
四杆机构与轮式复合移动机器人的研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四杆机构与轮式复合移动机器人的研究的综述报告.docx
四杆机构与轮式复合移动机器人的研究的综述报告四杆机构是现代机械设计中一种常见的运动机构,它通过四个杆件相互连接,将旋转运动转换为直线运动或者平移运动。四杆机构广泛应用于机械制造、机械加工、自动化生产线等领域。最近,随着机器人技术的发展,四杆机构也被应用于轮式复合移动机器人中,成为了一种新的研究方向。轮式复合移动机器人是指具有轮式行走功能和其他移动功能,如机械臂挥动、抓取物体等的机器人。轮式复合移动机器人的运动学和动力学研究是该研究领域的重要方面。四杆机构在轮式复合移动机器人中的应用,不仅可以提高机器人的运

四杆机构与轮式复合移动机器人的研究的任务书.docx
四杆机构与轮式复合移动机器人的研究的任务书任务名称:四杆机构与轮式复合移动机器人的研究任务背景:随着国家对机器人技术的支持和投资不断加大,机器人技术已经广泛应用到各个领域。特别是在工业制造、智能制造、医疗、军事等领域中,机器人已经成为不可或缺的工具和设备。其中移动机器人作为机器人中的重要一类,其应用范围和贡献也越来越受到人们的关注。任务内容:本次任务的主要目标是研究四杆机构与轮式复合移动机器人的设计、仿真与控制。具体包括以下内容:1.四杆机构的设计和仿真研究:研究四杆机构的运动学、动力学原理,进行四杆机构
基于四连杆机构的轮式跳跃机构.pdf
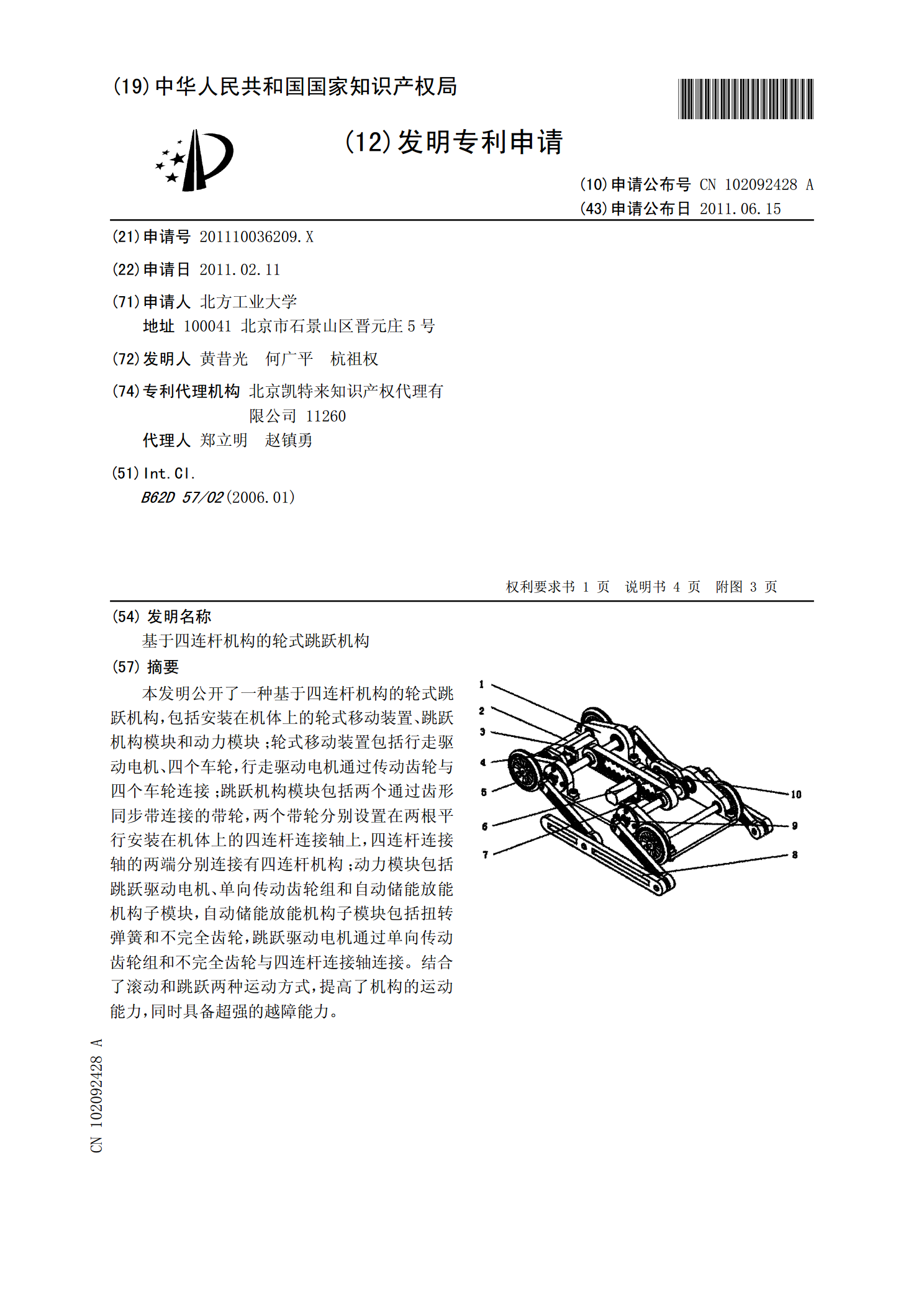
本发明公开了一种基于四连杆机构的轮式跳跃机构,包括安装在机体上的轮式移动装置、跳跃机构模块和动力模块;轮式移动装置包括行走驱动电机、四个车轮,行走驱动电机通过传动齿轮与四个车轮连接;跳跃机构模块包括两个通过齿形同步带连接的带轮,两个带轮分别设置在两根平行安装在机体上的四连杆连接轴上,四连杆连接轴的两端分别连接有四连杆机构;动力模块包括跳跃驱动电机、单向传动齿轮组和自动储能放能机构子模块,自动储能放能机构子模块包括扭转弹簧和不完全齿轮,跳跃驱动电机通过单向传动齿轮组和不完全齿轮与四连杆连接轴连接。结合了滚动

基于空间四杆机构的灵巧移动平台研究的综述报告.docx
基于空间四杆机构的灵巧移动平台研究的综述报告本文将围绕基于空间四杆机构的灵巧移动平台进行综述报告。首先将介绍灵巧移动平台的概念和应用场景,然后将解释空间四杆机构的结构和运动学模型,接下来将分析不同类型的灵巧移动平台的特点和优缺点,并讨论当前的研究和发展方向。最后将总结本文的贡献和未来的研究方向。灵巧移动平台的概念和应用场景灵巧移动平台是一种可以在不同地形和环境中运动和执行任务的移动机器人。它可以被用于军事侦察、消防救援、抢险救灾、勘探探测、医疗卫生、家庭服务以及其他需要人机协作的应用场景。灵巧移动平台通常

轮式移动机器人研究综述-朱磊磊.doc
(完整word版)轮式移动机器人研究综述_朱磊磊(完整word版)轮式移动机器人研究综述_朱磊磊(完整word版)轮式移动机器人研究综述_朱磊磊2009年8月机床与液压Aug.2009第37卷第8期MACHINETOOL&HYDRAULICSVol.37No.8DOI:10。3969/j.issn。1001-3881.2009。08.079轮式移动机器人研究综述朱磊磊,陈军(西北农林科技大学机械与电子工程学院,陕西西安712100)摘要:分析了轮式移动机器人的研究现状,按照车轮数目对轮式移动机器人进行了归