,电机组件的输出端与谐波减速器相连接,电机组件带动谐波减速器转动,谐波减速器带动关节输出件执行以中间轴节为轴心的摆动运动。本发明通过设置力矩传感器和关节输出端位置传感器,以测量蛇形机器
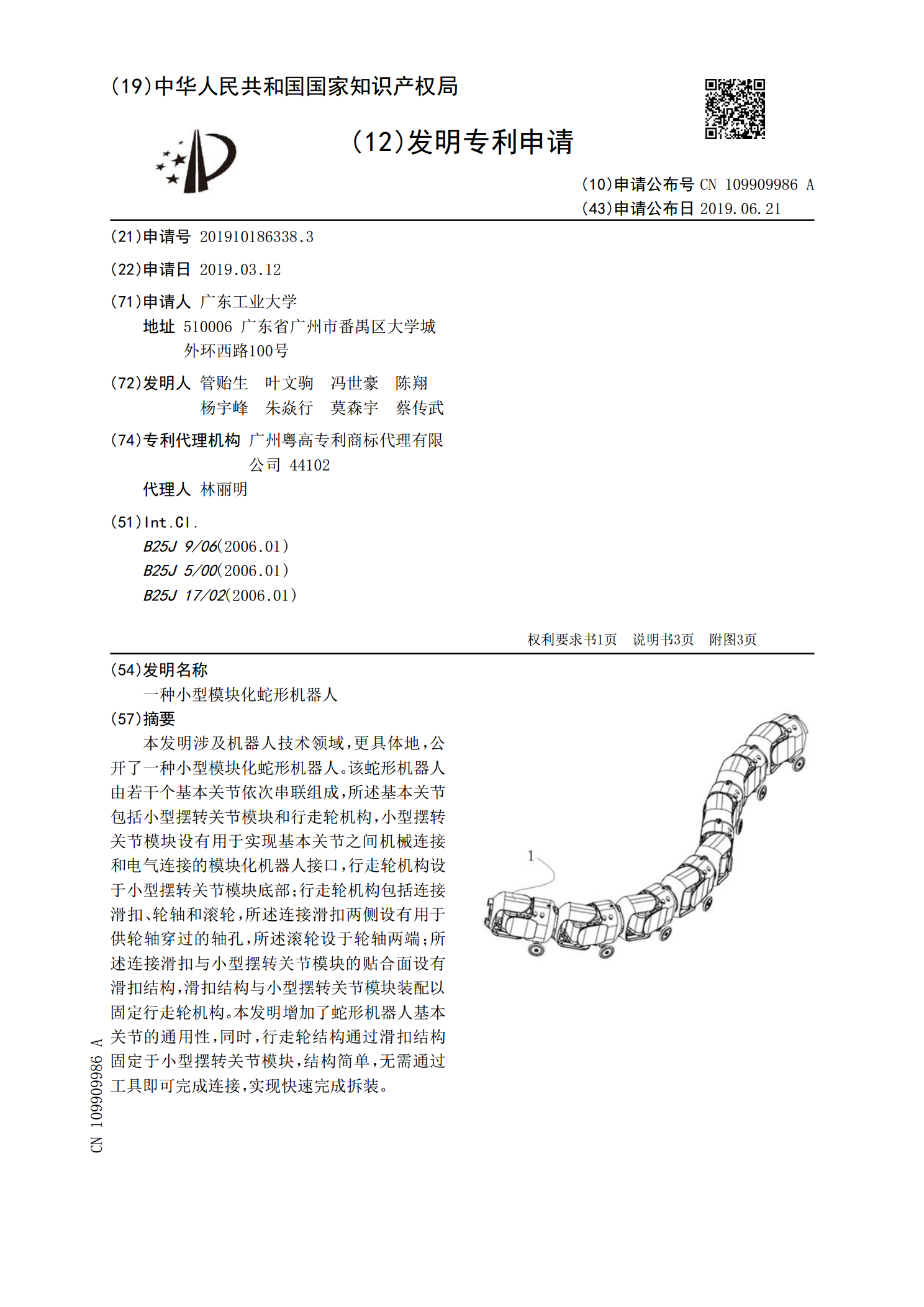
一种小型模块化蛇形机器人.pdf
本发明涉及机器人技术领域,更具体地,公开了一种小型模块化蛇形机器人。该蛇形机器人由若干个基本关节依次串联组成,所述基本关节包括小型摆转关节模块和行走轮机构,小型摆转关节模块设有用于实现基本关节之间机械连接和电气连接的模块化机器人接口,行走轮机构设于小型摆转关节模块底部;行走轮机构包括连接滑扣、轮轴和滚轮,所述连接滑扣两侧设有用于供轮轴穿过的轴孔,所述滚轮设于轮轴两端;所述连接滑扣与小型摆转关节模块的贴合面设有滑扣结构,滑扣结构与小型摆转关节模块装配以固定行走轮机构。本发明增加了蛇形机器人基本关节的通用性,