
面向移动障碍的MWSN节点协同避障方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

面向移动障碍的MWSN节点协同避障方法研究.docx
面向移动障碍的MWSN节点协同避障方法研究标题:面向移动障碍的MWSN节点协同避障方法研究摘要:随着无线传感器网络(WirelessSensorNetwork,WSN)的发展,移动无线传感器网络(MobileWirelessSensorNetwork,MWSN)的研究逐渐受到关注。在MWSN中,节点需要协同工作来完成任务,但在复杂环境中,移动障碍会对节点之间的协同通信和数据传输提出挑战。本文针对移动障碍的存在,研究了一种面向移动障碍的MWSN节点协同避障方法。首先,对移动障碍的运动行为进行建模,并在传感器

传感网络群移动节点协同避障方法研究.docx
传感网络群移动节点协同避障方法研究标题:传感网络群移动节点协同避障方法研究摘要:随着无线传感网络技术的不断发展,传感网络群中移动节点的协同工作对于实现高效、稳定的数据传输至关重要。然而,传感网络群在移动过程中面临各种障碍物的避让问题。本论文针对传感网络群移动节点的协同避障方法展开研究,通过分析相关论文和研究成果,提出了几种有效的协同避障方法,并分析了其优缺点,为传感网络群移动节点的协同避障提供了参考。1.引言随着无线传感技术的快速发展,传感网络应用越来越广泛,尤其是在各类监测、环境感知和救灾等领域,传感网
水面机器人协同障碍物检测及避障方法及系统.pdf
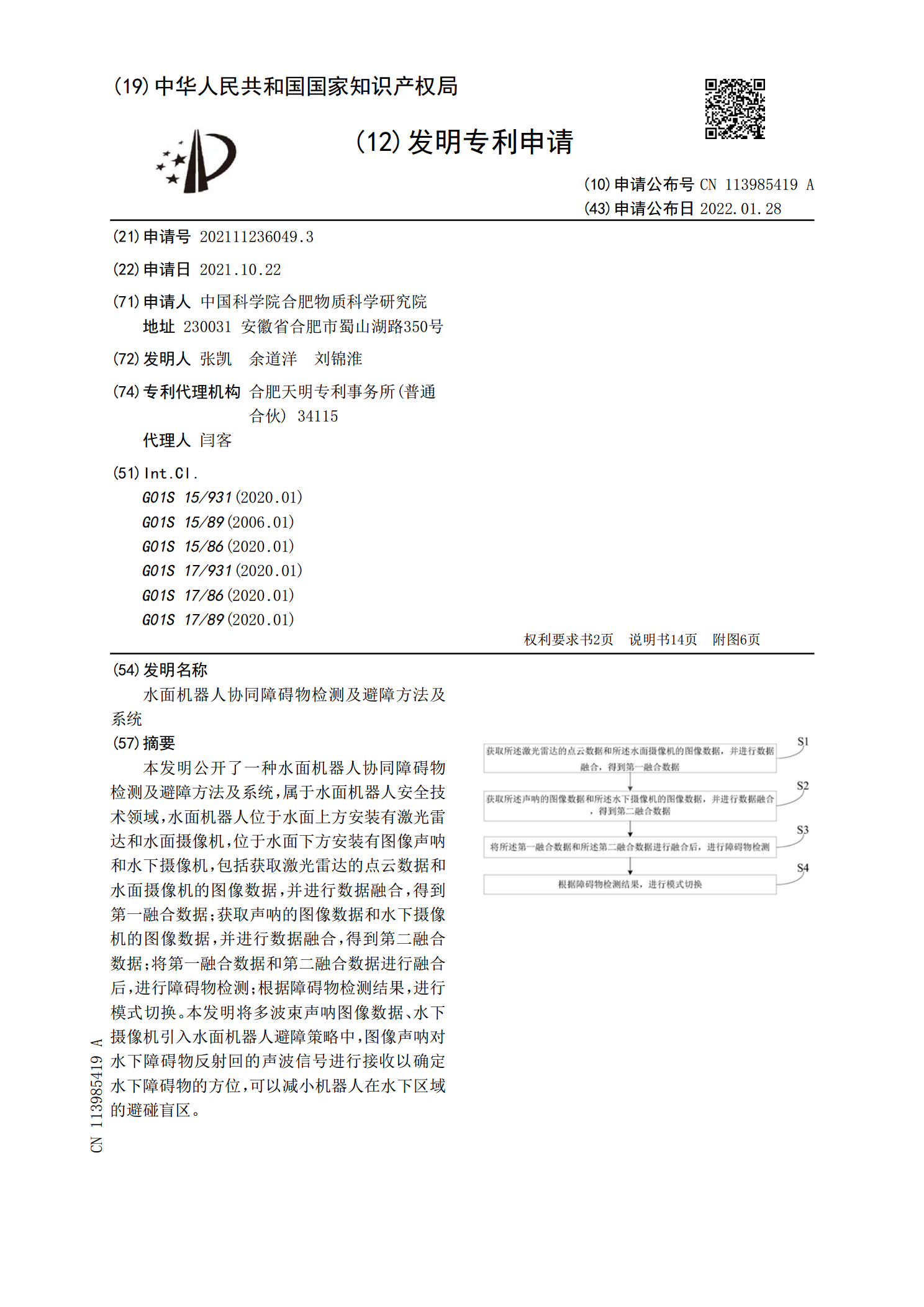
本发明公开了一种水面机器人协同障碍物检测及避障方法及系统,属于水面机器人安全技术领域,水面机器人位于水面上方安装有激光雷达和水面摄像机,位于水面下方安装有图像声呐和水下摄像机,包括获取激光雷达的点云数据和水面摄像机的图像数据,并进行数据融合,得到第一融合数据;获取声呐的图像数据和水下摄像机的图像数据,并进行数据融合,得到第二融合数据;将第一融合数据和第二融合数据进行融合后,进行障碍物检测;根据障碍物检测结果,进行模式切换。本发明将多波束声呐图像数据、水下摄像机引入水面机器人避障策略中,图像声呐对水下障碍物
自移动设备的避障方法、装置以及避障设备.pdf
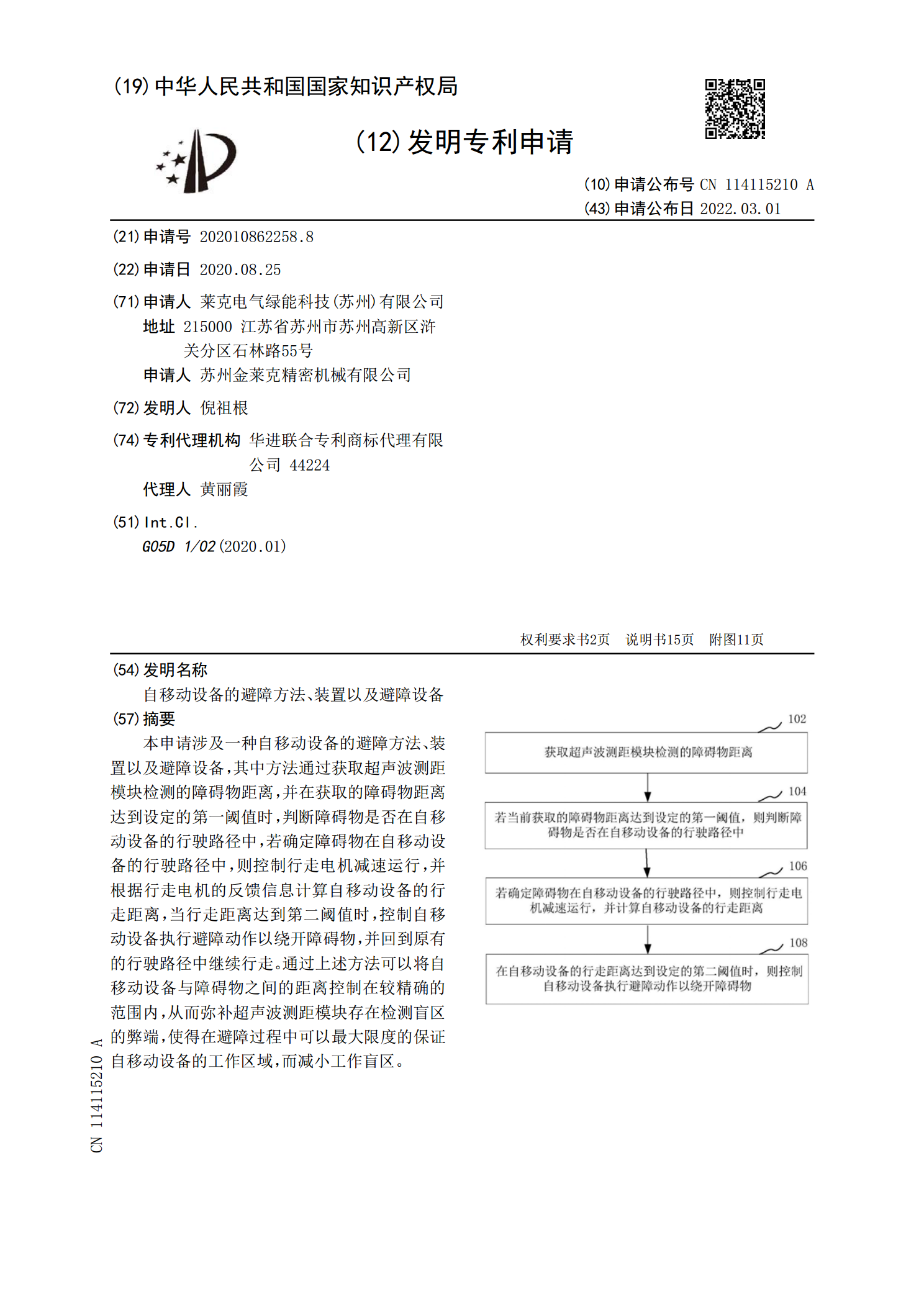
本申请涉及一种自移动设备的避障方法、装置以及避障设备,其中方法通过获取超声波测距模块检测的障碍物距离,并在获取的障碍物距离达到设定的第一阈值时,判断障碍物是否在自移动设备的行驶路径中,若确定障碍物在自移动设备的行驶路径中,则控制行走电机减速运行,并根据行走电机的反馈信息计算自移动设备的行走距离,当行走距离达到第二阈值时,控制自移动设备执行避障动作以绕开障碍物,并回到原有的行驶路径中继续行走。通过上述方法可以将自移动设备与障碍物之间的距离控制在较精确的范围内,从而弥补超声波测距模块存在检测盲区的弊端,使得在

未知环境下多AUV协同避障方法研究.docx
未知环境下多AUV协同避障方法研究摘要水下多智能无人机(AUV)在未知环境中协同避障一直是水下机器人领域面临的重要挑战之一。本文提出了一种基于机器学习的水下多AUV协同避障方法,该方法涵盖了从传感器数据到运动控制的全部流程。在该方法中,各个AUV通过协作学习和信息共享更新自身的位置与运动信息,并采用机器学习算法对周围环境进行感知和预测。最后,通过响应式规划器生成最优的运动轨迹,完成AUV的自主避障与区域探索任务。关键词:多智能无人机;协同避障;机器学习;水下机器人;自主探索1.引言近年来,水下机器人技术以