
单基阵三维纯方位水下信标声学定位方法.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单基阵三维纯方位水下信标声学定位方法.pptx
单基阵三维纯方位水下信标声学定位方法01添加章节标题单基阵原理声学定位原理单基阵与多基阵的区别单基阵的优势定位精度与误差分析三维纯方位水下信标系统系统组成与工作原理信标接收器设计信号处理算法定位解算方法声学信号处理技术信号采集与传输信号去噪与增强信号特征提取信号分类与识别实验验证与分析实验设置与数据采集实验结果展示与分析性能评估与对比分析误差来源与改进措施应用前景与发展趋势在水下定位领域的应用前景在其他领域的应用可能性技术发展趋势与展望感谢观看

单基阵纯方位水下目标运动分析技术研究的任务书.docx
单基阵纯方位水下目标运动分析技术研究的任务书任务书一、研究背景随着经济的发展和水下技术的不断提高,水下目标在航海、水利、军事等领域的应用越来越广泛。目前水下目标的运动分析技术是解决水下物体形态、构造、成分和运动状态等问题的关键技术之一。其中,单基阵纯方位(purebearing)水下目标运动分析技术是一种基于声信号的运动测量方法,具有较高的测量精度和不受目标距离影响等优点,在军事、海洋、能源等领域中有广泛的应用价值。因此,本研究将重点对单基阵纯方位水下目标运动分析技术进行研究探讨。二、研究内容1.单基阵纯

基于浮-信标网络的水下声学定位关键技术研究.docx
基于浮-信标网络的水下声学定位关键技术研究水下声学定位是水下运动目标在水下环境中进行导航、定位的关键技术之一。随着水下机器人、水下潜水器、潜水员等水下工具的广泛应用,高精度定位问题已经成为水下工程领域中的重要问题。浮-信标网络技术是近年来广泛使用的一种水下定位技术,其基本原理是通过在海底和水面上部署一定数量的浮标和信标,利用声波在水下传播的性质进行测距定位和导航。一、浮-信标网络的基本原理浮-信标网络主要由水面浮标、水下信标、海底浮标、接收机等组成。水面浮标和海底浮标之间通过光缆相互连接,水下信标则通过声
信标漂移情况下水下WSN节点三维定位方法.pdf
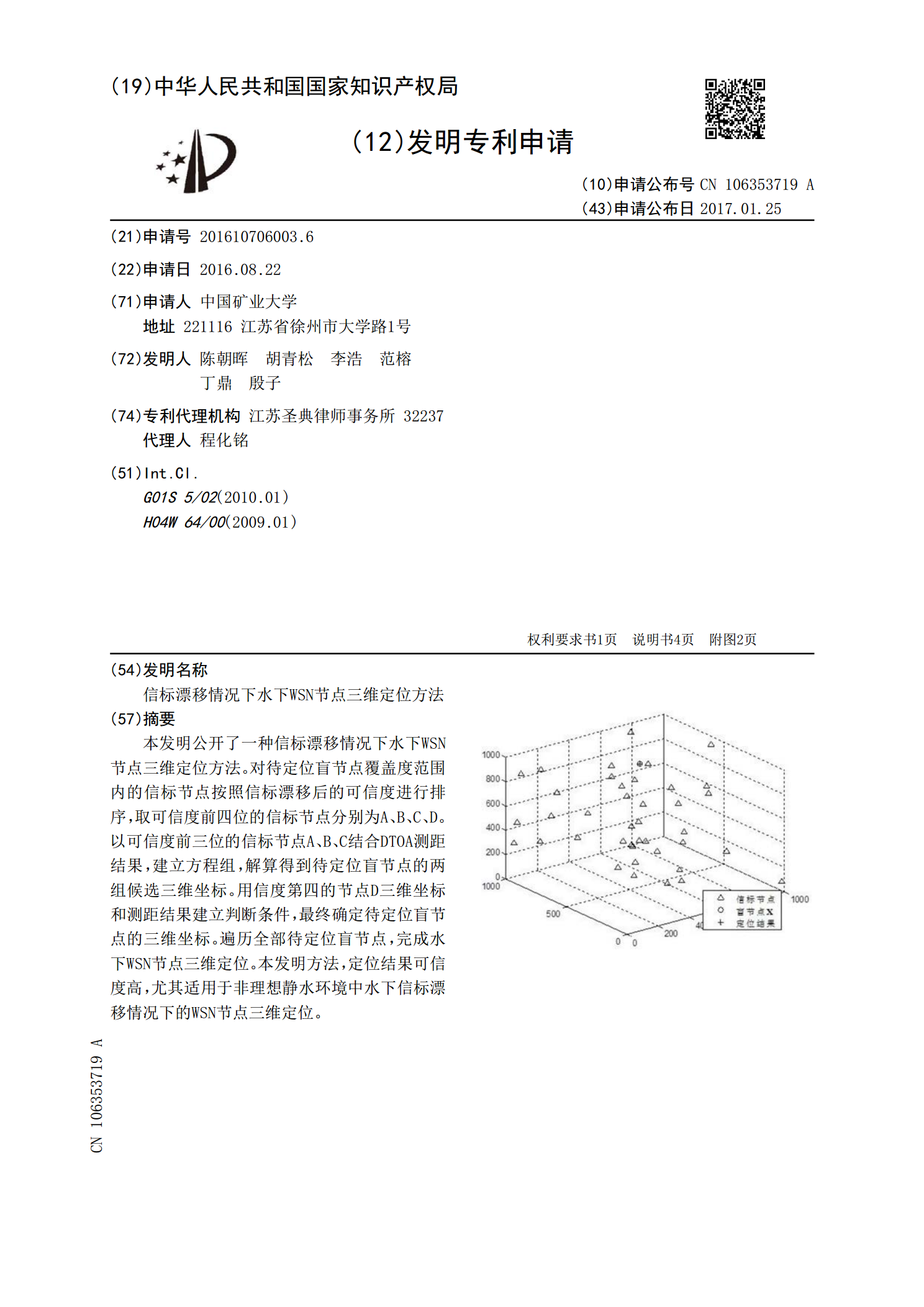
本发明公开了一种信标漂移情况下水下WSN节点三维定位方法。对待定位盲节点覆盖度范围内的信标节点按照信标漂移后的可信度进行排序,取可信度前四位的信标节点分别为A、B、C、D。以可信度前三位的信标节点A、B、C结合DTOA测距结果,建立方程组,解算得到待定位盲节点的两组候选三维坐标。用信度第四的节点D三维坐标和测距结果建立判断条件,最终确定待定位盲节点的三维坐标。遍历全部待定位盲节点,完成水下WSN节点三维定位。本发明方法,定位结果可信度高,尤其适用于非理想静水环境中水下信标漂移情况下的WSN节点三维定位。

一种水下航行器的水下信标定位方法.pdf
本发明属于水下定位技术领域,特别涉及一种水下航行器的定位方法。水声信标周期性广播水声信号;水下航行器在未接收到水声信号时,通过自身配备的电子罗盘、深度计以及读取自身的螺旋桨转速信息进行航位推算,并在接收到所搭载的多普勒测速仪测得的的绝对速度观测后,构造海流速度观测量并通过Kalman滤波进行海流速度校正;水下航行器接收到水声信号后,考虑水下声速的未知性、水声信标位置误差及水声信号收发端的时钟漂移,以此基于扩展Kalman滤波算法及期望最大化算法,以水声信号传递时间为观测变量,进行水下航行器的位置更新。本发