
控制系统的校正方法.ppt

YY****。。


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共91页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

控制系统的校正方法.ppt
第6章控制系统的综合与校正6.1系统的设计与校正问题校正问题:系统的基本组成部分(被控对象、测量元件、功率放大元件、执行元件等),按照反馈控制原理可联成基本控制系统。但往往难以满足性能要求,需要在系统原有结构上加入新的附加环节,作为同时改善系统稳态性能和动态性能的手段。系统的校正(设计):在不改变系统基本部件的前提下,选择合适的校正装置,确定参数、满足各项性能要求。性能指标是用于衡量系统具体性能(平稳性、快速性、准确性)的参数,主要分为稳态性能指标与动态性能指标两大类。分为三类,常用的性能指标主要有:1)

控制系统校正的根轨迹方法.docx
控制系统校正的根轨迹方法用根轨迹法进行校正的基础,是通过在系统开环传递函数中增加零点和极点以改变根轨迹的形状,从而使系统根轨迹在S平面上通过希望的闭环极点。根轨迹法校正的特征是基于闭环系统具有一对主导闭环极点,当然,零点和附加的极点会影响响应特性。应用根轨迹进行校正,实质上是通过采用校正装置改变根轨迹的,从而将一对主导闭环极点配置到期望的位置上。在开环传递函数中增加极点,可以使根轨迹向右方移动,从而降低系统的相对稳定性,增大系统调节时间。等同于积分控制,相当于给系统增加了位于原点的极点,因此降低了系统的稳

控制系统的校正方法培训课件.pptx
第六章控制系统旳校正措施§6.1系统校正基础2、动态性能指标(1)时域动态性能指标延迟时间td上升时间tr峰值时间tp超调量Mp调整时间ts振荡次数N(2)频域动态性能指标开环频域指标:开环增益Ko低频段斜率开环截止频率c中频段斜率c中频段宽度h幅值裕度Lg相位裕度c高频衰减率h闭环频域指标:闭环谐振峰值Mr闭环谐振频率r闭环频带宽度b(3)时域性能指标和频域性能指标旳关系二、校正构造重要有:串联校正与并联校正等效开环传递函数优、缺陷装置简朴高敏捷度调整灵活高稳定度成本低§6.2根轨迹法校正

离散控制系统根迹校正的简化方法.docx
离散控制系统根迹校正的简化方法离散控制系统根迹校正的简化方法摘要:离散控制系统根迹校正是控制系统中一项重要的技术手段,可以有效地使系统的动态性能达到设计要求。然而,传统的根迹校正方法中,系统根轨迹的绘制需要手工计算和绘制,这不仅耗时耗力,而且容易出错。因此,为了简化根轨迹校正的过程,本文从简化系统模型、自动计算根轨迹和自动校正参数等方面进行了探讨和研究,并提出了一种基于计算机辅助设计技术的简化方法。关键词:离散控制系统;根轨迹校正;简化方法;系统模型;自动计算;自动校正一、引言离散控制系统是现代工业中重要
重叠校正方法和使用该方法的控制系统.pdf
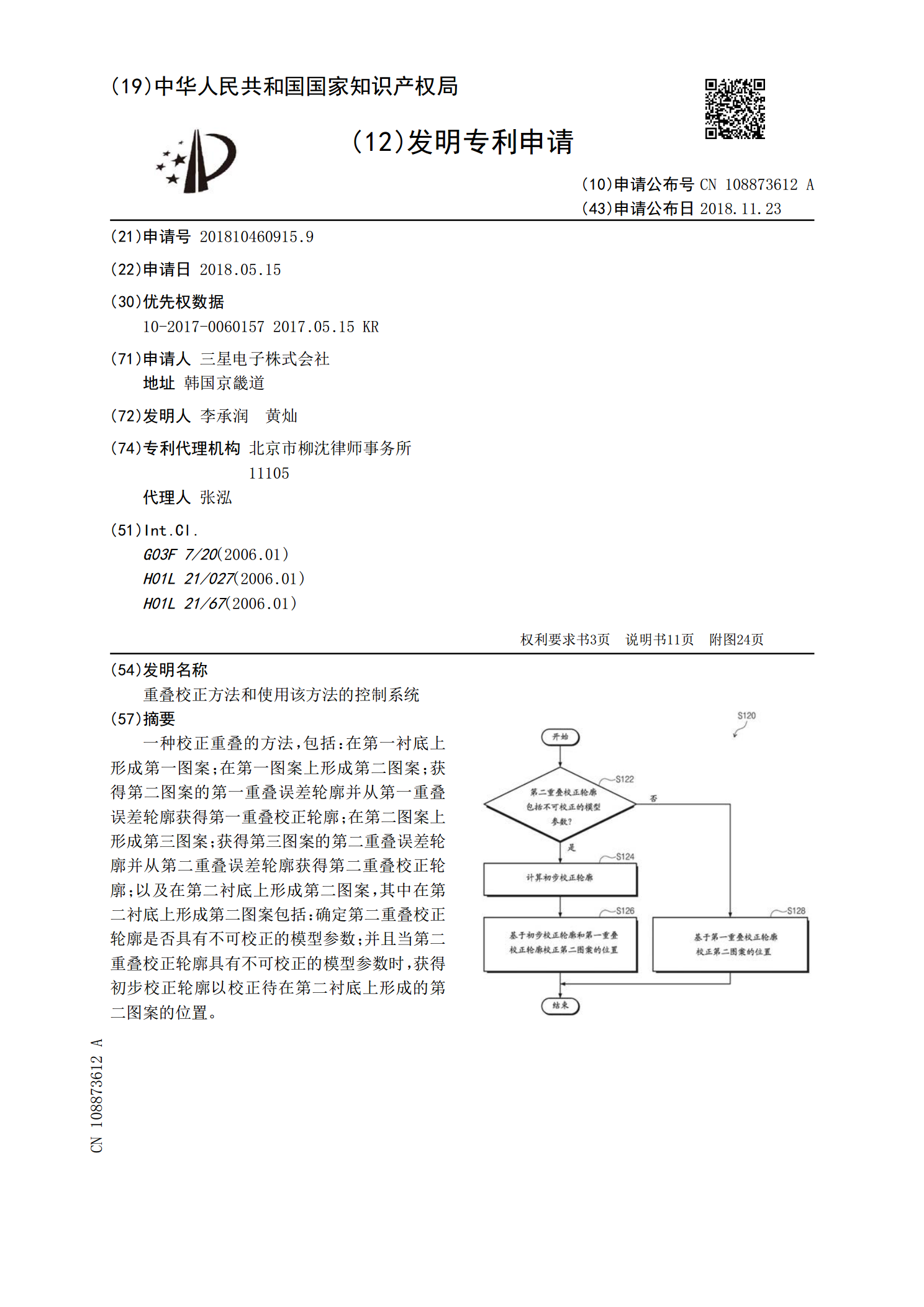
一种校正重叠的方法,包括:在第一衬底上形成第一图案;在第一图案上形成第二图案;获得第二图案的第一重叠误差轮廓并从第一重叠误差轮廓获得第一重叠校正轮廓;在第二图案上形成第三图案;获得第三图案的第二重叠误差轮廓并从第二重叠误差轮廓获得第二重叠校正轮廓;以及在第二衬底上形成第二图案,其中在第二衬底上形成第二图案包括:确定第二重叠校正轮廓是否具有不可校正的模型参数;并且当第二重叠校正轮廓具有不可校正的模型参数时,获得初步校正轮廓以校正待在第二衬底上形成的第二图案的位置。