
匹配场处理分布式多阵水下目标三维定位方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

匹配场处理分布式多阵水下目标三维定位方法.docx
匹配场处理分布式多阵水下目标三维定位方法匹配场处理分布式多阵水下目标三维定位方法摘要:随着水下目标探测与定位技术的发展,为了提高水下目标的定位精度和准确度,匹配场成为一种被广泛研究和应用的方法。本文将介绍匹配场处理分布式多阵水下目标三维定位方法的原理、算法和实验结果。通过实验数据和分析,验证了该方法在水下目标定位方面的优越性和可行性。1.引言水下目标的定位是水下勘探和海洋工程领域中的重要研究方向。传统的水下目标定位方法往往受到水下环境复杂性的限制,如水质、海流等因素对声波传播的影响。因此,研究人员提出了各

应用匹配场实现矢量水平阵的三维定位.docx
应用匹配场实现矢量水平阵的三维定位矢量水平阵的三维定位是一种基于场景匹配的定位方法,在很多实际应用中具有重要意义。本论文旨在探讨矢量水平阵的三维定位技术的原理、算法及应用,并分析其在实际场景中的优势和挑战。一、引言现代社会对定位技术的需求越来越高,矢量水平阵的三维定位作为一种新的定位方法,引起了广泛的关注。该方法通过使用多个传感器构成的矢量水平阵,通过匹配场实现对目标物体的三维定位。与传统的单一传感器定位方法相比,矢量水平阵的三维定位具有更高的定位精度和更强的抗干扰能力。二、矢量水平阵的三维定位原理矢量水
一种垂直矢量阵水下声线匹配被动定位方法.pdf
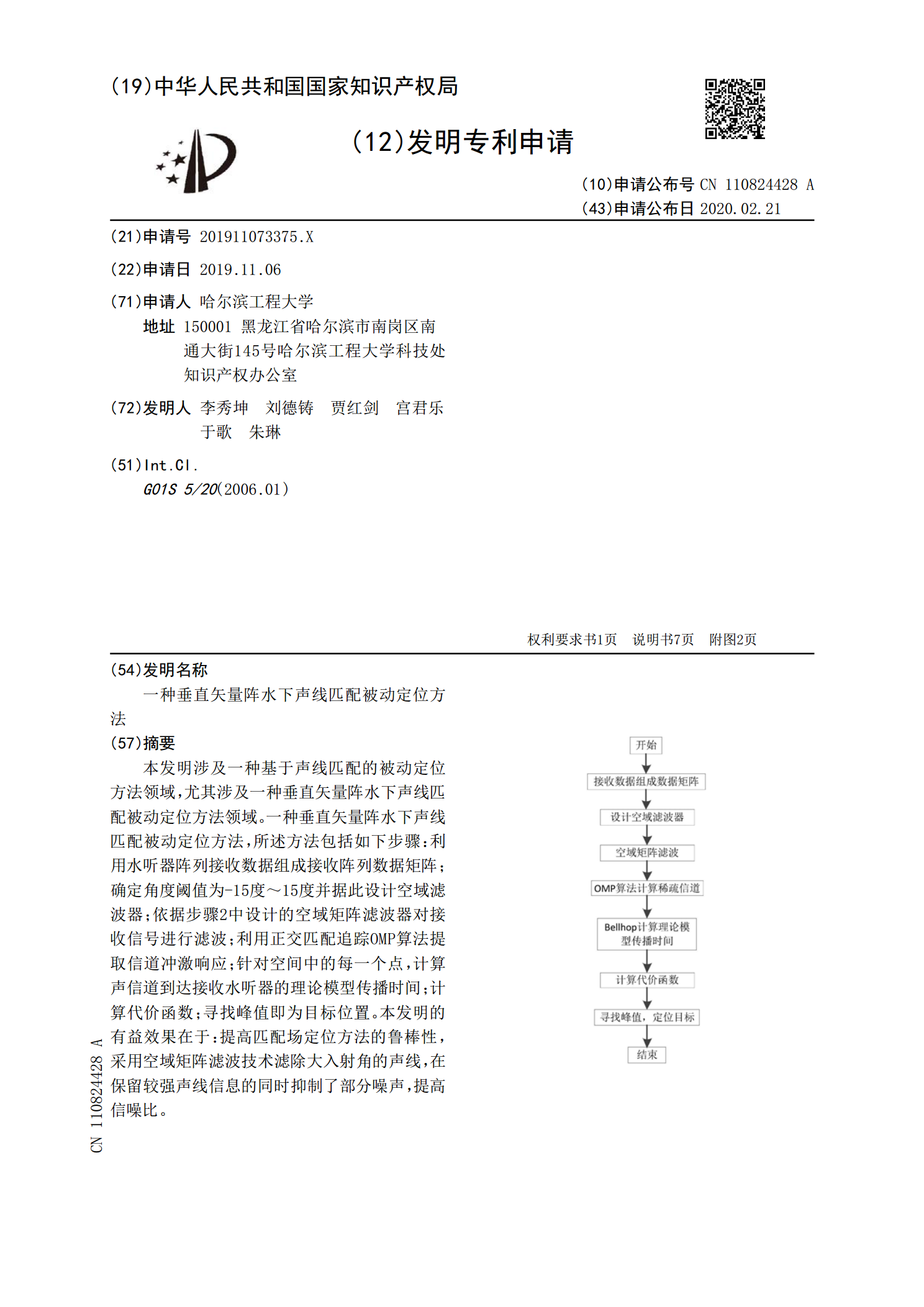
本发明涉及一种基于声线匹配的被动定位方法领域,尤其涉及一种垂直矢量阵水下声线匹配被动定位方法领域。一种垂直矢量阵水下声线匹配被动定位方法,所述方法包括如下步骤:利用水听器阵列接收数据组成接收阵列数据矩阵;确定角度阈值为‑15度~15度并据此设计空域滤波器;依据步骤2中设计的空域矩阵滤波器对接收信号进行滤波;利用正交匹配追踪OMP算法提取信道冲激响应;针对空间中的每一个点,计算声信道到达接收水听器的理论模型传播时间;计算代价函数;寻找峰值即为目标位置。本发明的有益效果在于:提高匹配场定位方法的鲁棒性,采用空

单基阵三维纯方位水下信标声学定位方法.pptx
单基阵三维纯方位水下信标声学定位方法01添加章节标题单基阵原理声学定位原理单基阵与多基阵的区别单基阵的优势定位精度与误差分析三维纯方位水下信标系统系统组成与工作原理信标接收器设计信号处理算法定位解算方法声学信号处理技术信号采集与传输信号去噪与增强信号特征提取信号分类与识别实验验证与分析实验设置与数据采集实验结果展示与分析性能评估与对比分析误差来源与改进措施应用前景与发展趋势在水下定位领域的应用前景在其他领域的应用可能性技术发展趋势与展望感谢观看

一种水下三维地形匹配定位导航声呐及导航方法.pdf
本发明公开了一种水下三维地形匹配定位导航声呐,包括控制系统、数据采集处理系统、多通道接收机、多通道稀疏平行接收线阵、多通道信号源、多通道发射机和多通道发射基阵;控制系统的输出端双向连接数据采集处理系统的输入端,数据采集处理系统的输出端分别连接多通道接收机和多通道信号源的输入端,解决了传统声呐地形探测效率低、信息量少、地形匹配的效率与准确率低、无法修正惯导和多普勒计程仪的累计误差,无法提高地形匹配定位导航算法的鲁棒性的问题。