
用于控制电液制动系统的方法和设备.pdf

猫巷****傲柏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于控制电液式制动系统的方法和电液式制动系统.pdf
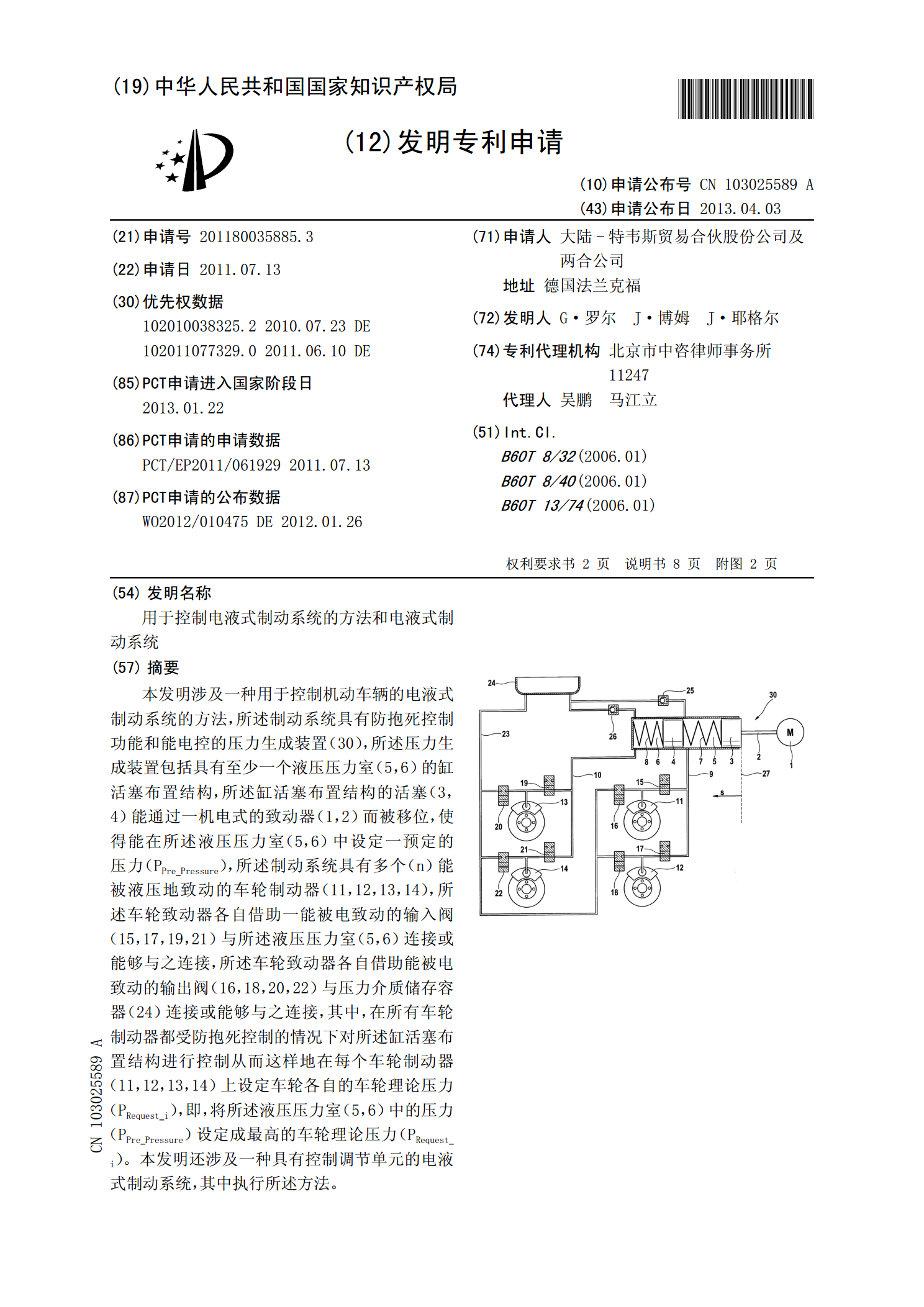
本发明涉及一种用于控制机动车辆的电液式制动系统的方法,所述制动系统具有防抱死控制功能和能电控的压力生成装置(30),所述压力生成装置包括具有至少一个液压压力室(5,6)的缸活塞布置结构,所述缸活塞布置结构的活塞(3,4)能通过一机电式的致动器(1,2)而被移位,使得能在所述液压压力室(5,6)中设定一预定的压力(PPre_Pressure),所述制动系统具有多个(n)能被液压地致动的车轮制动器(11,12,13,14),所述车轮致动器各自借助一能被电致动的输入阀(15,17,19,21)与所述液压压力室(

用于控制电液制动系统的方法和设备.pdf
本发明涉及一种用于控制机动车的电液制动系统的方法,所述制动系统具有至少一个能液压致动的轮制动器(9),所述轮制动器能借助于可电子控制的供压设备(16)致动,所述供压设备包括具有液压压力室(4)的缸活塞装置,所述缸活塞装置的活塞(3)能被机电的执行器(1)移动从而能在所述液压压力室(4)中设定出一可预先规定的压力理论值(PV,Soll),其中,确定出所述供压设备(30)的位置的执行器位置实际值(XAkt),其中,借助于一控制装置(40)产生一用于操控所述执行器(1)的控制参量(ωAkt,Soll,MAkt,
包括隔离回路的电液制动系统及控制电液制动系统的方法.pdf
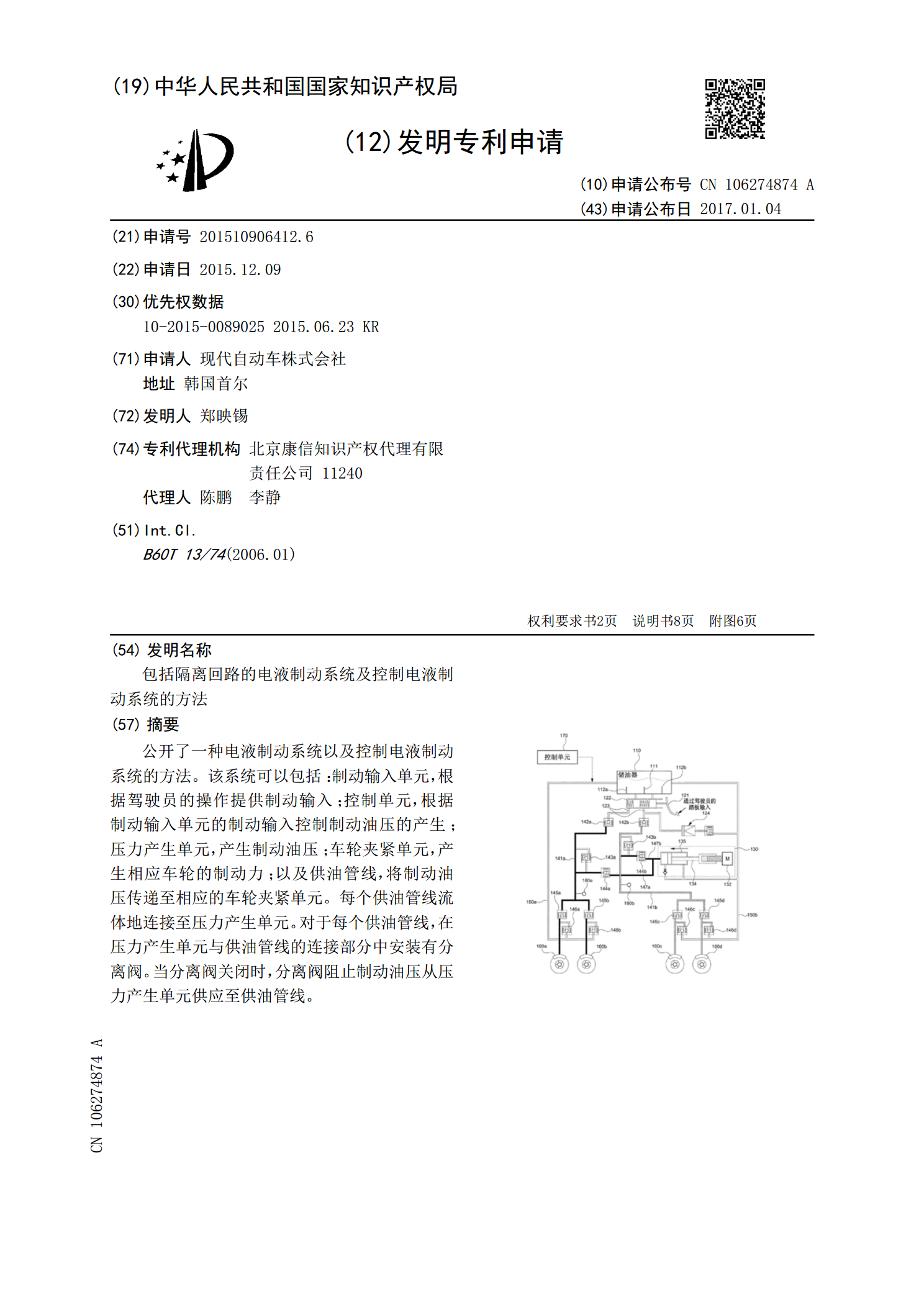
公开了一种电液制动系统以及控制电液制动系统的方法。该系统可以包括:制动输入单元,根据驾驶员的操作提供制动输入;控制单元,根据制动输入单元的制动输入控制制动油压的产生;压力产生单元,产生制动油压;车轮夹紧单元,产生相应车轮的制动力;以及供油管线,将制动油压传递至相应的车轮夹紧单元。每个供油管线流体地连接至压力产生单元。对于每个供油管线,在压力产生单元与供油管线的连接部分中安装有分离阀。当分离阀关闭时,分离阀阻止制动油压从压力产生单元供应至供油管线。

用于控制电液式机动车制动系统的方法和装置.pdf
本发明涉及一种用于控制电液式机动车制动系统的方法,制动系统具有至少一个制动压力调节或制动压力控制功能、特别是防抱死控制功能和另外的制动压力调节或制动压力控制功能,优选能在“线控制动”运行模式中被驱控。制动系统具有能借助于电子控制和调节单元驱控的供压装置(50),该供压装置与液压致动的车轮制动器(9)连接或能与之连接,并且借助于该供压装置能利用至少一个压力调节阀(6)液压致动车轮制动器(9)。供压装置包括带有液压压力腔(4)的缸-活塞组件,该缸-活塞组件的活塞(3)能通过机电式致动器(1,2)移动。对于每个
制动系统和用于控制制动系统的方法.pdf
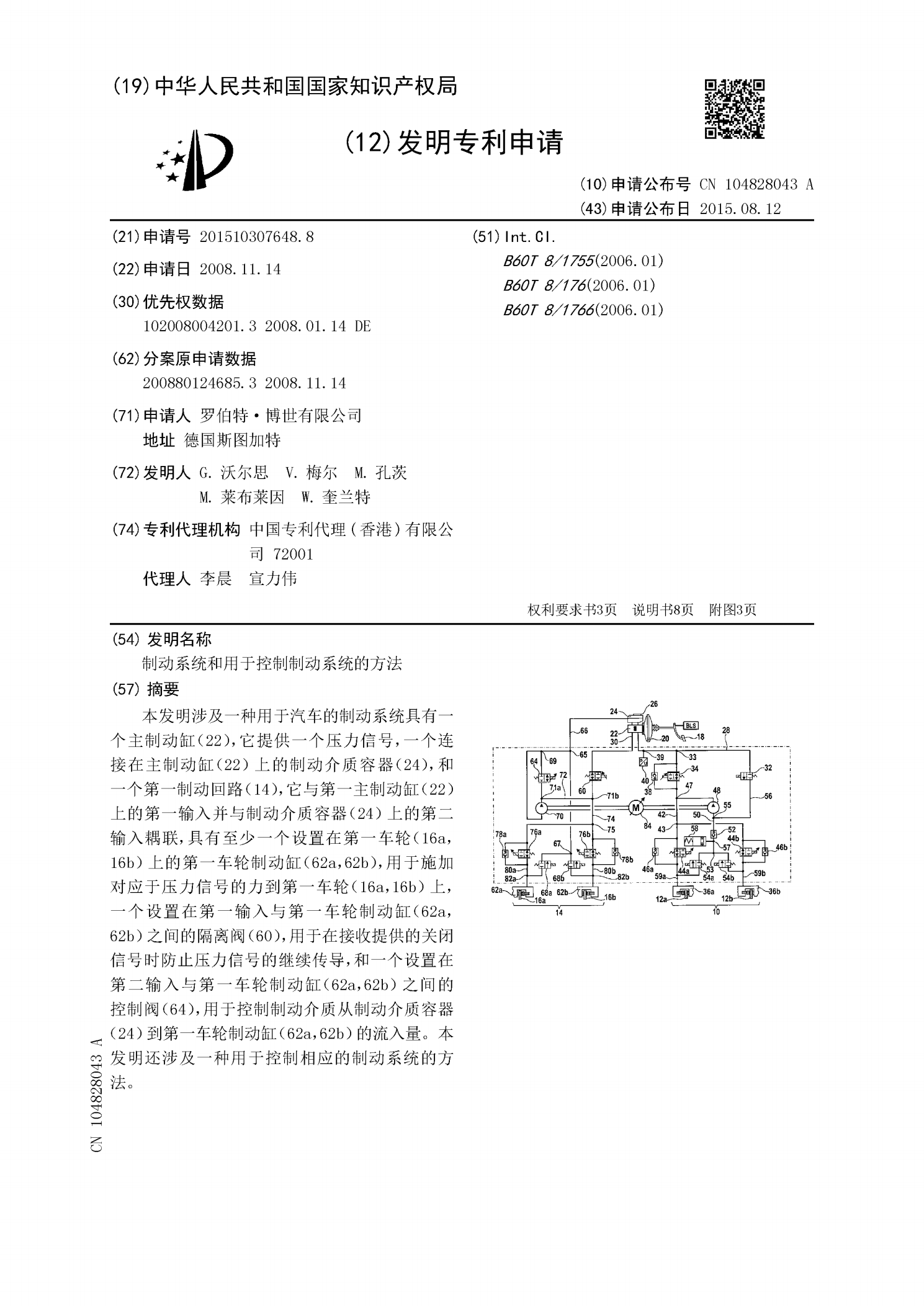
本发明涉及一种用于汽车的制动系统具有一个主制动缸(22),它提供一个压力信号,一个连接在主制动缸(22)上的制动介质容器(24),和一个第一制动回路(14),它与第一主制动缸(22)上的第一输入并与制动介质容器(24)上的第二输入耦联,具有至少一个设置在第一车轮(16a,16b)上的第一车轮制动缸(62a,62b),用于施加对应于压力信号的力到第一车轮(16a,16b)上,一个设置在第一输入与第一车轮制动缸(62a,62b)之间的隔离阀(60),用于在接收提供的关闭信号时防止压力信号的继续传导,和一个设置