
基于分布式BLUE的多雷达数据融合方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于分布式BLUE的多雷达数据融合方法.docx
基于分布式BLUE的多雷达数据融合方法基于分布式BLUE的多雷达数据融合方法摘要:多雷达数据融合是一种有效的方法,可以提高雷达系统的检测和跟踪能力。本文提出一种基于分布式BLUE的多雷达数据融合方法,该方法通过将多个雷达节点间的观测数据进行融合,实现对目标的更准确的检测和跟踪。首先,介绍了分布式BLUE算法的基本原理和流程;然后,详细描述了基于分布式BLUE的多雷达数据融合方法的具体步骤;接着,通过仿真实验验证了该方法的有效性和性能优势;最后,总结了本文的工作,并对未来的研究方向进行展望。关键词:多雷达数
基于多域多层数据融合的雷达性能动态评估方法.pdf
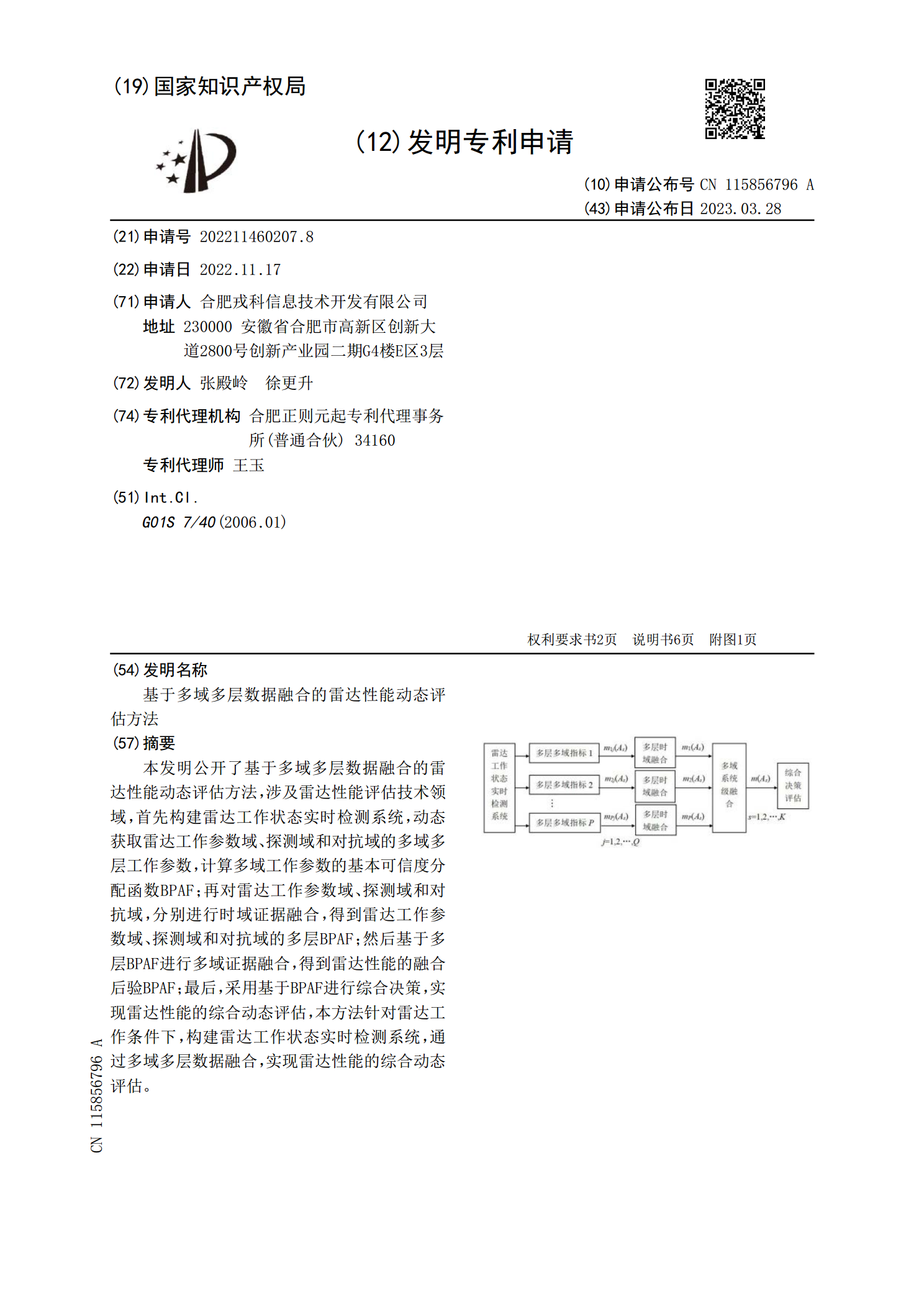
本发明公开了基于多域多层数据融合的雷达性能动态评估方法,涉及雷达性能评估技术领域,首先构建雷达工作状态实时检测系统,动态获取雷达工作参数域、探测域和对抗域的多域多层工作参数,计算多域工作参数的基本可信度分配函数BPAF;再对雷达工作参数域、探测域和对抗域,分别进行时域证据融合,得到雷达工作参数域、探测域和对抗域的多层BPAF;然后基于多层BPAF进行多域证据融合,得到雷达性能的融合后验BPAF;最后,采用基于BPAF进行综合决策,实现雷达性能的综合动态评估,本方法针对雷达工作条件下,构建雷达工作状态实时检
多雷达数据融合方法、装置、存储介质和设备.pdf
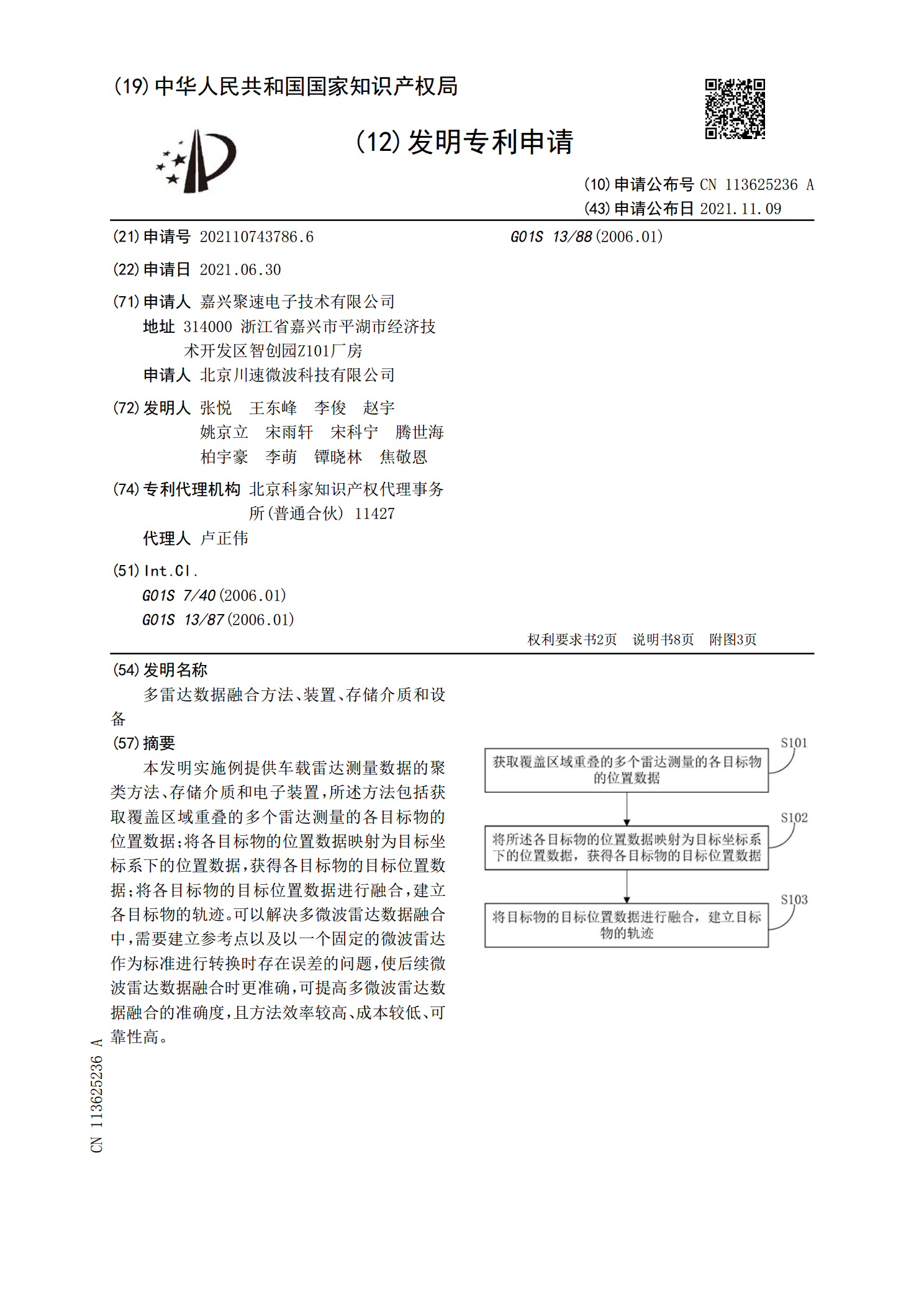
本发明实施例提供车载雷达测量数据的聚类方法、存储介质和电子装置,所述方法包括获取覆盖区域重叠的多个雷达测量的各目标物的位置数据;将各目标物的位置数据映射为目标坐标系下的位置数据,获得各目标物的目标位置数据;将各目标物的目标位置数据进行融合,建立各目标物的轨迹。可以解决多微波雷达数据融合中,需要建立参考点以及以一个固定的微波雷达作为标准进行转换时存在误差的问题,使后续微波雷达数据融合时更准确,可提高多微波雷达数据融合的准确度,且方法效率较高、成本较低、可靠性高。

基于数据关联的多雷达点迹融合算法研究.pptx
基于数据关联的多雷达点迹融合算法研究01添加章节标题数据关联算法算法原理算法流程算法优化算法应用多雷达点迹融合算法算法概述融合策略融合效果评估算法优缺点多雷达点迹融合算法的实现实现流程实现细节实现效果实现工具与环境算法性能评估评估方法评估结果结果分析结果应用算法改进与优化算法优化方向优化方法与步骤优化效果评估优化后算法的应用前景感谢观看

基于纹理的雷达与多光谱遥感数据小波融合研究.docx
基于纹理的雷达与多光谱遥感数据小波融合研究随着遥感技术的不断发展和应用,纹理特征和多光谱信息成为了遥感数据中的重要特征。为了提高对地表覆盖信息的识别和分类精度,对这两种数据进行融合已成为目前研究的重点。本文主要基于纹理的雷达和多光谱遥感数据小波融合研究。一、研究目的本研究旨在通过对基于纹理的雷达与多光谱遥感数据进行小波融合来提高对地表覆盖信息的精确度。通过比较分析单独应用基于纹理的雷达数据和多光谱数据与应用小波融合后的数据分类效果,以验证小波融合方法的有效性,并探究其适用范围和局限性。二、研究内容1.基于