
一种仿人形无轨自动送餐机器人.pdf

雅云****彩妍

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种仿人形无轨自动送餐机器人.pdf
本发明公开了一种仿人形无轨自动送餐机器人,动力底座包括三层支撑板、二层支撑板和底盘,所述底盘上设有伺服电机,伺服电机的一侧设有驱动轮,二层支撑板上设有伺服驱动器,所述底盘内设有避障传感器,所述动力底座上还设有保险和主控制板,保险连接继电器,继电器进一步和空气开关连接,所述机器人外壳主体两侧设有手臂,托盘设置于手臂上,所述机器人外壳主体背部设有电源开关、急停开关、光电传感器和触摸屏,机器人外壳主体上部设有传感器,提供一种仿人形无轨自动送餐机器人,地板上无需粘贴磁条或光感胶条,也能达到机器人正常行走的功能,不

一种仿人形无轨自动送餐机器人.pdf
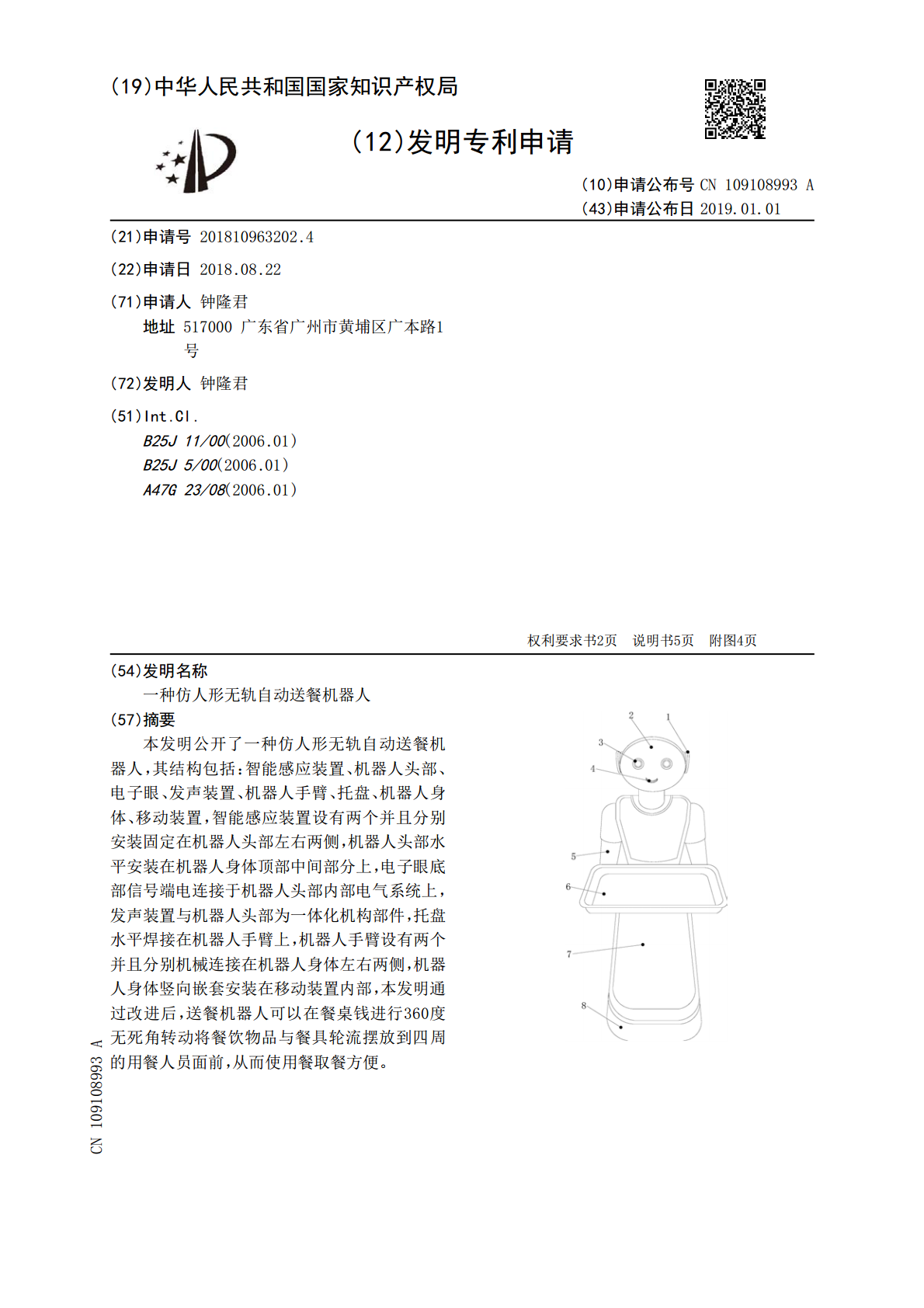
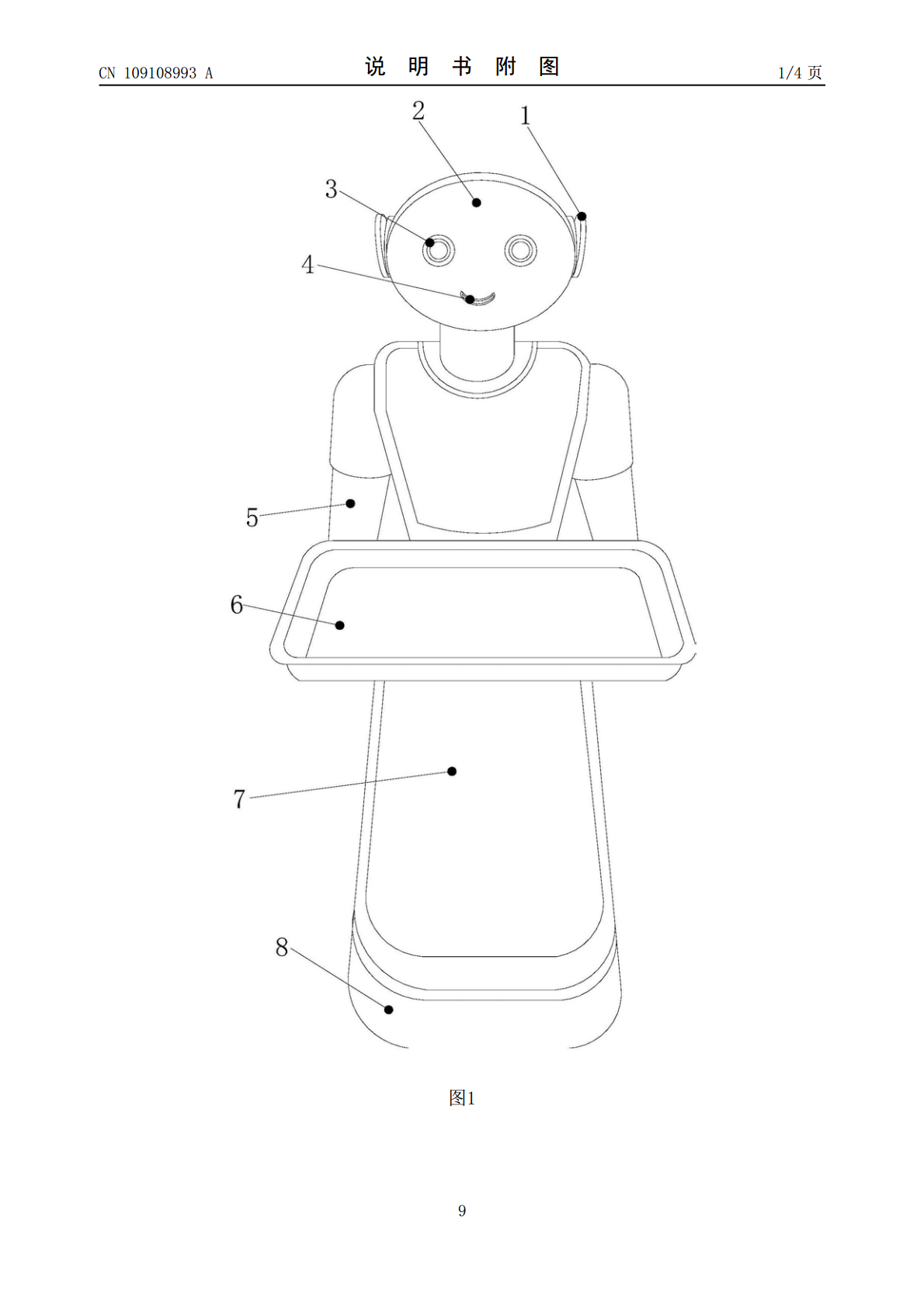
本发明公开了一种仿人形无轨自动送餐机器人,其结构包括:智能感应装置、机器人头部、电子眼、发声装置、机器人手臂、托盘、机器人身体、移动装置,智能感应装置设有两个并且分别安装固定在机器人头部左右两侧,机器人头部水平安装在机器人身体顶部中间部分上,电子眼底部信号端电连接于机器人头部内部电气系统上,发声装置与机器人头部为一体化机构部件,托盘水平焊接在机器人手臂上,机器人手臂设有两个并且分别机械连接在机器人身体左右两侧,机器人身体竖向嵌套安装在移动装置内部,本发明通过改进后,送餐机器人可以在餐桌钱进行360度无死角

一种自动烹饪送餐机器人.pdf
本发明公开了一种自动烹饪送餐机器人,包括自动烹饪机器人以及自动送餐机器人,所述自动烹饪机器人包括灶台、若干电磁炉、若干锅、若干吸油烟装置、翻锅装置、翻炒装置、加料通道、储料箱、烹饪板、烹饪板自动出料机构、成菜输送装置以及第一控制装置;所述自动送餐机器人包括车体、储菜箱体、升降机构、保温装置、端菜机构、避障传感器、定位传感器、移动电源以及第二控制装置,所述第一控制装置与所述第二控制装置无线连接。该自动烹饪送餐机器人只要在使用之前将菜洗净切好、将调料装入到对应的储料通道内,可以根据设定的程序操控进行炒制送菜,
一种餐厅自动烹饪送餐机器人.pdf
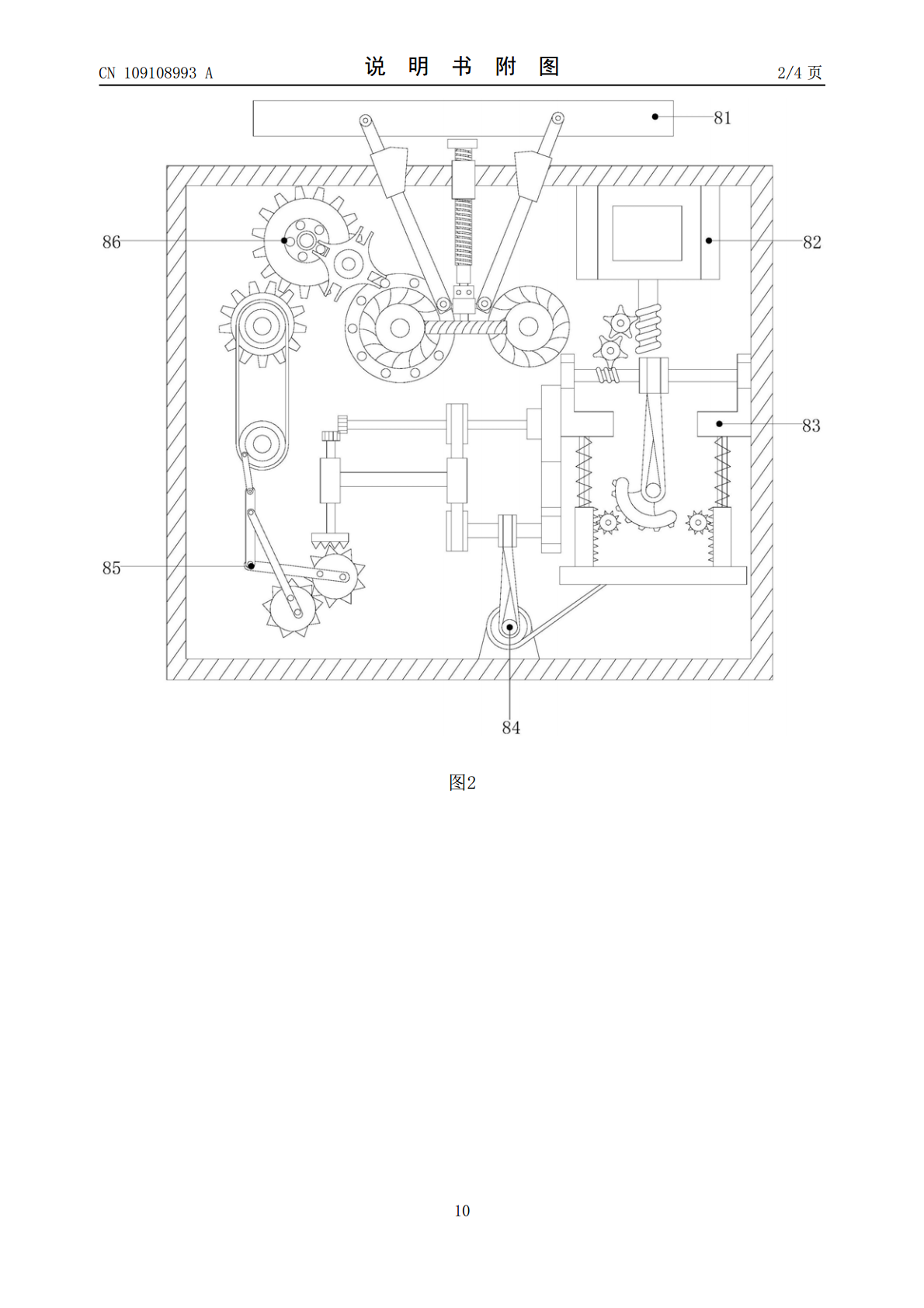
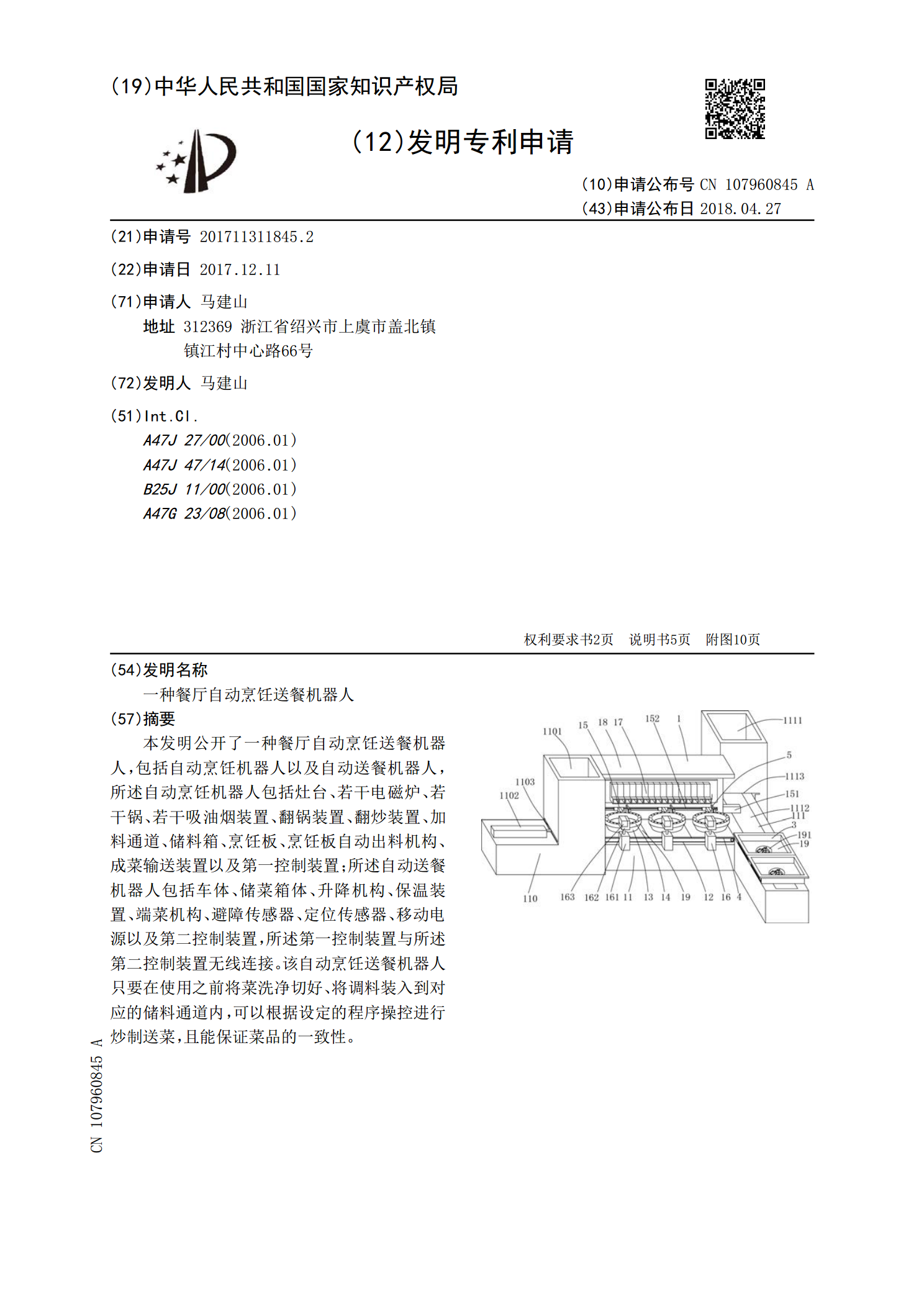
本发明公开了一种餐厅自动烹饪送餐机器人,包括自动烹饪机器人以及自动送餐机器人,所述自动烹饪机器人包括灶台、若干电磁炉、若干锅、若干吸油烟装置、翻锅装置、翻炒装置、加料通道、储料箱、烹饪板、烹饪板自动出料机构、成菜输送装置以及第一控制装置;所述自动送餐机器人包括车体、储菜箱体、升降机构、保温装置、端菜机构、避障传感器、定位传感器、移动电源以及第二控制装置,所述第一控制装置与所述第二控制装置无线连接。该自动烹饪送餐机器人只要在使用之前将菜洗净切好、将调料装入到对应的储料通道内,可以根据设定的程序操控进行炒制送

自动烹饪送餐机器人.pdf
本发明公开了自动烹饪送餐机器人,包括自动烹饪机器人以及自动送餐机器人,所述自动烹饪机器人包括灶台、若干电磁炉、若干锅、若干吸油烟装置、翻锅装置、翻炒装置、加料通道、储料箱、烹饪板、烹饪板自动出料机构、成菜输送装置以及第一控制装置;所述自动送餐机器人包括车体、储菜箱体、升降机构、端菜机构、避障传感器、定位传感器、移动电源以及第二控制装置,所述第一控制装置与所述第二控制装置无线连接。该自动烹饪送餐机器人只要在使用之前将菜洗净切好、将调料装入到对应的储料通道内,可以根据设定的程序操控进行炒制送菜,且能保证菜品的