
一种小型模块化蛇形机器人.pdf

一只****ua


1/8
2/8
3/8
4/8
5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种小型模块化蛇形机器人.pdf
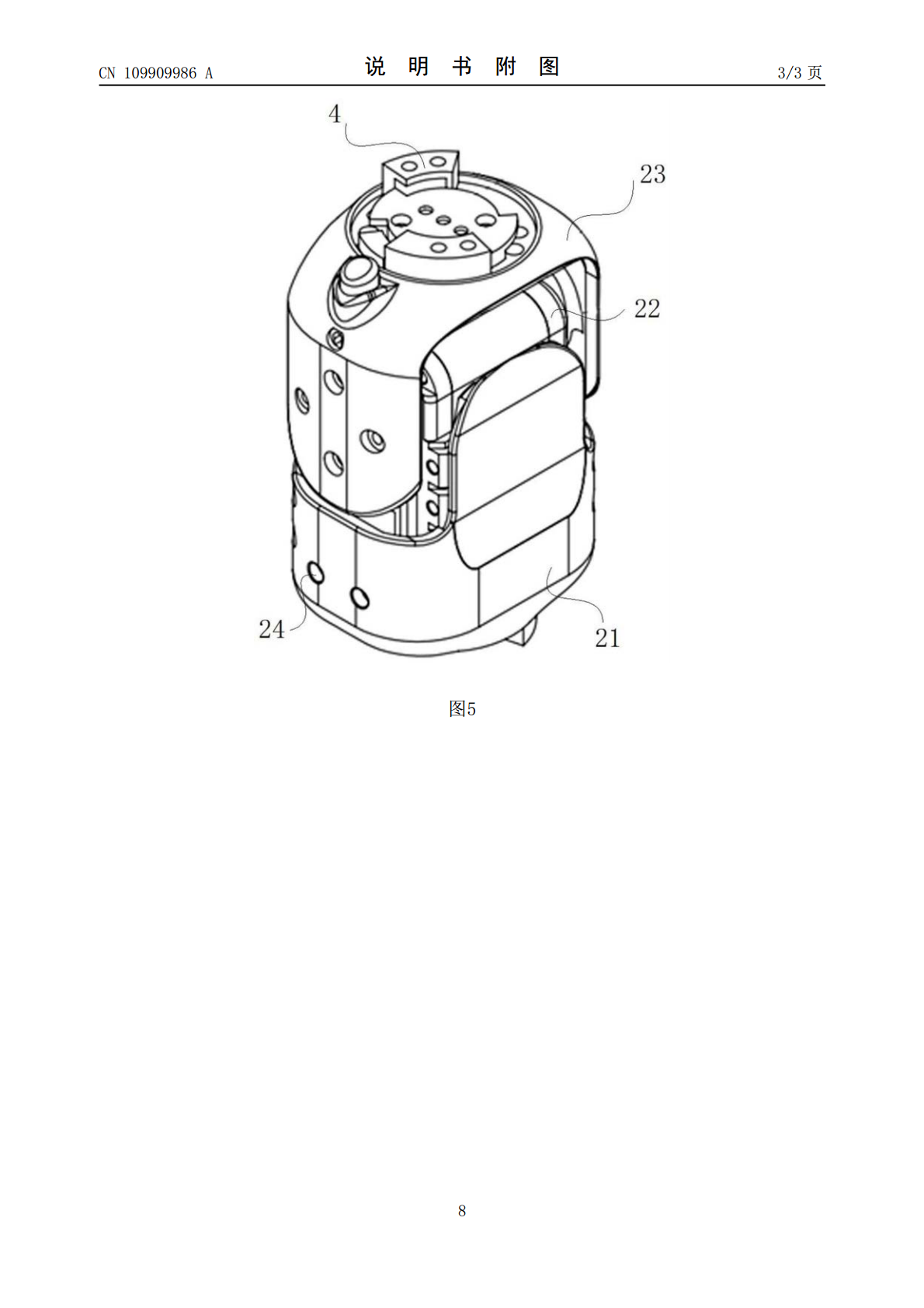
本发明涉及机器人技术领域,更具体地,公开了一种小型模块化蛇形机器人。该蛇形机器人由若干个基本关节依次串联组成,所述基本关节包括小型摆转关节模块和行走轮机构,小型摆转关节模块设有用于实现基本关节之间机械连接和电气连接的模块化机器人接口,行走轮机构设于小型摆转关节模块底部;行走轮机构包括连接滑扣、轮轴和滚轮,所述连接滑扣两侧设有用于供轮轴穿过的轴孔,所述滚轮设于轮轴两端;所述连接滑扣与小型摆转关节模块的贴合面设有滑扣结构,滑扣结构与小型摆转关节模块装配以固定行走轮机构。本发明增加了蛇形机器人基本关节的通用性,
一种模块化蛇形机器人关节.pdf
一种模块化蛇形机器人关节,它涉及一种蛇形机器人关节。现有的蛇形关节因采用舵机驱动和齿轮传动的配合方式导致反向齿隙大、控制周期长、精度低以及位置镇定能力差的问题。本发明包括关节输入件、关节输出件、中间轴节、电机组件和谐波减速器,所述中间轴节的两端分别设置有关节输入件和关节输出件,所述电机组件和谐波减速器并列设置在中间轴节的内部,电机组件的输出端与谐波减速器相连接,电机组件带动谐波减速器转动,谐波减速器带动关节输出件执行以中间轴节为轴心的摆动运动。本发明通过设置力矩传感器和关节输出端位置传感器,以测量蛇形机器
一种蛇形机器人的模块化变刚度关节机构.pdf
本发明公开了一种蛇形机器人的模块化变刚度关节机构,属于机器人研究与工程领域,当全向轮围绕模块中轴线转动时,蛇形机器人能够实现轮式运动;当关节中的并联直线驱动器伸缩时,全向轮中的各个小被动轮与地面接触产生各向异性摩擦力实现蛇形运动,此外,轮的两侧有偏盖,可以对轮体起到一定的保护作用。同时,磁流变阻尼环节的阻尼力控制是和支链运动控制分开的,可以根据需求,通过控制活塞头的线圈的电流大小来改变磁流套筒内的磁场强度,改变磁流变液的状态,进而达到控制阻尼力,实现变刚度的功能。该环节既不影响蛇形机器人实现各种运动步态,

模块化蛇形机器人的设计与研究的中期报告.docx
模块化蛇形机器人的设计与研究的中期报告一、项目背景概述随着机器人技术的逐步发展和应用,越来越多的机器人开始走出实验室,进入到现实生活中。但是,有些特殊的环境下,传统的机器人往往难以胜任。例如,人工难以到达的狭小、危险或高温场景中。这时,蛇形机器人就显得非常有用了。蛇形机器人是一种能够像蛇一样灵活移动的机器人,可在狭小的空间内进行探测、检修等任务。但是,现有的蛇形机器人大多是通过管道或者水泥工业中的固定结构进行设计,模块化设计还有很大的发展空间。因此,本项目旨在研究和设计一种基于模块化设计的蛇形机器人。二、

模块化蛇形机器人的设计与研究的任务书.docx
模块化蛇形机器人的设计与研究的任务书任务书:模块化蛇形机器人的设计与研究一、任务目标本项目旨在设计与研究一种模块化蛇形机器人,通过模块组合的方式,实现机器人的灵活运动和适应不同环境的能力。具体任务目标如下:1.设计蛇形机器人的机械结构,包括关节、连杆和模块等部件;2.研究蛇形机器人的运动学和动力学特性,建立相应的数学模型;3.开发控制算法,实现蛇形机器人的运动控制;4.搭建实验平台,进行蛇形机器人的实验验证;5.对蛇形机器人进行性能测试和分析,评估其适用性和可行性。二、任务内容1.系统调研与需求分析:(1