
一种欠驱动航天器三轴姿态稳定控制方法.pdf

雨巷****凝海


1/9

2/9

3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种欠驱动航天器三轴姿态稳定控制方法.pdf
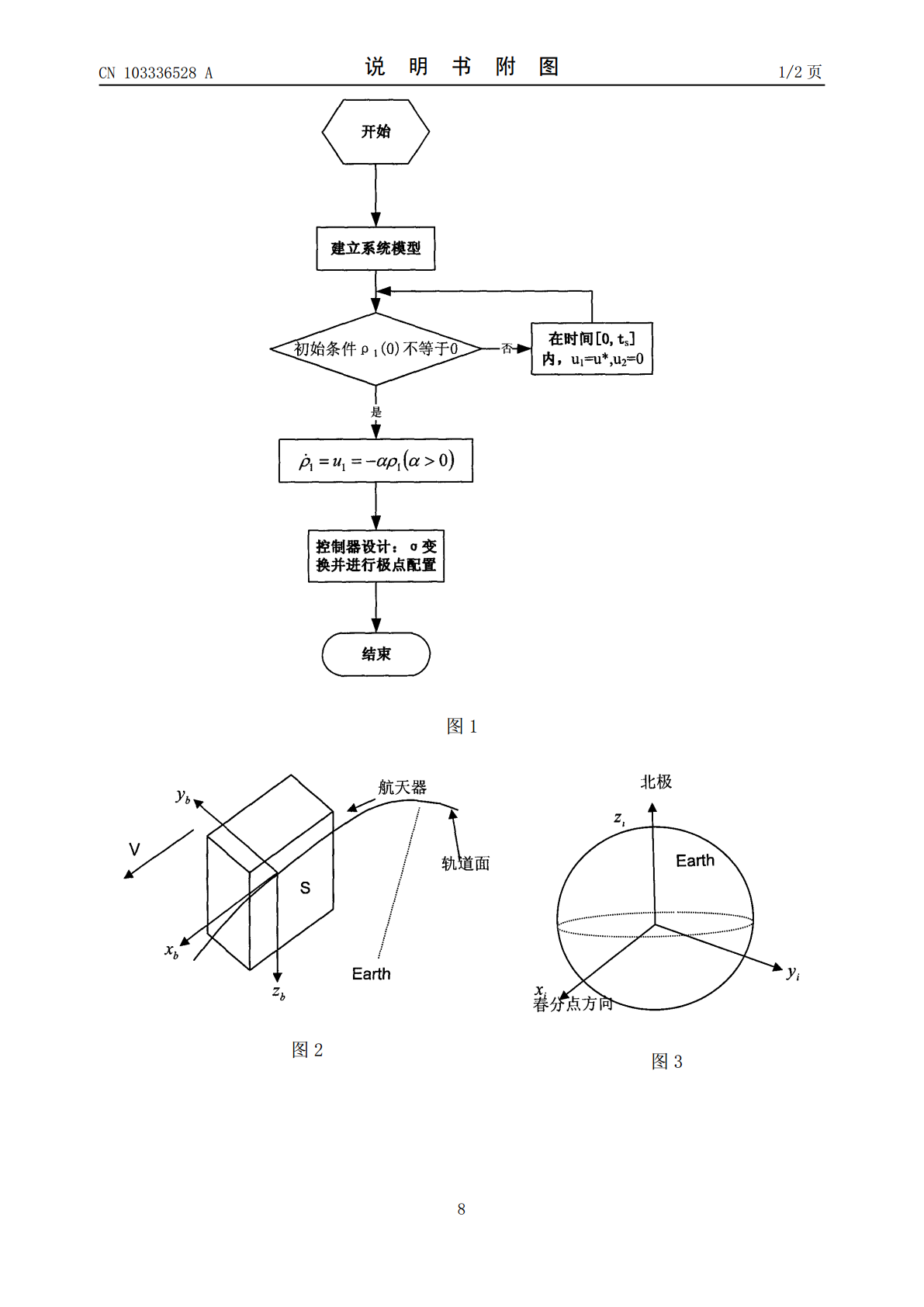
一种欠驱动航天器三轴姿态稳定控制方法,针对只能输出两轴控制力矩的欠驱动航天器,设计了通过两轴姿态控制飞轮实现三轴姿态稳定的控制器。建立基于罗德里格斯参数的姿态运动学方程、惯性系内的姿态动力学方程;将整个系统简化整理为一个Brockett双积分系统,采用σ变换根据初始条件是否为零,得到系统状态可控的线性控制系统,设计控制律完成系统的状态稳定,达到航天器三轴姿态稳定控制的目的。所提方法可实现欠驱动航天器只具有两轴姿态控制力矩输出能力时的三轴姿态稳定控制,相对于现有欠驱动控制方法,该设计方法简单直观,易于星上实
一种应用飞轮群的欠驱动航天器姿态控制方法.pdf
本发明涉及一种应用飞轮群的欠驱动航天器姿态控制方法,首先确定单个飞轮的角动量集合,再确定飞轮群角动量集合;计算飞轮群与航天器组成的整体系统的初始角动量幅值,并判定该初始角动量幅值是否满足条件;然后确定航天器姿态可机动集合,进而判定航天器能否实现姿态机动指令;确定航天器姿控系统最优控制性能指标,最后通过高斯伪谱法进行迭代计算,实现航天器的姿态机动控制。本发明给出了任意角动量条件下的航天器姿态可机动集合,解决了应用任意飞轮群剪刀对构型、任意系统初始角动量欠驱动航天器的姿态机动控制问题,从而推广了飞轮群在欠驱动
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法.pdf
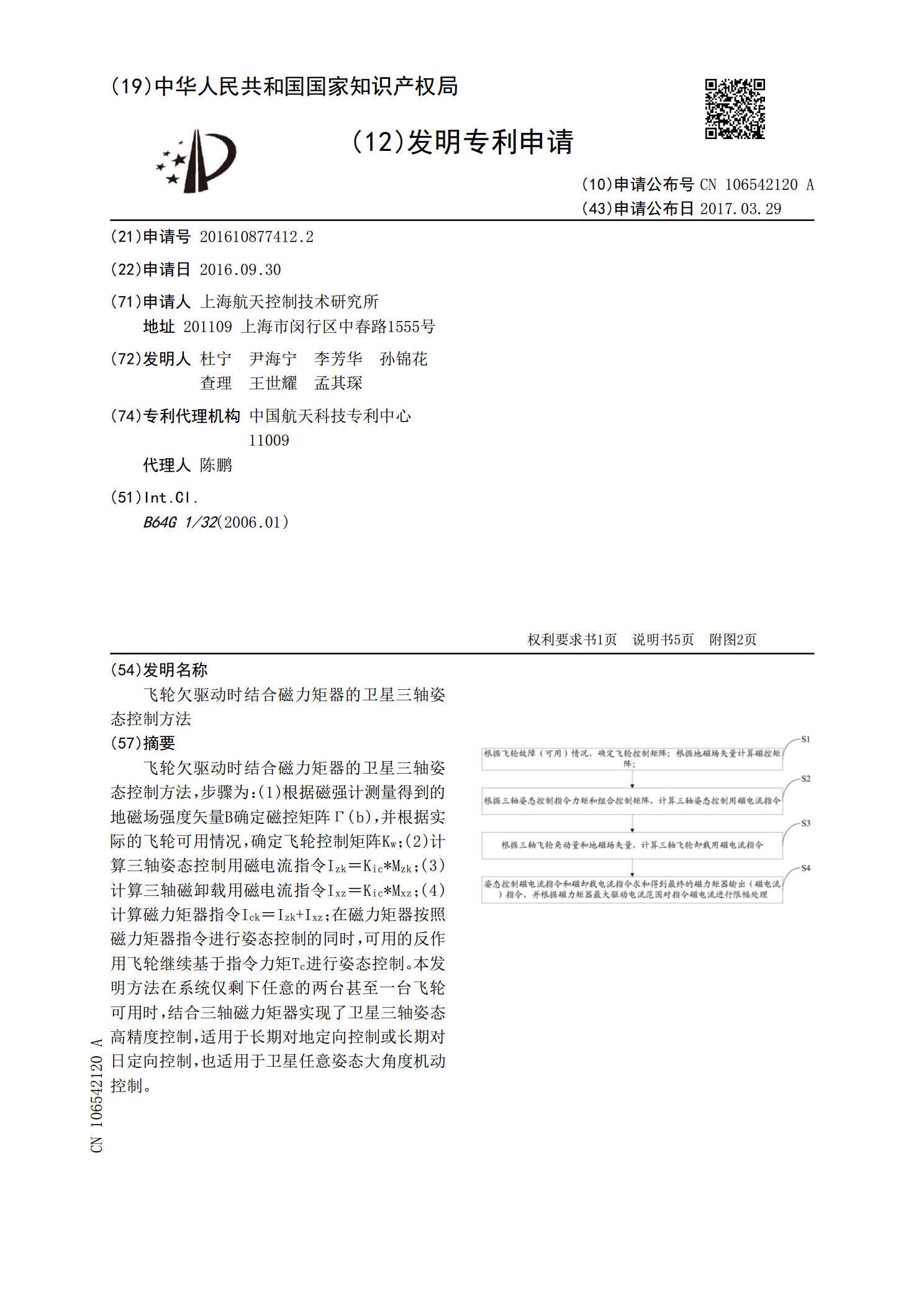
飞轮欠驱动时结合磁力矩器的卫星三轴姿态控制方法,步骤为:(1)根据磁强计测量得到的地磁场强度矢量B确定磁控矩阵Γ(b),并根据实际的飞轮可用情况,确定飞轮控制矩阵K
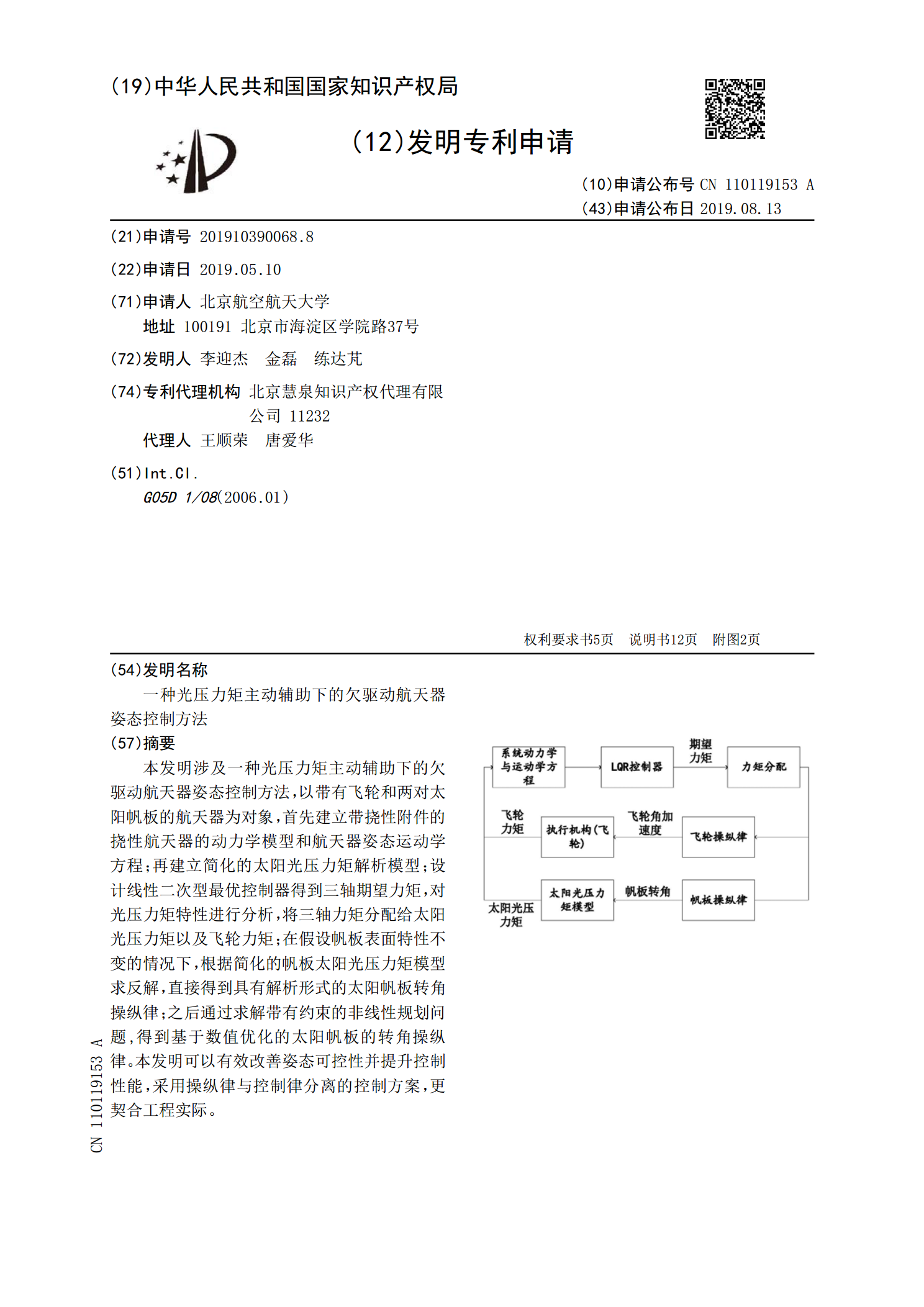
一种光压力矩主动辅助下的欠驱动航天器姿态控制方法.pdf
本发明涉及一种光压力矩主动辅助下的欠驱动航天器姿态控制方法,以带有飞轮和两对太阳帆板的航天器为对象,首先建立带挠性附件的挠性航天器的动力学模型和航天器姿态运动学方程;再建立简化的太阳光压力矩解析模型;设计线性二次型最优控制器得到三轴期望力矩,对光压力矩特性进行分析,将三轴力矩分配给太阳光压力矩以及飞轮力矩;在假设帆板表面特性不变的情况下,根据简化的帆板太阳光压力矩模型求反解,直接得到具有解析形式的太阳帆板转角操纵律;之后通过求解带有约束的非线性规划问题,得到基于数值优化的太阳帆板的转角操纵律。本发明可以有
一种三轴静不稳定飞翼无人机姿态角控制方法.pdf
本发明公开了一种三轴静不稳定飞翼无人机姿态角控制方法,包括以下步骤:1)使用增稳系统改善飞行器的静稳定性和动稳定性;2)在迎角与侧滑角增稳的基础上,设计飞翼无人机的姿态角控制回路;3)用极点配置的策略,确定迎角增稳的控制增益与俯仰角速率控制增益。本发明提供的控制方法飞翼无人机天然纵向力臂短的缺点,将纵向放宽静稳定性与飞翼无人机的有机结合,极大的发挥出飞翼无人机的优势,为后续飞翼无人机灵巧飞行、载荷提升等方面提供强有力的技术支撑;大大提高了飞翼无人机姿态角控制的抗扰能力,具有优良的鲁棒能力,可使飞翼布局无人