
一种模块化蛇形机器人关节.pdf

康佳****文库

1/10

2/10

3/10
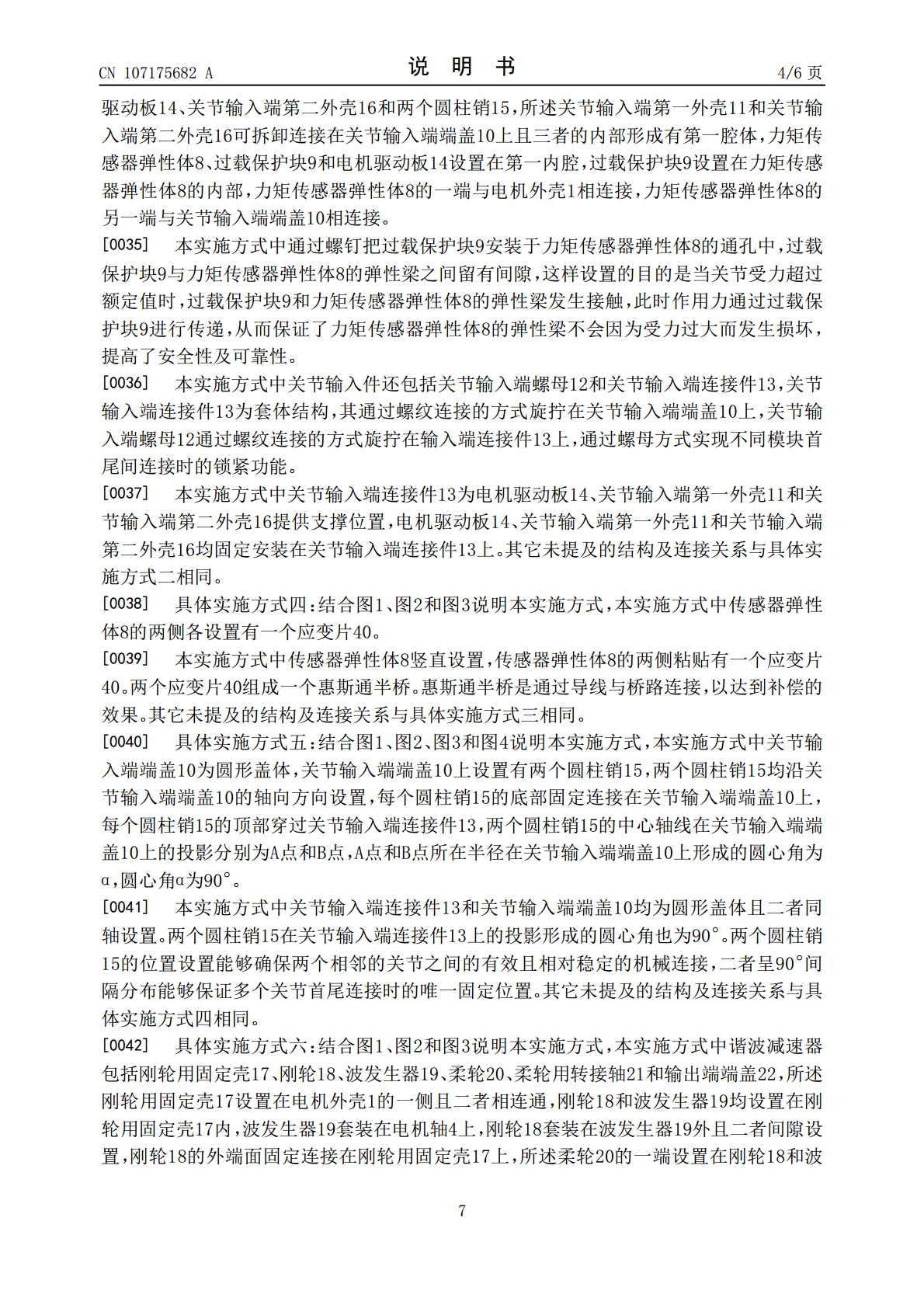
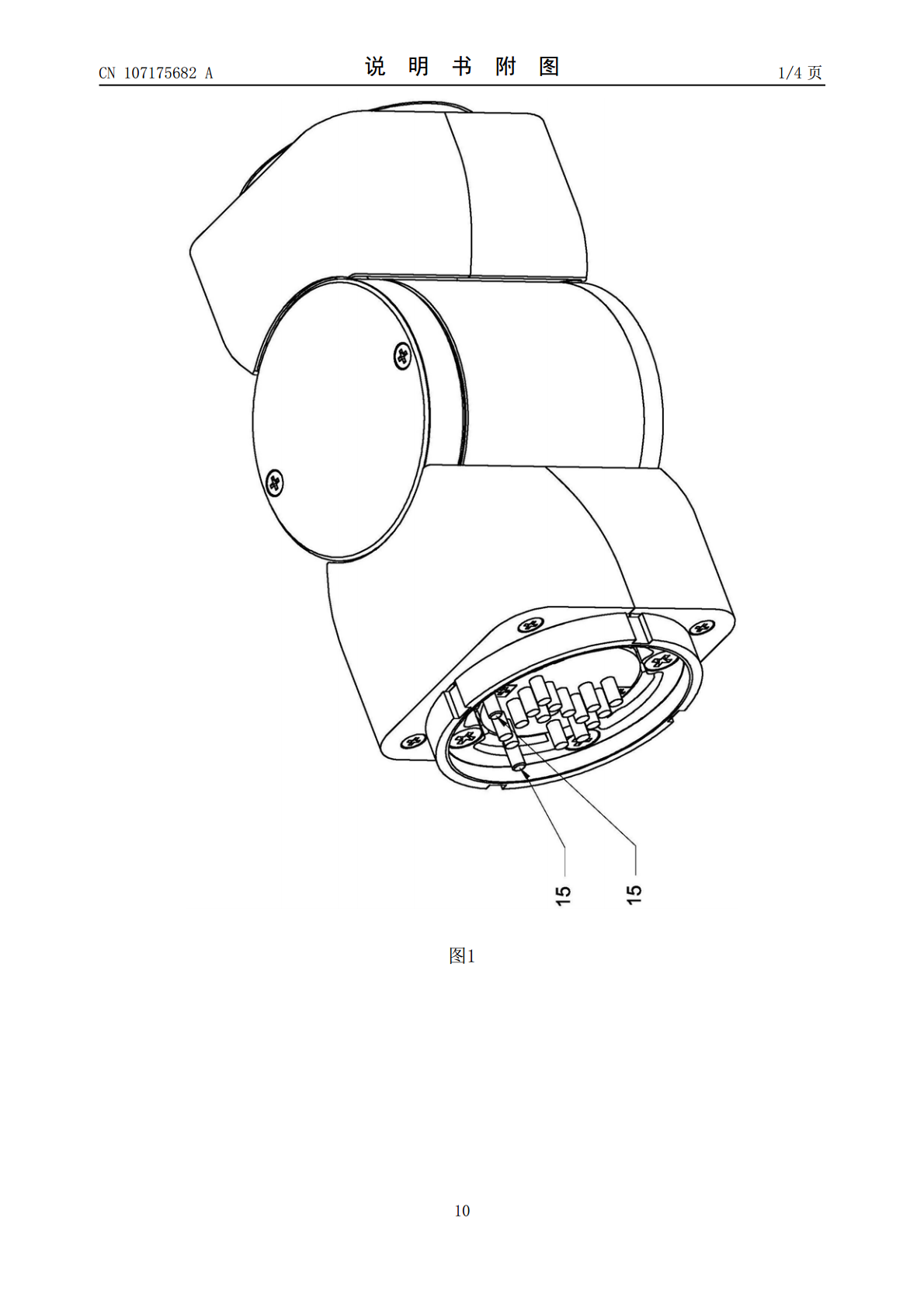
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种模块化蛇形机器人关节.pdf
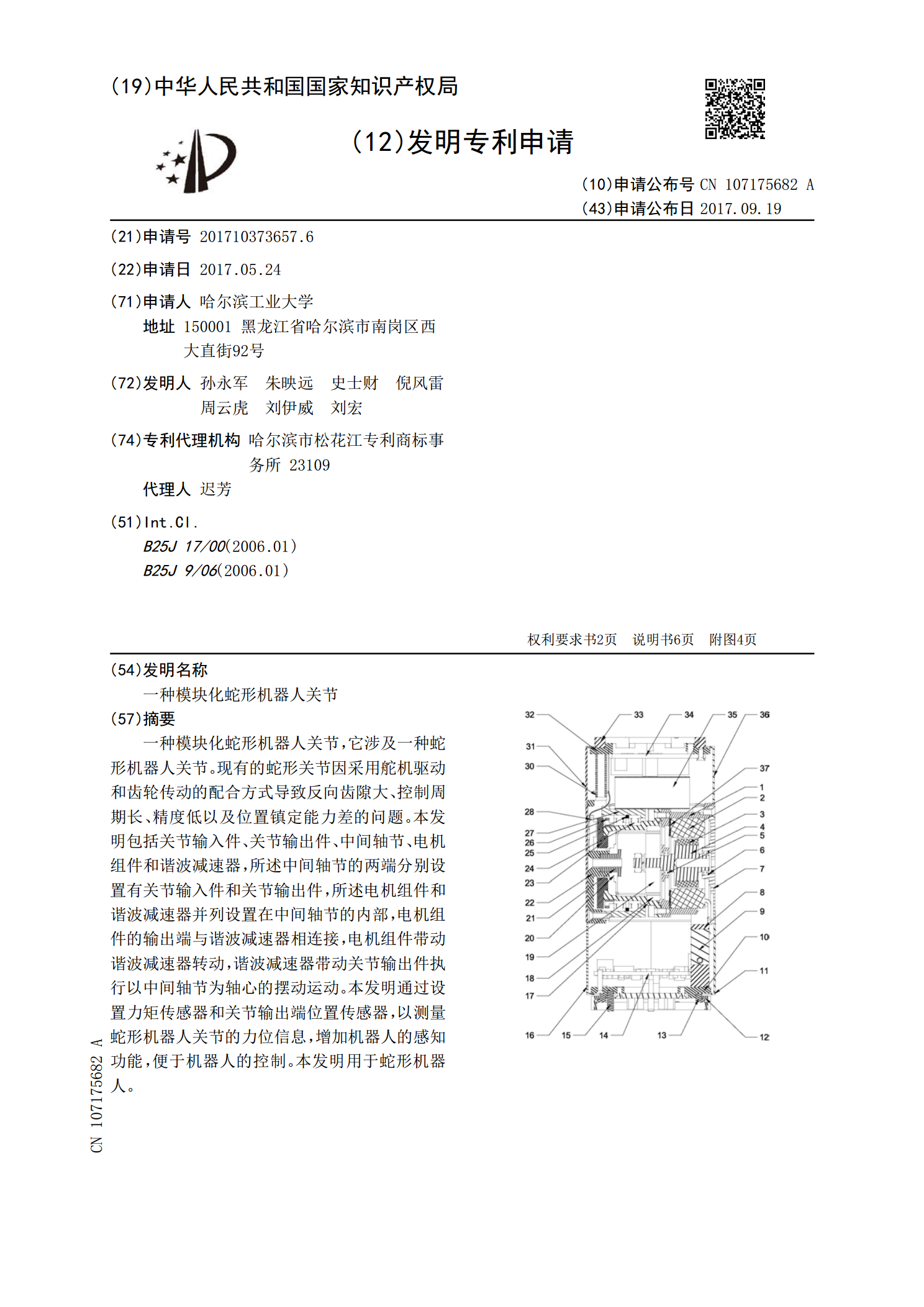
一种模块化蛇形机器人关节,它涉及一种蛇形机器人关节。现有的蛇形关节因采用舵机驱动和齿轮传动的配合方式导致反向齿隙大、控制周期长、精度低以及位置镇定能力差的问题。本发明包括关节输入件、关节输出件、中间轴节、电机组件和谐波减速器,所述中间轴节的两端分别设置有关节输入件和关节输出件,所述电机组件和谐波减速器并列设置在中间轴节的内部,电机组件的输出端与谐波减速器相连接,电机组件带动谐波减速器转动,谐波减速器带动关节输出件执行以中间轴节为轴心的摆动运动。本发明通过设置力矩传感器和关节输出端位置传感器,以测量蛇形机器
一种蛇形机器人的模块化变刚度关节机构.pdf
本发明公开了一种蛇形机器人的模块化变刚度关节机构,属于机器人研究与工程领域,当全向轮围绕模块中轴线转动时,蛇形机器人能够实现轮式运动;当关节中的并联直线驱动器伸缩时,全向轮中的各个小被动轮与地面接触产生各向异性摩擦力实现蛇形运动,此外,轮的两侧有偏盖,可以对轮体起到一定的保护作用。同时,磁流变阻尼环节的阻尼力控制是和支链运动控制分开的,可以根据需求,通过控制活塞头的线圈的电流大小来改变磁流套筒内的磁场强度,改变磁流变液的状态,进而达到控制阻尼力,实现变刚度的功能。该环节既不影响蛇形机器人实现各种运动步态,
一种可全向移动的模块化蛇形多关节爬壁机器人.pdf
本发明公开了一种可全向移动的模块化蛇形多关节爬壁机器人,爬壁机器人包括由爬壁机器人头部至尾部依次连接的执行模块、头部模块组、头部移动模块、中间模块组、尾部移动模块和尾部模块组;执行模块的首部设置有用于完成工作任务的执行装置;头部模块组、中间模块组和尾部模块组均包括至少一个关节模块;头部移动模块和尾部移动模块的两侧均设置有全向轮,头部移动模块和尾部移动模块的底部均设置有移动模块磁吸附装置。本发明在一般的全向移动爬壁机器人的基础上结合了蛇形机器人的多关节结构设计及其模块化设计思路,使得该多关节爬壁机器人具有在
一种小型模块化蛇形机器人.pdf
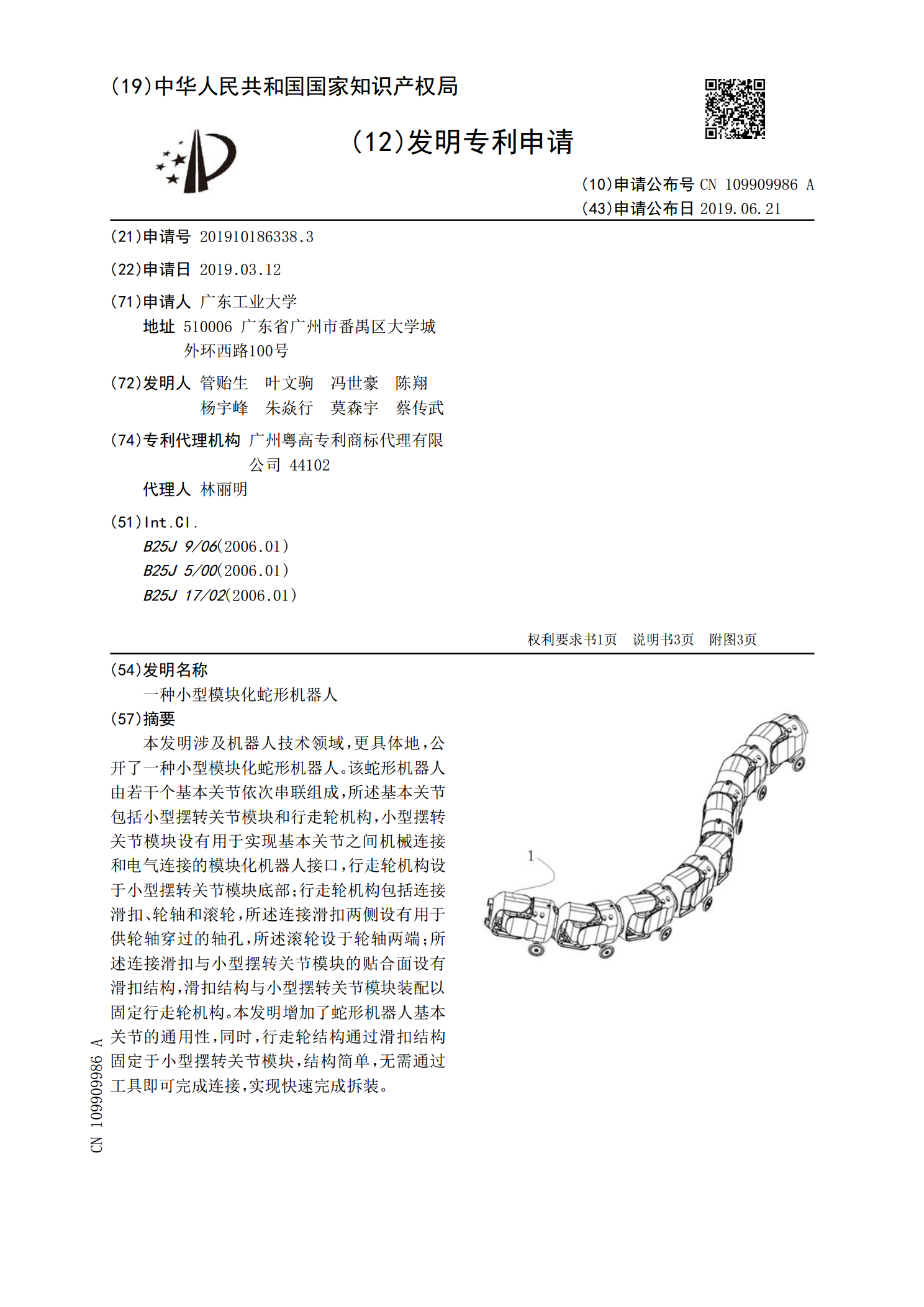
本发明涉及机器人技术领域,更具体地,公开了一种小型模块化蛇形机器人。该蛇形机器人由若干个基本关节依次串联组成,所述基本关节包括小型摆转关节模块和行走轮机构,小型摆转关节模块设有用于实现基本关节之间机械连接和电气连接的模块化机器人接口,行走轮机构设于小型摆转关节模块底部;行走轮机构包括连接滑扣、轮轴和滚轮,所述连接滑扣两侧设有用于供轮轴穿过的轴孔,所述滚轮设于轮轴两端;所述连接滑扣与小型摆转关节模块的贴合面设有滑扣结构,滑扣结构与小型摆转关节模块装配以固定行走轮机构。本发明增加了蛇形机器人基本关节的通用性,
一种蛇形水压灭火的机器人关节.pdf
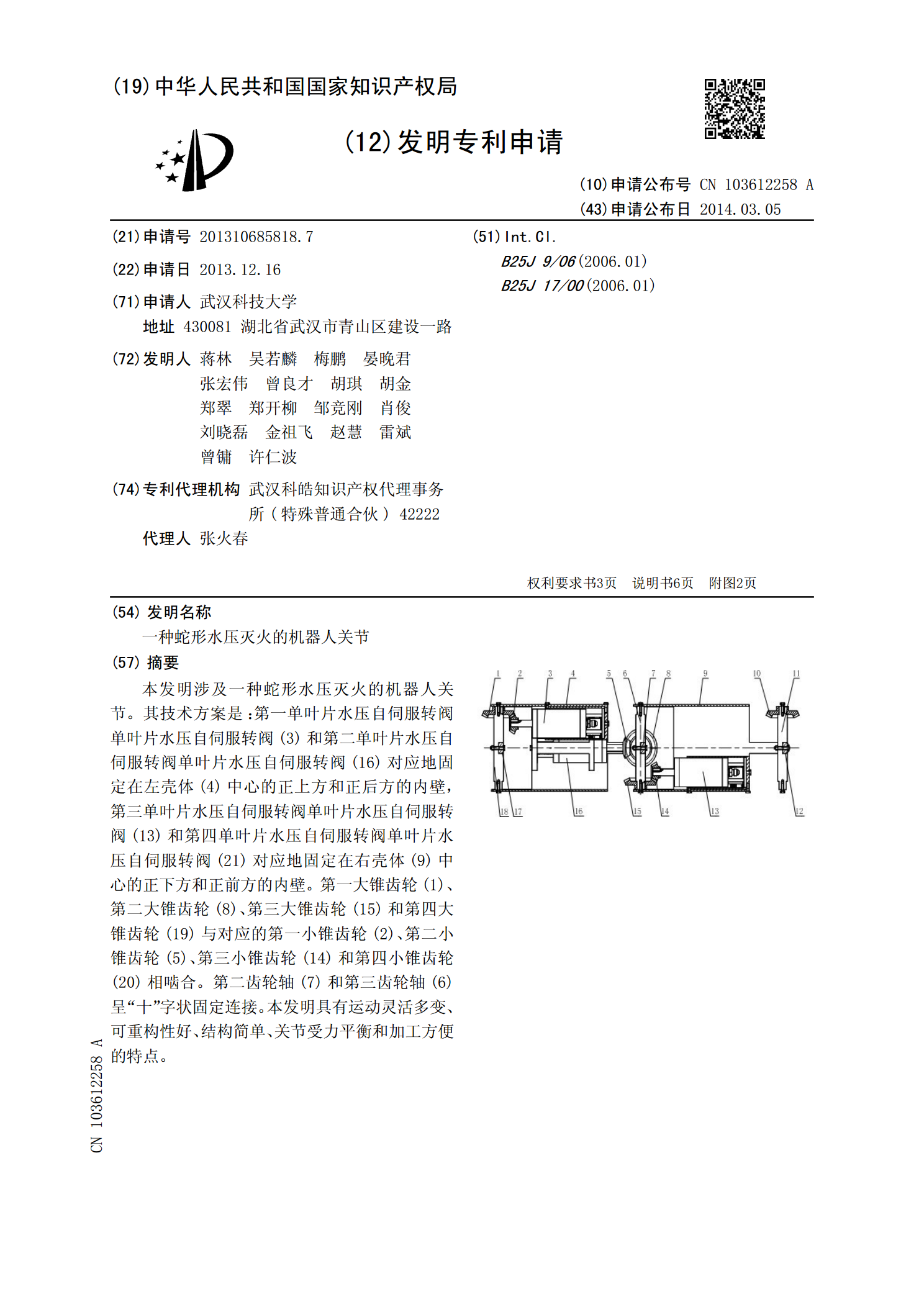
本发明涉及一种蛇形水压灭火的机器人关节。其技术方案是:第一单叶片水压自伺服转阀单叶片水压自伺服转阀(3)和第二单叶片水压自伺服转阀单叶片水压自伺服转阀(16)对应地固定在左壳体(4)中心的正上方和正后方的内壁,第三单叶片水压自伺服转阀单叶片水压自伺服转阀(13)和第四单叶片水压自伺服转阀单叶片水压自伺服转阀(21)对应地固定在右壳体(9)中心的正下方和正前方的内壁。第一大锥齿轮(1)、第二大锥齿轮(8)、第三大锥齿轮(15)和第四大锥齿轮(19)与对应的第一小锥齿轮(2)、第二小锥齿轮(5)、第三小锥齿轮