
一种高精度车载道路坡度检测装置及方法.pdf

一吃****昕靓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高精度车载道路坡度检测装置及方法.pdf
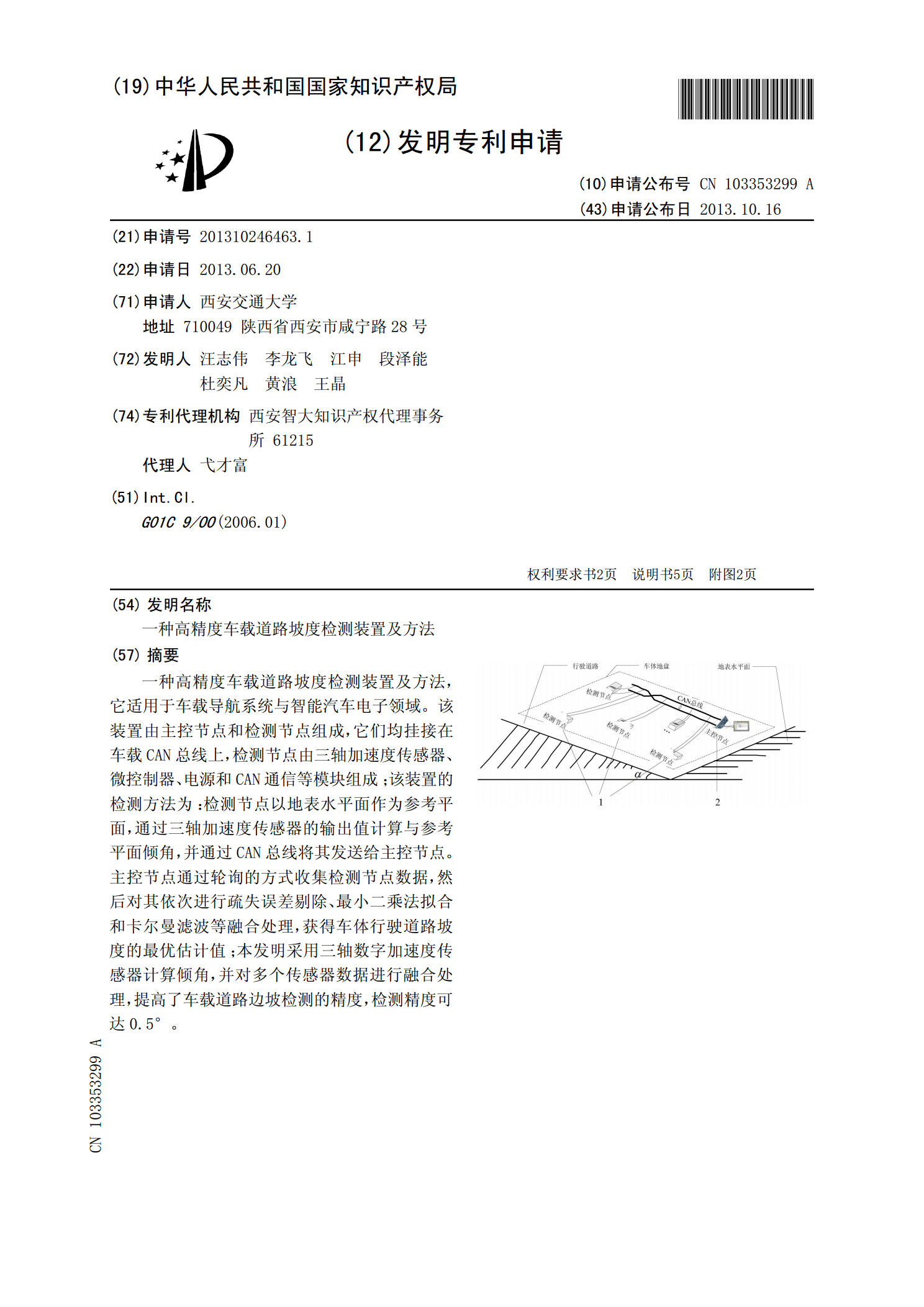
一种高精度车载道路坡度检测装置及方法,它适用于车载导航系统与智能汽车电子领域。该装置由主控节点和检测节点组成,它们均挂接在车载CAN总线上,检测节点由三轴加速度传感器、微控制器、电源和CAN通信等模块组成;该装置的检测方法为:检测节点以地表水平面作为参考平面,通过三轴加速度传感器的输出值计算与参考平面倾角,并通过CAN总线将其发送给主控节点。主控节点通过轮询的方式收集检测节点数据,然后对其依次进行疏失误差剔除、最小二乘法拟合和卡尔曼滤波等融合处理,获得车体行驶道路坡度的最优估计值;本发明采用三轴数字加速度

一种车载坡度测量装置.pdf
一种车载坡度测量装置涉及车辆安全驾驶领域,特别是对坡度角度的了解上。拥堵城市,车距短小,有的坡度不明显,很多司机不会拉手刹,起步的后溜更容易造成追尾。为减少不明显坡度对司机的麻痹影响,本发明设计一种车载坡度测量装置。技术方案是:弹簧一端连接重物板,另一端连接力传感器;重物板底部有滚动轮,滚动轮位于导行槽中,导行槽位于支撑板上,支撑板的两侧有刻度,重物板有指针指向刻度;当道路有一定的坡度时,重物板的重力在支撑板方向上的分力对弹簧拉伸或者压缩,带动指针做相应的移动,该分力也可以通过力传感器转变为电信号。有益效

一种车载道路坡度实时测试系统及测试方法.pdf
本发明公开了一种车载道路坡度实时测试系统及测试方法,测试系统由GPS测试设备、固定装置及数据采集与处理板卡构成;GPS测试设备主要用于精确获取汽车测点处的水平速度和垂直速度;固定装置用于固定GPS接收机天线位于汽车后轮的上方;数据采集与处理板卡用于实时解算出道路坡度并且通过CAN输出。测试方法方面,数据采集与处理板卡对滤波后的速度信息进行计算,处理速度快,实时性好。本发明所采用的测试系统及其测试方法安装简单,操作方便,精度较高。

一种夜间道路行人智能检测车载装置及检测方法.pdf
本发明公开了一种夜间道路行人智能检测车载装置及检测方法,它包括信息采集单元和信息预警单元,及与二者电路连接的中控单元;所述信息采集单元用于采集夜间车辆前方图像信息,中控单元用于信息处理,进行夜间行人位置及距离检测判断;信息预警单元用于输出预警提示;该装置依托红外视觉传感器采集夜间车辆前方图像,通过编写并嵌入到控制器中的基于快速显著性和多特征融合的夜间行人检测算法实现高准确率且实时性的夜间行人检测结果,结果以非常醒目的方式显示在TFT液晶屏上。
一种道路坡度检测设备及其检测方法.pdf
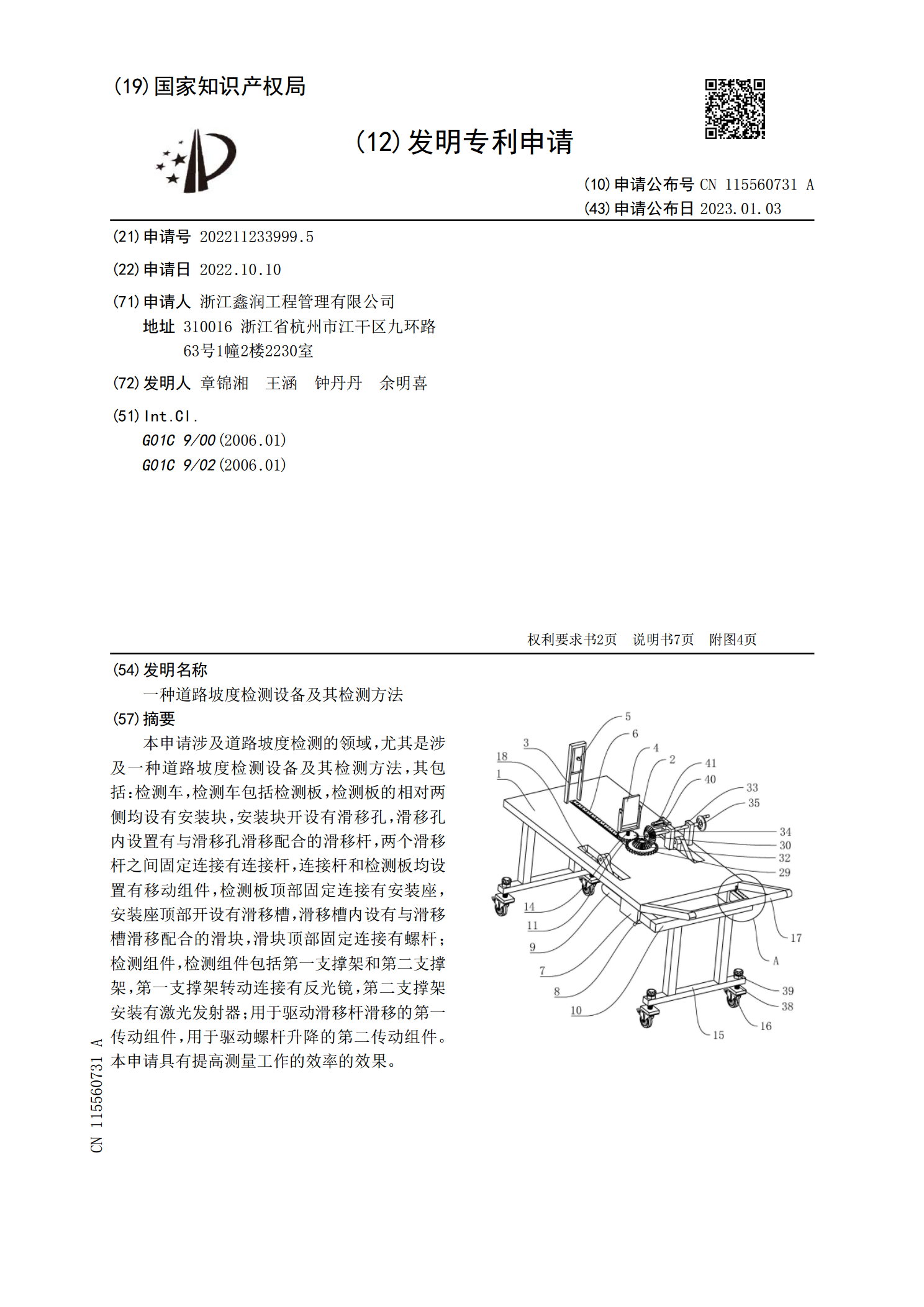
本申请涉及道路坡度检测的领域,尤其是涉及一种道路坡度检测设备及其检测方法,其包括:检测车,检测车包括检测板,检测板的相对两侧均设有安装块,安装块开设有滑移孔,滑移孔内设置有与滑移孔滑移配合的滑移杆,两个滑移杆之间固定连接有连接杆,连接杆和检测板均设置有移动组件,检测板顶部固定连接有安装座,安装座顶部开设有滑移槽,滑移槽内设有与滑移槽滑移配合的滑块,滑块顶部固定连接有螺杆;检测组件,检测组件包括第一支撑架和第二支撑架,第一支撑架转动连接有反光镜,第二支撑架安装有激光发射器;用于驱动滑移杆滑移的第一传动组件,