
小型移动水质在线监测船避障方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

小型移动水质在线监测船避障方法研究.docx
小型移动水质在线监测船避障方法研究小型移动水质在线监测船避障方法研究摘要:随着环境保护意识的增强和水质监测需求的日益增加,移动水质在线监测船成为了一种重要的水质监测设备。然而,在船舶自主避障方面还存在着一定的挑战。本文基于传感器数据处理技术与避障算法,阐述了小型移动水质在线监测船避障方法的研究。1.引言1.1背景水质在线监测是确保水环境安全与保护水资源的重要手段之一。传统的水质监测常常需要人工采样和实验室分析,费时费力且结果延迟。而移动水质在线监测船具有快速、高效、实时的特点,成为提高水质监测效率的有效工
自移动设备的避障方法、装置以及避障设备.pdf
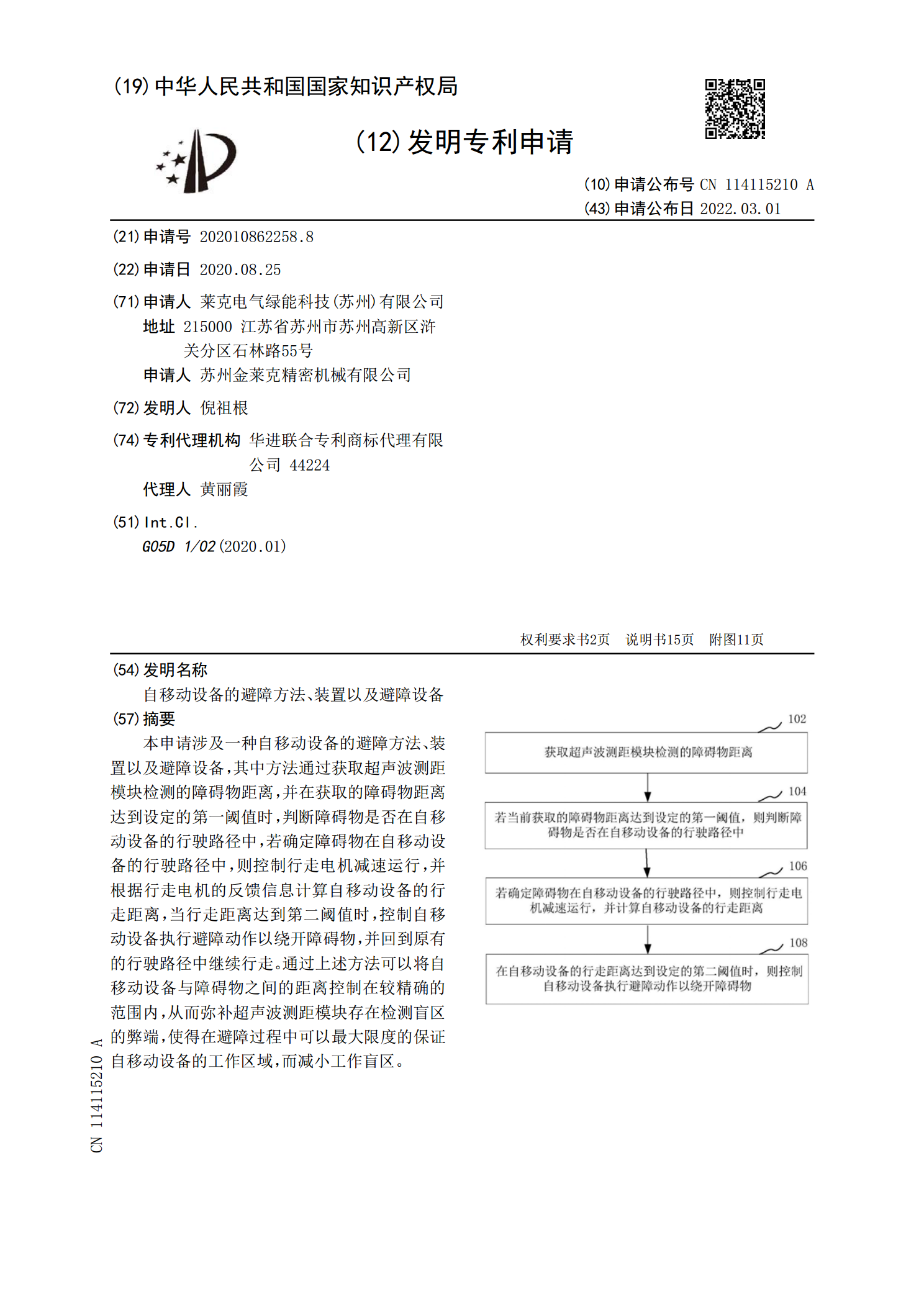
本申请涉及一种自移动设备的避障方法、装置以及避障设备,其中方法通过获取超声波测距模块检测的障碍物距离,并在获取的障碍物距离达到设定的第一阈值时,判断障碍物是否在自移动设备的行驶路径中,若确定障碍物在自移动设备的行驶路径中,则控制行走电机减速运行,并根据行走电机的反馈信息计算自移动设备的行走距离,当行走距离达到第二阈值时,控制自移动设备执行避障动作以绕开障碍物,并回到原有的行驶路径中继续行走。通过上述方法可以将自移动设备与障碍物之间的距离控制在较精确的范围内,从而弥补超声波测距模块存在检测盲区的弊端,使得在

小型移动在线水质监测系统的研究的综述报告.docx
小型移动在线水质监测系统的研究的综述报告随着经济的发展和全球化进程的加快,环保问题已经成为人们关注的热点问题之一。水资源是人类生命和经济发展的基础,而水质则是衡量水资源的重要指标。然而,水质受到诸如化学污染、生物污染、无机污染等多个方面的影响,因此,开发并推广一种高效、实时的水质监测系统变得刻不容缓。在国内外的水质监测领域中,小型移动在线水质监测系统受到越来越广泛的关注和应用。该系统结合了移动互联网技术、传感器技术、远程控制技术等多种现代技术手段,可以实时采集水质数据,并通过网络进行远程传输和监测。同时,

传感网络群移动节点协同避障方法研究.docx
传感网络群移动节点协同避障方法研究标题:传感网络群移动节点协同避障方法研究摘要:随着无线传感网络技术的不断发展,传感网络群中移动节点的协同工作对于实现高效、稳定的数据传输至关重要。然而,传感网络群在移动过程中面临各种障碍物的避让问题。本论文针对传感网络群移动节点的协同避障方法展开研究,通过分析相关论文和研究成果,提出了几种有效的协同避障方法,并分析了其优缺点,为传感网络群移动节点的协同避障提供了参考。1.引言随着无线传感技术的快速发展,传感网络应用越来越广泛,尤其是在各类监测、环境感知和救灾等领域,传感网

面向移动障碍的MWSN节点协同避障方法研究.docx
面向移动障碍的MWSN节点协同避障方法研究标题:面向移动障碍的MWSN节点协同避障方法研究摘要:随着无线传感器网络(WirelessSensorNetwork,WSN)的发展,移动无线传感器网络(MobileWirelessSensorNetwork,MWSN)的研究逐渐受到关注。在MWSN中,节点需要协同工作来完成任务,但在复杂环境中,移动障碍会对节点之间的协同通信和数据传输提出挑战。本文针对移动障碍的存在,研究了一种面向移动障碍的MWSN节点协同避障方法。首先,对移动障碍的运动行为进行建模,并在传感器