
越障驼运车.pdf

一只****签网


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

越障驼运车.pdf
本发明涉技一种机动车辆,特指种将履带轮和圆形轮组合应用而具有强越障能力的机动三轮车,目的旨在克服现有的机动车辆的缺陷,向社会提供一种越障能力强,适宜于田间运输、果园运输、种植园运输的机动车辆;包括(两个)履带轮、圆形轮、主变速箱、长车架、短车架、履带轮限位装置、装物箱、发动机、驾驶室:履带轮布置在主变速箱的两侧,可绕主变速箱的驱动轴旋转,履带轮限位装置限制履带轮的旋转量,长车架一头与主变速箱联接,另一头与圆形轮联接,发动机布置在长车架上并紧挨着主变速箱,驾驶室布臂在长车架之上、圆形轮和发动机之间,装物箱布
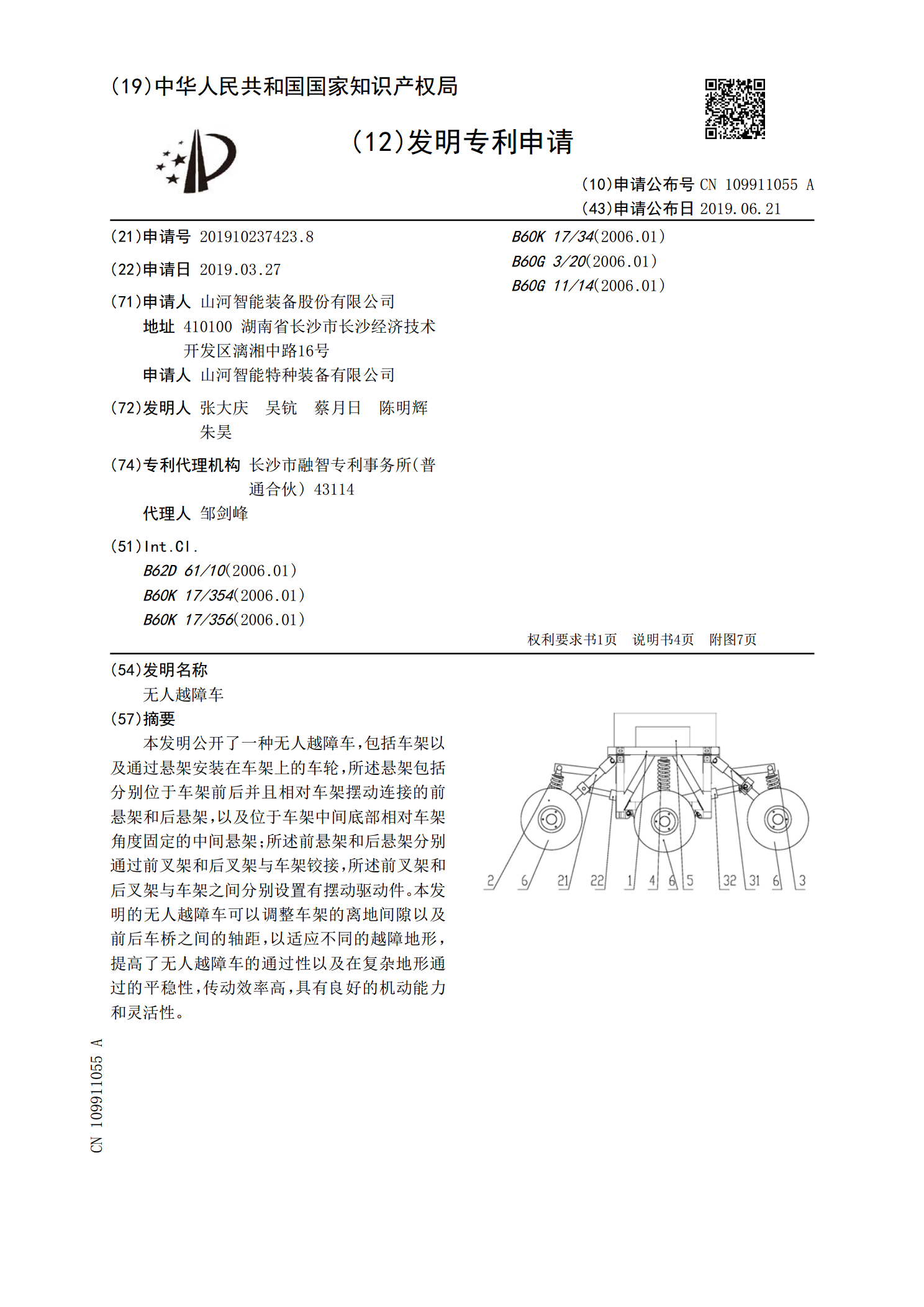
无人越障车.pdf
本发明公开了一种无人越障车,包括车架以及通过悬架安装在车架上的车轮,所述悬架包括分别位于车架前后并且相对车架摆动连接的前悬架和后悬架,以及位于车架中间底部相对车架角度固定的中间悬架;所述前悬架和后悬架分别通过前叉架和后叉架与车架铰接,所述前叉架和后叉架与车架之间分别设置有摆动驱动件。本发明的无人越障车可以调整车架的离地间隙以及前后车桥之间的轴距,以适应不同的越障地形,提高了无人越障车的通过性以及在复杂地形通过的平稳性,传动效率高,具有良好的机动能力和灵活性。
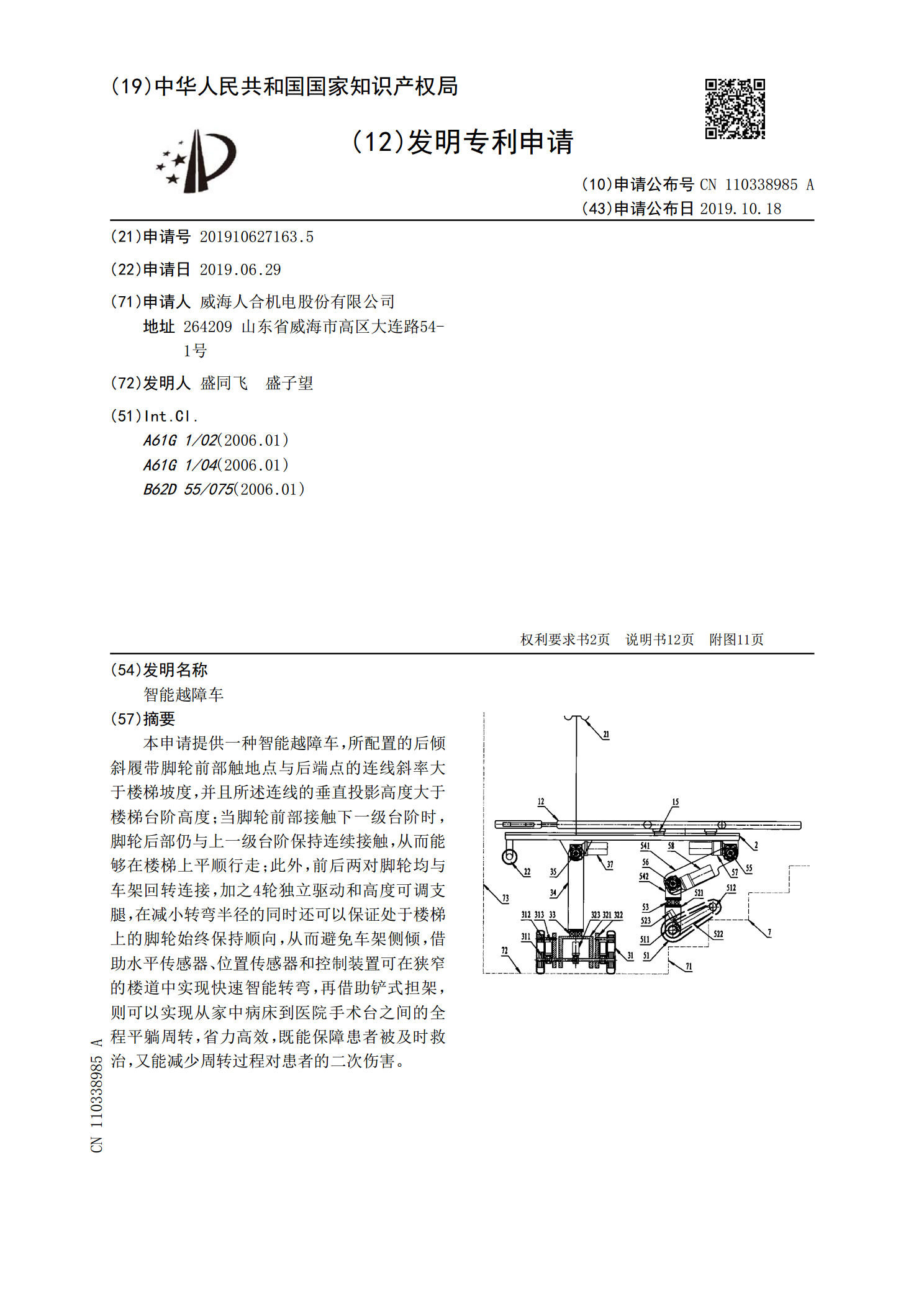
智能越障车.pdf
本申请提供一种智能越障车,所配置的后倾斜履带脚轮前部触地点与后端点的连线斜率大于楼梯坡度,并且所述连线的垂直投影高度大于楼梯台阶高度;当脚轮前部接触下一级台阶时,脚轮后部仍与上一级台阶保持连续接触,从而能够在楼梯上平顺行走;此外,前后两对脚轮均与车架回转连接,加之4轮独立驱动和高度可调支腿,在减小转弯半径的同时还可以保证处于楼梯上的脚轮始终保持顺向,从而避免车架侧倾,借助水平传感器、位置传感器和控制装置可在狭窄的楼道中实现快速智能转弯,再借助铲式担架,则可以实现从家中病床到医院手术台之间的全程平躺周转,省
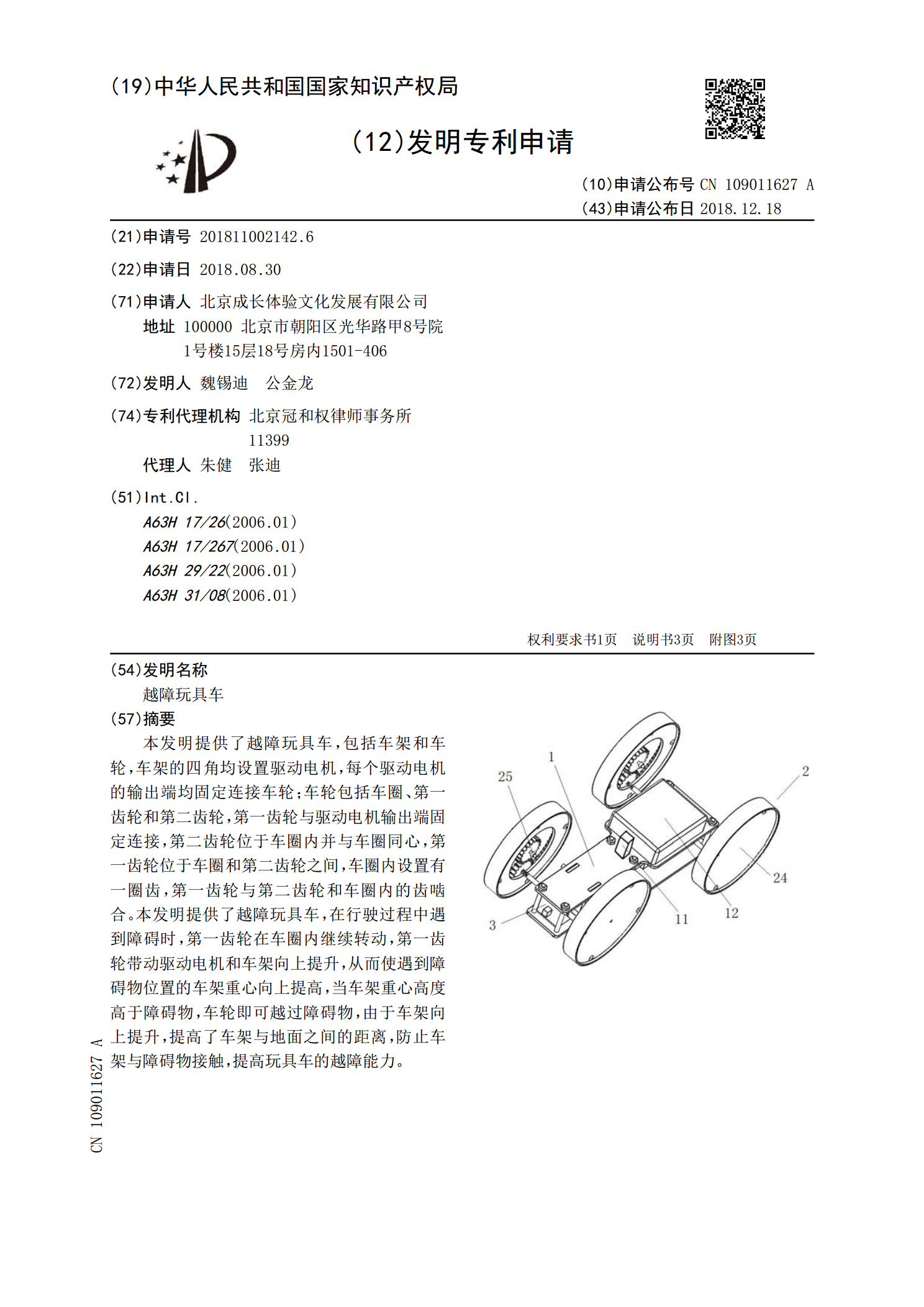
越障玩具车.pdf
本发明提供了越障玩具车,包括车架和车轮,车架的四角均设置驱动电机,每个驱动电机的输出端均固定连接车轮;车轮包括车圈、第一齿轮和第二齿轮,第一齿轮与驱动电机输出端固定连接,第二齿轮位于车圈内并与车圈同心,第一齿轮位于车圈和第二齿轮之间,车圈内设置有一圈齿,第一齿轮与第二齿轮和车圈内的齿啮合。本发明提供了越障玩具车,在行驶过程中遇到障碍时,第一齿轮在车圈内继续转动,第一齿轮带动驱动电机和车架向上提升,从而使遇到障碍物位置的车架重心向上提高,当车架重心高度高于障碍物,车轮即可越过障碍物,由于车架向上提升,提高了
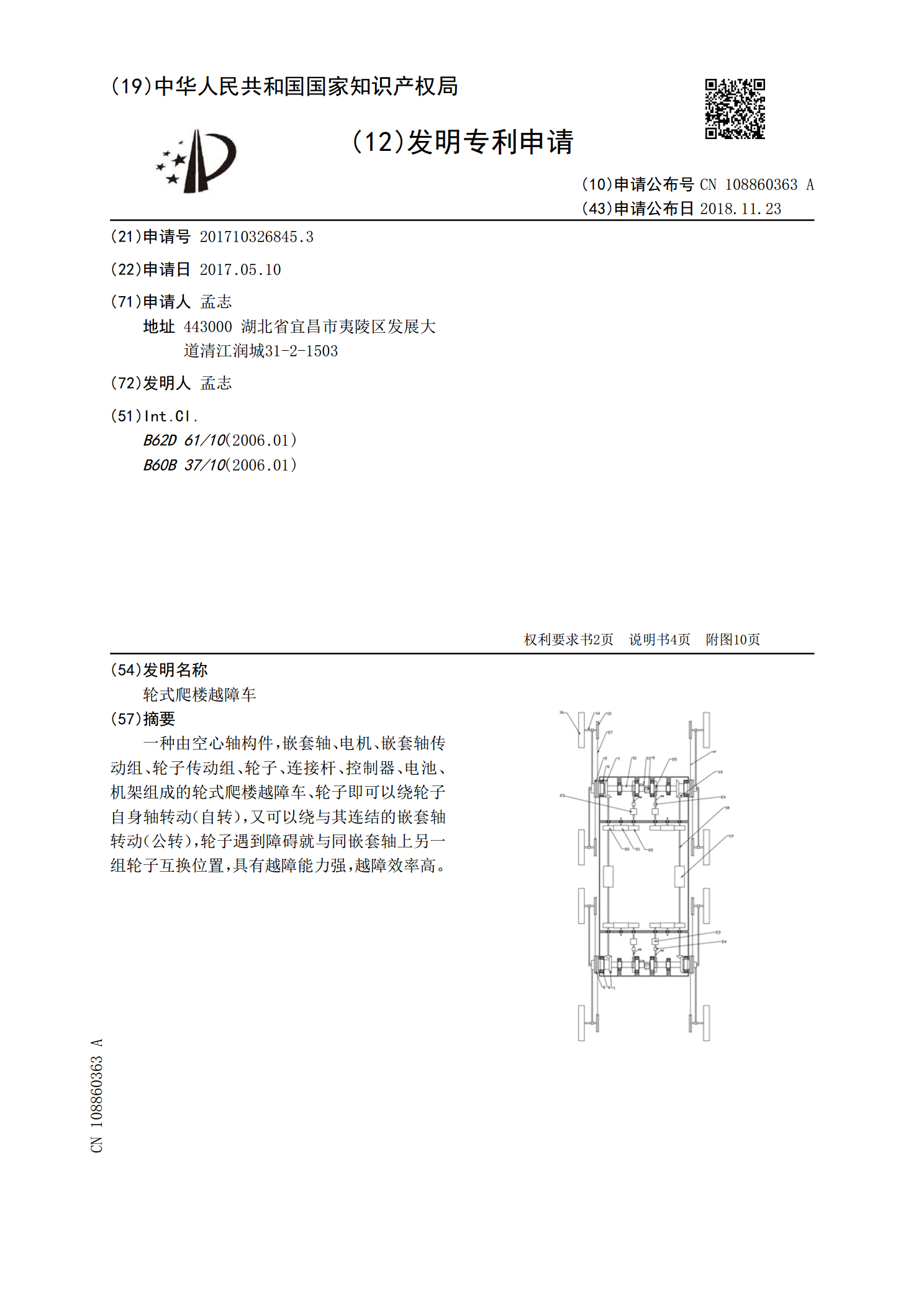
轮式爬楼越障车.pdf
一种由空心轴构件,嵌套轴、电机、嵌套轴传动组、轮子传动组、轮子、连接杆、控制器、电池、机架组成的轮式爬楼越障车、轮子即可以绕轮子自身轴转动(自转),又可以绕与其连结的嵌套轴转动(公转),轮子遇到障碍就与同嵌套轴上另一组轮子互换位置,具有越障能力强,越障效率高。